ros2/ros安装ros-dep||rosdep init错误
第一个错误的做法:
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
如果使用上述代码将会摧毁整个系统,不重装系统反正我是搞不定啊,因为我不知道那个写软件的人到底做了什么。因为这个我安装的版本是humble,这个软件识别版本都是错的
我认为后头这个文章写的比较可靠:(后面这个方法我试了一下,打不开,而且可能有病毒)
解决rosdep init和rosdep update失败的问题 - 知乎 (zhihu.com)
上述方法代理IP打不开,并且计算机出现异常,不要使用 ,但是上边这个方法可能是对的,就是网址是错的(事实证明,上边这个博客思路也是错的,后面那个才是正确的)
我好像发现了一个今天可以用的代理网址:GitHub 加速下载 - 在线工具 (ur1.fun)

我猜测如果把这个网址替换掉上边那个就可以了?
结合最后这个方法是可以解决这个问题的:
?看吧:我输入rosdep init 命令不再有提示失败的内容了
对于后边这个正确的博客我要说明一下:我在使用humble版本的时候需要把地址里面的python2.7修改为python3,另外我觉得如果可以直接修改rosdep程序,那么也许会更加省事,因为那个程序里面必然有一条判断的语句是否为空,把那条语句给他删了就什么事情都没有了也许(我是这么猜的)
解决rosdep init和rosdep update根本问题
ubuntu18.04安装melodic遇到的问题
针对目前安装ROS时出现的一些指令问题进行解析,主要卡在rosdep init和rosdep update这里,主要是被墙的太严重了。
下面开始解决它
| 1 2 3 4 |
|
?在进行rosdep init的时候需要联网访问这个网址,然而这个网址无法进入,导致一直卡这报错过不去,目前网上有很多方法,我也都尝试了,可以参考一下
https://blog.csdn.net/u013468614/article/details/102917569
https://www.guyuehome.com/12640
https://zhuanlan.zhihu.com/p/43345574
https://link.zhihu.com/?target=https%3A//www.cnblogs.com/liwe1004/p/11795932.html
https://link.zhihu.com/?target=https%3A//blog.csdn.net/maolong2725/article/details/82530722
也可以找到一个文件,加一句话主要看运气,比较玄学,方法如下:
| 1 2 3 4 5 |
|
解决思路
在进行rosdep init 的时候访问raw.githubusercontent.com,这个其实就是github的用户数据服务器。rosdep 程序下载的就是github.com/ros/rosdistro这个包里的yaml文件。
因此得到一个思路就是:首先下载github.com/ros/rosdistro包,将下列文件里面的默认的进入raw.githubusercontent.com去下载文件的url地址全部改为本地的下载的包的地址。
解决过程
第一步
首先进入www.github.com/ros/rosdistro去把这个包下载下来
包名rosdistro-master应改为rosdistro
也可以从我的网盘下载
链接:https://pan.baidu.com/s/1B4E_spuSJ_E1MANxWVrLfw
提取码:ja5d
第二步
修改这个包中rosdep/source.list.d/下的文件20-default.list,将这个文件中指向raw.githubusercontent.com的url地址全部修改为指向本地文件的地址(自己放置该包的地址),也就是该下载好的包的地址:以下是我修改好的样例:
| 1 2 3 4 5 6 7 8 9 10 |
|
***注意:***在py语言中:url本地文件地址格式是:file://+文件地址,后面更改其他文件中地址的时候也一样。
第三步
修改/usr/lib/python2.7/dist-packages/rosdep2/main.py中的默认的url的地址,但是经过代码阅读,该文件中并不存在指向raw.githubusercontent.com的代码。而且经过对代码的分析,提示报错的代码就在该文件中
| 1 2 3 4 5 6 7 8 |
|
由于其调用了download_default_sources_list()这个函数
而该函数就在/usr/lib/python2.7/dist-packages/rosdep2该文件夹下面的sources_list.py文件里面。而这个文件里面的代码则进行了访问raw.githubusercontent.com的操作,因此修改该默认url即可
| 1 2 3 4 5 |
|
总结:该步实际并不是修改 main.py 文件里面默认url的指向地址,而是修改同文件夹下的sources_list.py文件里面的代码
第四步
修改以下两个文件里面的代码,修改方法类似:
| 1 2 |
|
下面是我分别修改后的样例:
修改rep3.py文件
| 1 |
|
| 1 2 3 4 |
|
修改__init__.py的文件
| 1 |
|
| 1 2 3 4 5 |
|
然后进行sudo rosdep init? 就没有什么问题了
如果你是ubuntu20.04安装noetic的话,就要更改一些细节了:noetic不是更改/usr/lib/python2.7/dist-packages/了,而是更改/usr/lib/python3/dist-packages/
最后感谢原博主:
https://blog.csdn.net/nanianwochengshui/article/details/105702188
故事还没有结束:上边这个方法是错的:这个办法虽然对于init部分没有问题,但是当具体要使用rosdep的时候,会要求update,然后会出问题,最后我使用了那个小鱼一键安装rosdep,就把update的问题也解决了。
wget http://fishros.com/install -O fishros && bash fishros执行上边,然后选择3----也就是选择rosdep安装就搞定了,毕竟我们不是专门去研究ros2这个东西,我们是要去搞机器人的,所以还是把专业的事情交给专业的人去搞

?出现上边这个就说明没问题了:#ALL required rosdeps installed successfully
最后附带一个没有经过任何修饰的原装的rosdep update
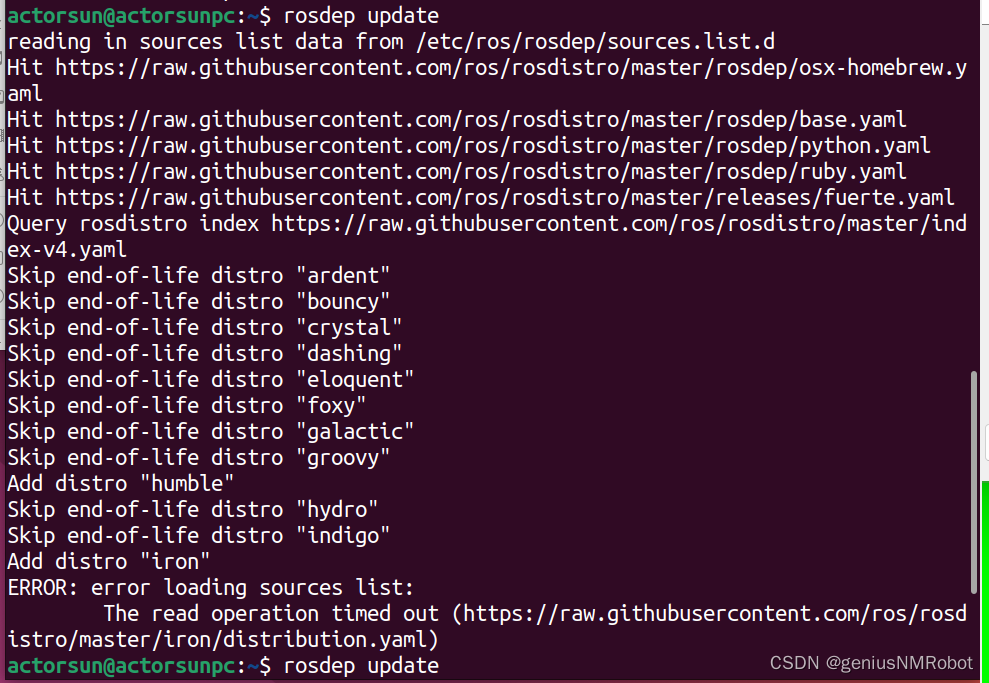
我惊奇的发现虽然失败了,但是原装的居然对于版本的判断也会失败,因为我用的是humble,但是这个里面在判断为humble的同时,还选择了iron,这就搞不懂了
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!