[XR806开发板试用] XR806——基于FreeRTOS下部署竞技机器人先进模糊控制器
2023-12-21 12:43:24
前言
- 很荣幸参与到由“极术社区和全志在线联合组织”举办的XR806开发板试用活动。
- 本人热衷于各种的开发板的开发,同时更愿意将其实现到具体项目中。
- 秉承以上原则,发现大家的重心都放在开发中的环境构建过程,缺少了不少实际应用场景的运用,虽然环境搭建确实痛苦。本文主要使用XR806的FreeRTOS到实际的机器人控制应用中,并实现部署模糊控制器。
- 环境搭建本文简要略写,大家可以看社区其它优秀的文章。
- 文章中应用到的无线控制和多维状态机两个重要的开发应用,会在后面的文章中陆续更新。
使用环境
1.本人使用window10+VMware+ubuntu 18.04 这里不多阐述
2.按照官方文档移植XR806的FreeRTOS
项目介绍
基于XR806——FreeRTOS为项目主控,部署先进模糊控制器,实现对于竞技机器人的机构控制和定位控制等。
渲染图
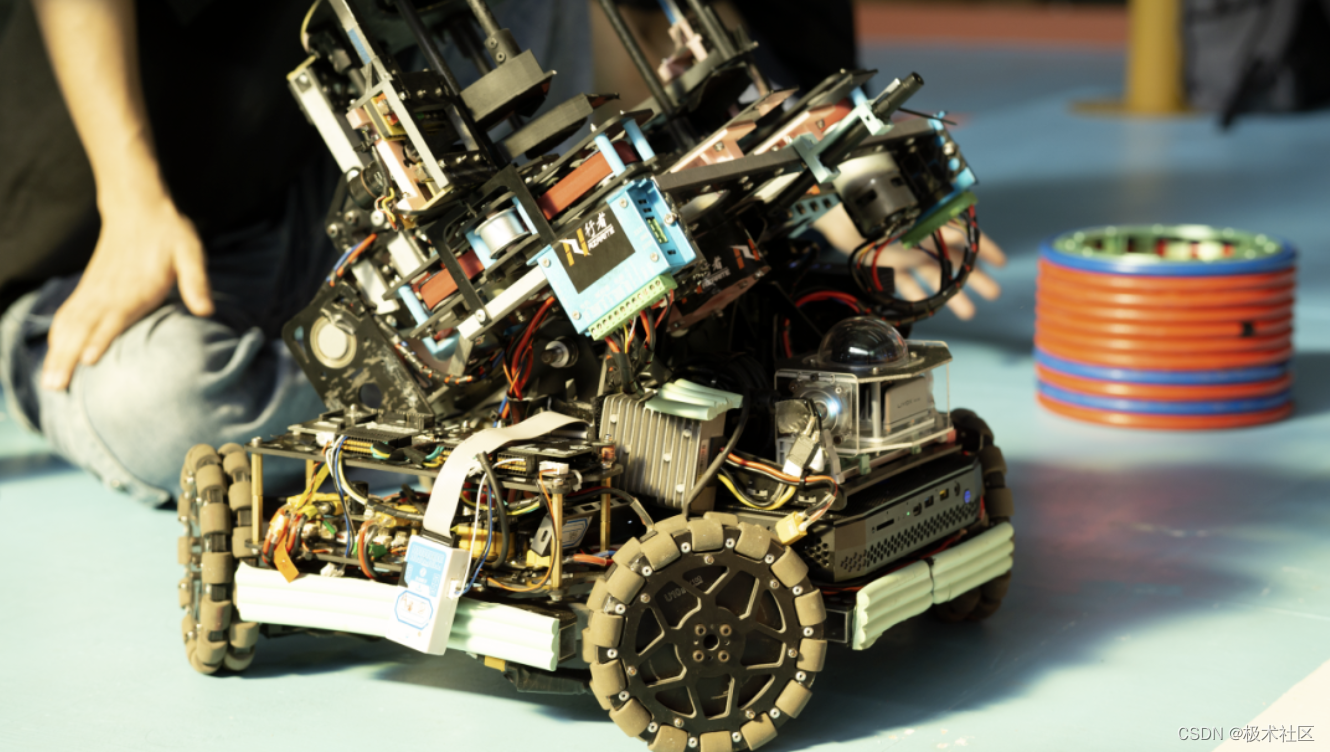
实物图
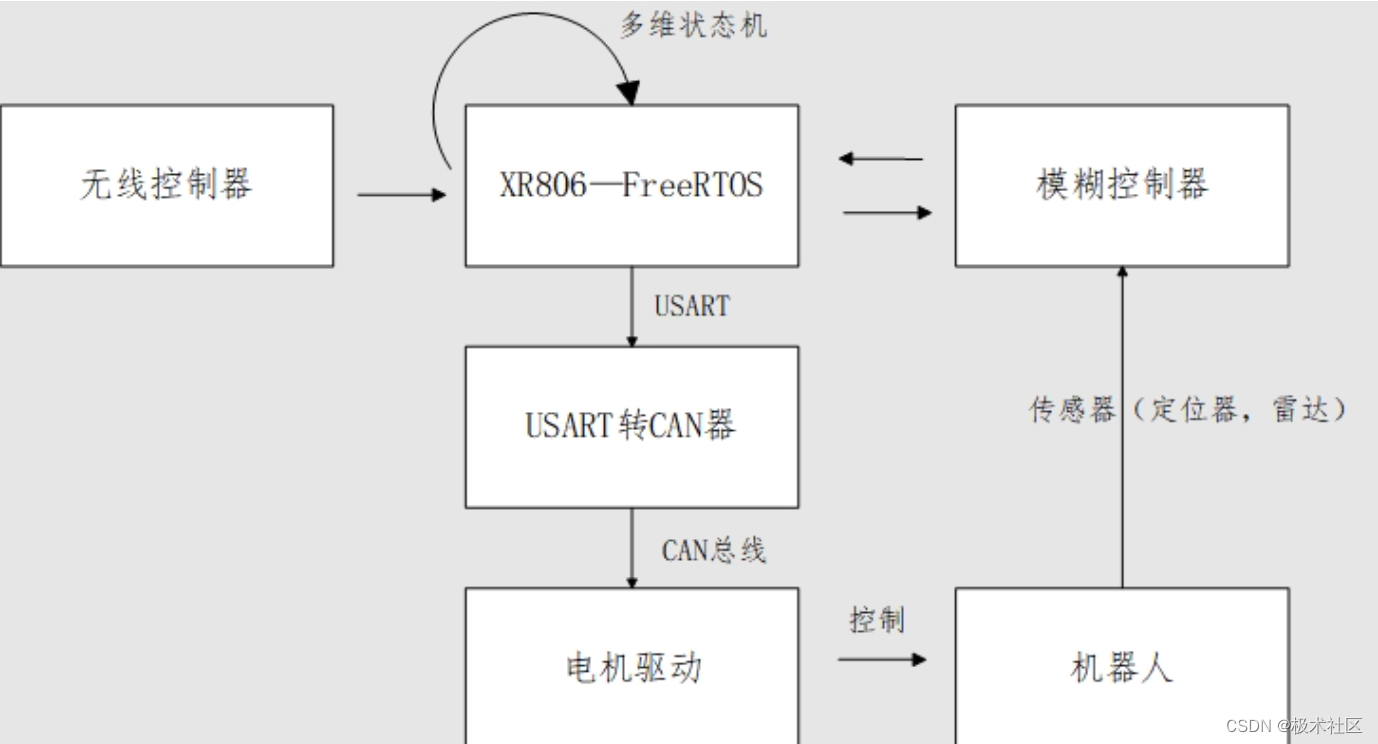
软硬件框架
控制部署
继电推理
在封装好电机驱动电流环时,实现对电机的控制,相当于建立了一种
继电特性的非线性控制,此时使用继电整定法的Z-N临界比例度法去建立模糊域。
根据以下临界系数表,整定求出模糊域。
| 控制器类型 | KP | Tn | Tv | Ki | Kd |
|---|---|---|---|---|---|
| P | 0.5*Kμ | — | — | — | — |
| PD | 0.8*Kμ | — | 0.12*Tμ | — | KP*Tn |
| PI | 0.45*Kμ | 0.85*Tμ | — | KP/Tn | — |
| PID | 0.6*Kμ | 0.5*Tμ | 0.12*Tμ | KP/ Tn | KP*Tn |
模糊推理
模糊推理的核心就是计算出E和EC的隶属度。同时把E和EC分为多种子集情况:负最大NB,负中NM,负小NS,零ZO,正小PS,正中PM,正大PB等七种情况。然后计算E/EC种子集的隶属度。
清晰化
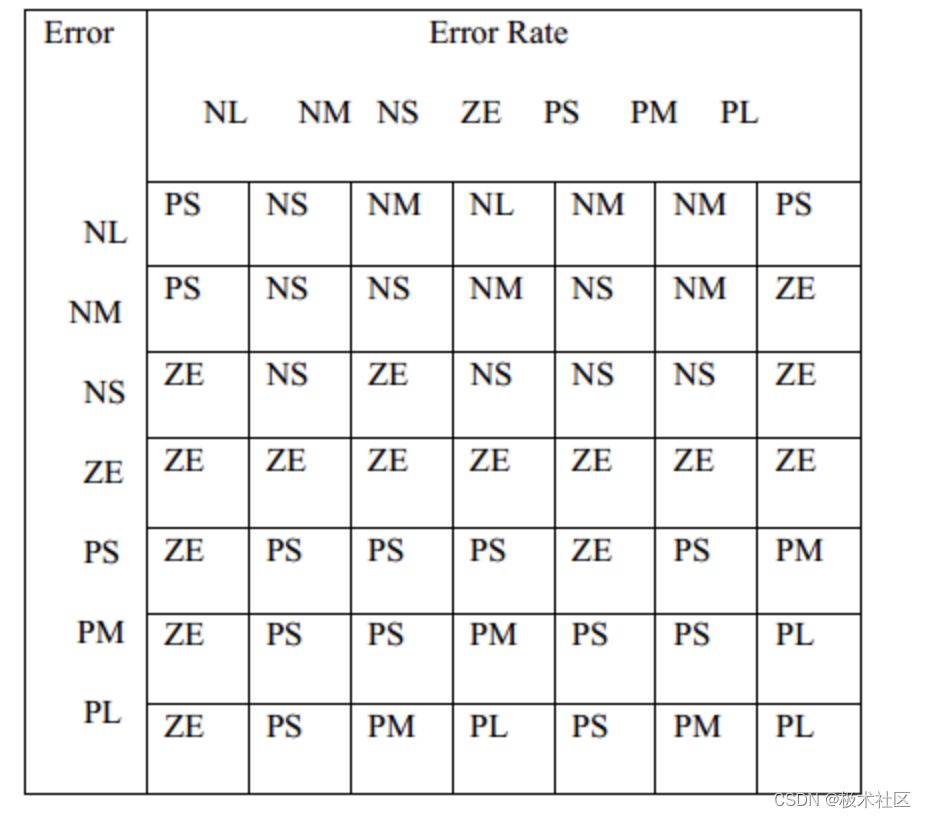
进行模糊推理后,可以根据计算的隶属度,建立模糊规则表,实现对输出值的清晰化。对应到应用层的输出函数,实现控制输出。
例图:
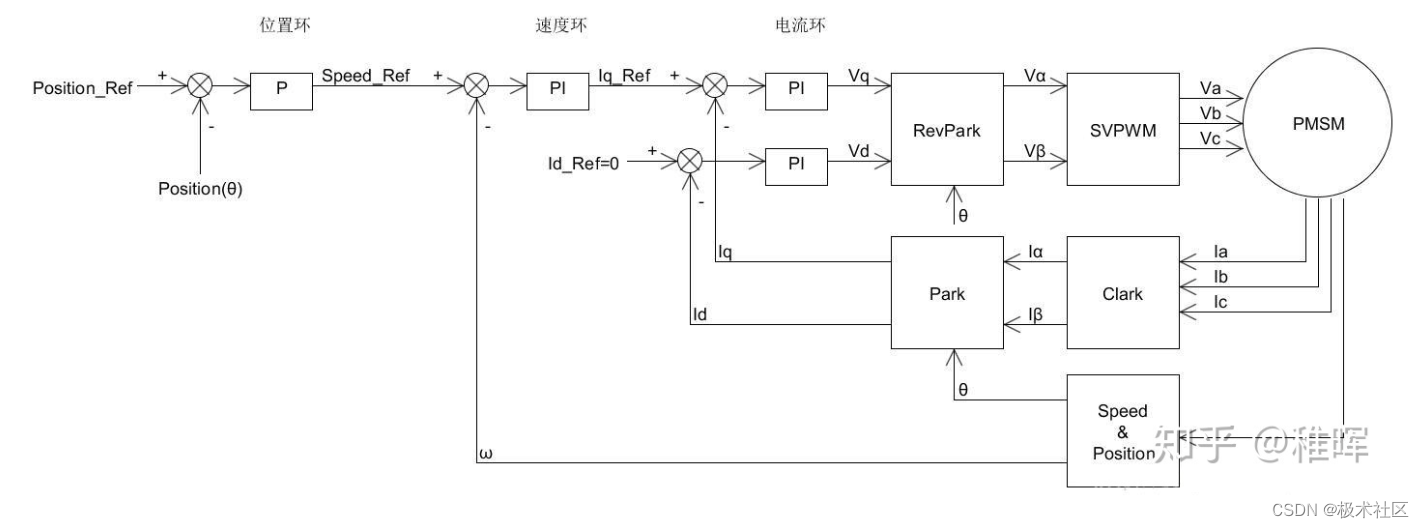
FOC控制
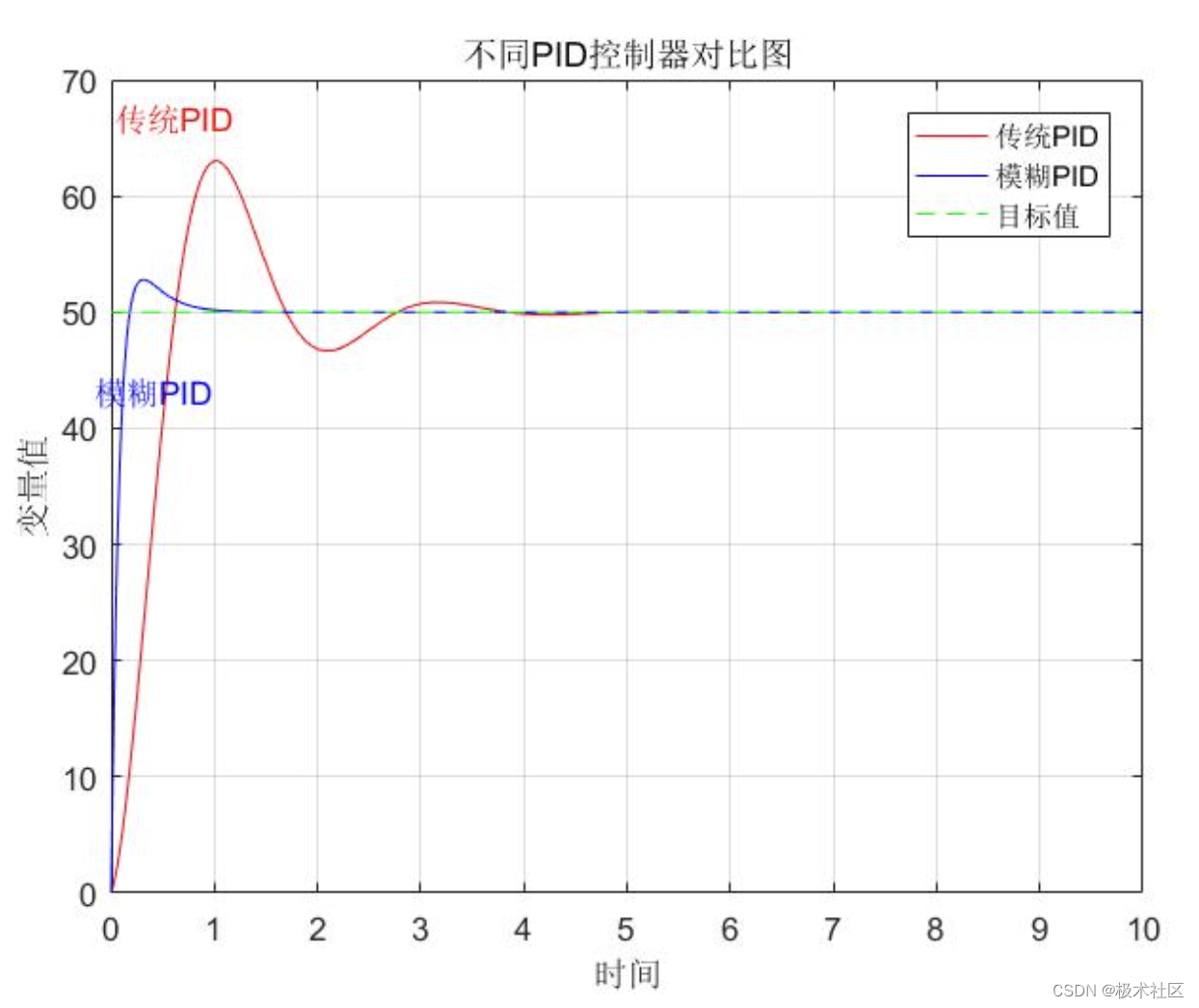
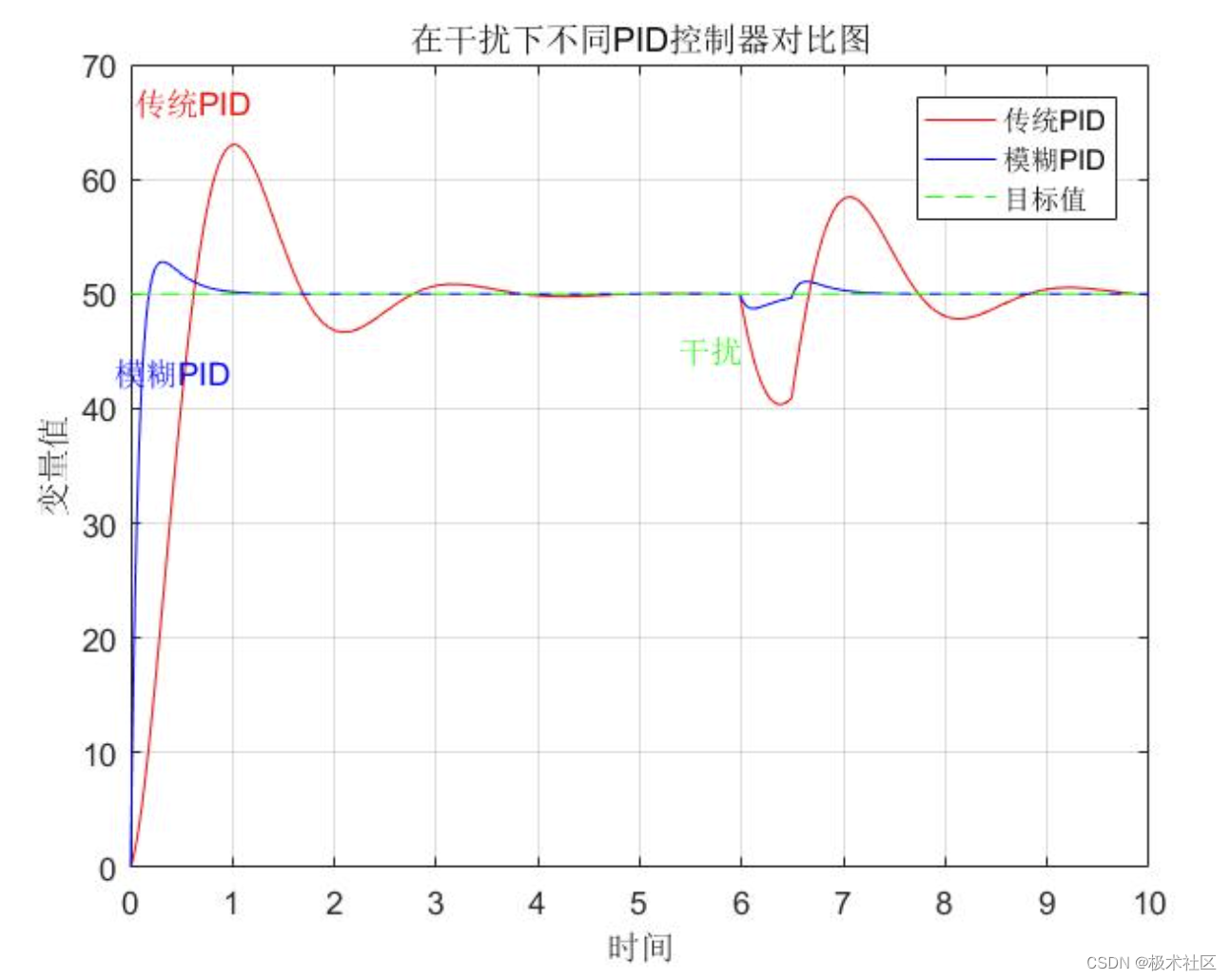
仿真效果
代码实现
以下提供部分代码:
自动整定
void PID_AutoTune_Task(void)
{
if(pid.AutoRegurating_Status != START) return;
/*定义临界Tc*/
float Tc = 0.0;
static int start_cnt; //记录最大值出现的时间
static int end_cnt; //记录周期结束时的时间值
static uint16_t cool_cnt = 0;
static uint16_t heat_cnt = 0;
// pid.Autotune_Cnt ++; //计数
if((pid.Pv_position == UP) && (pid.Pv < pid.Sv))
{
cool_cnt ++;
if(cool_cnt >= 3) //连续三次都越过,则说明真的越过了
{
pid.Pv_position = DOWN; //标记当前在下方了
pid.Zero_Across_Cnt ++; //标记穿越一次
cool_cnt = 0;
}
}
else if((pid.Pv_position == DOWN)&&(pid.Pv > pid.Sv))//刚才在下方,现在在上方
{
heat_cnt++;
if(heat_cnt >= 3) //连续三次都越过,则说明真的越过了
{
pid.Pv_position = UP; //标记当前在下方了
pid.Zero_Across_Cnt ++; //标记穿越一次
heat_cnt = 0;
}
}
/*****************开始计算强行振荡的周期****************************/
if((pid.Zero_Across_Cnt == 2)&&(start_cnt == 0))
{
start_cnt = pid.Autotune_Cnt;
printf("start_time = %d\r\n", start_cnt);
}else if((pid.Zero_Across_Cnt == 4)&&(end_cnt == 0))
{
end_cnt = pid.Autotune_Cnt;
printf("start_time = %d\r\n", end_cnt);
}
if(pid.Zero_Across_Cnt == 4)
{
/*计算一个震荡周期的时间*/
if(start_cnt > end_cnt)
Tc = (start_cnt-end_cnt)/2;
else
Tc = (end_cnt-start_cnt)/2;
/*计算Kp,Ti和Td*/
pid.Kp = 0.6*pid.Kp;
pid.Ti = Tc*0.5;
pid.Td = Tc*0.12;
/*PID参数整定完成,将各项数据清0*/
heat_cnt = 0;
cool_cnt = 0;
pid.Autotune_Cnt = 0;
start_cnt = 0;
end_cnt = 0;
pid.SEk = 0;
pid.Zero_Across_Cnt = 0;
pid.AutoRegurating_EN = OFF;
pid.AutoRegurating_Status = OVER; //开始运行使用新的参数后的PID算法
pid.Sv = pid.BKSv;
}
}
模糊控制
/*模糊规则表*/
int KpRule[7][7]= {
/*NB, NM, NS, ZO, PS, PM, PB -EC*/
{1, 1, 1, 1, 1, 1, 1}, //NB 0~-10
{0, 0, 0, 1, 2, 3, 4}, //NM 0~10
{0, 0, 0, 1, 2, 3, 4}, //NS 10~20
{0, 0, 1, 1, 2, 3, 4}, //20~30
{1, 1, 1, 1, 2, 3, 4}, //30~40
{1, 1, 1, 1, 2, 3, 4}, //40 ~50
{6, 6, 6, 6, 6, 6, 6}, //50~60
};
static float fuzzy_kp(float err, float errchange)
{
volatile float Kp_calcu;
volatile uint8_t num,pe,pec;
volatile float eFuzzy[2]={0.0,0.0}; //隶属于误差E的隶属程度
volatile float ecFuzzy[2]={0.0,0.0}; //隶属于误差变化率EC的隶属程度
float KpFuzzy[7]={0.0,0.0,0.0,0.0,0.0,0.0,0.0}; //隶属于Kp的隶属程度
/*****误差E隶属函数描述*****/
if(err<eRule[0])
{
eFuzzy[0] =1.0;
pe = 0;
}
else if(eRule[0]<=err && err<eRule[1])
{
eFuzzy[0] = (eRule[1]-err)/(eRule[1]-eRule[0]);
pe = 0;
}
else if(eRule[1]<=err && err<eRule[2])
{
eFuzzy[0] = (eRule[2] -err)/(eRule[2]-eRule[1]);
pe = 1;
}
else if(eRule[2]<=err && err<eRule[3])
{
eFuzzy[0] = (eRule[3] -err)/(eRule[3]-eRule[2]);
pe = 2;
}
else if(eRule[3]<=err && err<eRule[4])
{
eFuzzy[0] = (eRule[4]-err)/(eRule[4]-eRule[3]);
pe = 3;
}
else if(eRule[4]<=err && err<eRule[5])
{
eFuzzy[0] = (eRule[5]-err)/(eRule[5]-eRule[4]);
pe = 4;
}
else if(eRule[5]<=err && err<eRule[6])
{
eFuzzy[0] = (eRule[6]-err)/(eRule[6]-eRule[5]);
pe = 5;
}
else
{
eFuzzy[0] = 0.0;
pe = 6;
}
eFuzzy[1] =1.0 - eFuzzy[0];
/*****误差变化率EC隶属函数描述*****/
if(errchange<ecRule[0])
{
ecFuzzy[0] =1.0;
pec = 0;
}
else if(ecRule[0]<=errchange && errchange<ecRule[1])
{
ecFuzzy[0] = (ecRule[1] - errchange)/(ecRule[1]-ecRule[0]);
pec = 0 ;
}
else if(ecRule[1]<=errchange && errchange<ecRule[2])
{
ecFuzzy[0] = (ecRule[2] - errchange)/(ecRule[2]-ecRule[1]);
pec = 1;
}
else if(ecRule[2]<=errchange && errchange<ecRule[3])
{
ecFuzzy[0] = (ecRule[3] - errchange)/(ecRule[3]-ecRule[2]);
pec = 2 ;
}
else if(ecRule[3]<=errchange && errchange<ecRule[4])
{
ecFuzzy[0] = (ecRule[4]-errchange)/(ecRule[4]-ecRule[3]);
pec=3;
}
else if(ecRule[4]<=errchange && errchange<ecRule[5])
{
ecFuzzy[0] = (ecRule[5]-errchange)/(ecRule[5]-ecRule[4]);
pec=4;
}
else if(ecRule[5]<=errchange && errchange<ecRule[6])
{
ecFuzzy[0] = (ecRule[6]-errchange)/(ecRule[6]-ecRule[5]);
pec=5;
}
else
{
ecFuzzy[0] =0.0;
pec = 5;
}
ecFuzzy[1] = 1.0 - ecFuzzy[0];
/*********查询模糊规则表*********/
num = KpRule[pe][pec];
KpFuzzy[num] += (eFuzzy[0]*ecFuzzy[0]);
num = KpRule[pe][pec+1];
KpFuzzy[num] += (eFuzzy[0]*ecFuzzy[1]);
num =KpRule[pe+1][pec];
KpFuzzy[num] += (eFuzzy[1]*ecFuzzy[0]);
num = KpRule[pe+1][pec+1];
KpFuzzy[num] += (eFuzzy[1]*ecFuzzy[1]);
/*********加权平均法解模糊*********/
Kp_calcu = KpFuzzy[0]*kpRule[0] +KpFuzzy[1]*kpRule[1]+ \
KpFuzzy[2]*kpRule[2] +KpFuzzy[3]*kpRule[3]+ \
KpFuzzy[4]*kpRule[4] +KpFuzzy[5]*kpRule[5]+ \
+KpFuzzy[6]*kpRule[6];
printf(" %f,%f,%d,%d,kp = %f\r\n", err, errchange, pe, pec, Kp_calcu);
return(Kp_calcu);
}
实物展示
无刷电机控制
https://www.bilibili.com/video/BV1FN4y1C7fY/?aid=874778769&cid=1302701130&page=null
整体定位控制
https://www.bilibili.com/video/BV1NN411t7Fy/?aid=492262076&cid=1302702003&page=null
以上,就是本文分享的全部内容了,感谢各位
文章来源:https://blog.csdn.net/weixin_47569031/article/details/135126760
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!