yolov8seg onnx推理
2023-12-26 17:31:46
yolov8分割模型的后处理-分割输出解释
- 输入:(1,3,640,640)
- 输出:output[0] (1,4+80+32=116,8080+4040+20*20=8400), output[1] (1,32,160,160)
- 输出解释:第一个输出,4个bbox参数+80coco类别+32个mask weight,第二个输出是32个mask原型,需要mask weight*mask原型才是真正的mask。具体解释,看链接
1. 分割模型转换
权重官网下载
from ultralytics import YOLO
# 载入一个模型
model = YOLO('yolov8n-seg.pt') # 载入官方模型
# 导出模型
model.export(format='onnx')
2. 读取onnx模型,后处理推理
import math
import time
import cv2
import numpy as np
import onnxruntime
class_names = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard',
'cell phone', 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase',
'scissors', 'teddy bear', 'hair drier', 'toothbrush']
# Create a list of colors for each class where each color is a tuple of 3 integer values
rng = np.random.default_rng(3)
colors = rng.uniform(0, 255, size=(len(class_names), 3))
def nms(boxes, scores, iou_threshold):
# Sort by score
sorted_indices = np.argsort(scores)[::-1]
keep_boxes = []
while sorted_indices.size > 0:
# Pick the last box
box_id = sorted_indices[0]
keep_boxes.append(box_id)
# Compute IoU of the picked box with the rest
ious = compute_iou(boxes[box_id, :], boxes[sorted_indices[1:], :])
# Remove boxes with IoU over the threshold
keep_indices = np.where(ious < iou_threshold)[0]
# print(keep_indices.shape, sorted_indices.shape)
sorted_indices = sorted_indices[keep_indices + 1]
return keep_boxes
def compute_iou(box, boxes):
# Compute xmin, ymin, xmax, ymax for both boxes
xmin = np.maximum(box[0], boxes[:, 0])
ymin = np.maximum(box[1], boxes[:, 1])
xmax = np.minimum(box[2], boxes[:, 2])
ymax = np.minimum(box[3], boxes[:, 3])
# Compute intersection area
intersection_area = np.maximum(0, xmax - xmin) * np.maximum(0, ymax - ymin)
# Compute union area
box_area = (box[2] - box[0]) * (box[3] - box[1])
boxes_area = (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1])
union_area = box_area + boxes_area - intersection_area
# Compute IoU
iou = intersection_area / union_area
return iou
def xywh2xyxy(x):
# Convert bounding box (x, y, w, h) to bounding box (x1, y1, x2, y2)
y = np.copy(x)
y[..., 0] = x[..., 0] - x[..., 2] / 2
y[..., 1] = x[..., 1] - x[..., 3] / 2
y[..., 2] = x[..., 0] + x[..., 2] / 2
y[..., 3] = x[..., 1] + x[..., 3] / 2
return y
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def draw_detections(image, boxes, scores, class_ids, mask_alpha=0.3, mask_maps=None):
img_height, img_width = image.shape[:2]
size = min([img_height, img_width]) * 0.0006
text_thickness = int(min([img_height, img_width]) * 0.001)
mask_img = draw_masks(image, boxes, class_ids, mask_alpha, mask_maps)
# Draw bounding boxes and labels of detections
for box, score, class_id in zip(boxes, scores, class_ids):
color = colors[class_id]
x1, y1, x2, y2 = box.astype(int)
# Draw rectangle
cv2.rectangle(mask_img, (x1, y1), (x2, y2), color, 2)
label = class_names[class_id]
caption = f'{label} {int(score * 100)}%'
(tw, th), _ = cv2.getTextSize(text=caption, fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=size, thickness=text_thickness)
th = int(th * 1.2)
cv2.rectangle(mask_img, (x1, y1),
(x1 + tw, y1 - th), color, -1)
cv2.putText(mask_img, caption, (x1, y1),
cv2.FONT_HERSHEY_SIMPLEX, size, (255, 255, 255), text_thickness, cv2.LINE_AA)
return mask_img
def draw_masks(image, boxes, class_ids, mask_alpha=0.3, mask_maps=None):
mask_img = image.copy()
# Draw bounding boxes and labels of detections
for i, (box, class_id) in enumerate(zip(boxes, class_ids)):
color = colors[class_id]
x1, y1, x2, y2 = box.astype(int)
# Draw fill mask image
if mask_maps is None:
cv2.rectangle(mask_img, (x1, y1), (x2, y2), color, -1)
else:
crop_mask = mask_maps[i][y1:y2, x1:x2, np.newaxis]
crop_mask_img = mask_img[y1:y2, x1:x2]
crop_mask_img = crop_mask_img * (1 - crop_mask) + crop_mask * color
mask_img[y1:y2, x1:x2] = crop_mask_img
return cv2.addWeighted(mask_img, mask_alpha, image, 1 - mask_alpha, 0)
def draw_comparison(img1, img2, name1, name2, fontsize=2.6, text_thickness=3):
(tw, th), _ = cv2.getTextSize(text=name1, fontFace=cv2.FONT_HERSHEY_DUPLEX,
fontScale=fontsize, thickness=text_thickness)
x1 = img1.shape[1] // 3
y1 = th
offset = th // 5
cv2.rectangle(img1, (x1 - offset * 2, y1 + offset),
(x1 + tw + offset * 2, y1 - th - offset), (0, 115, 255), -1)
cv2.putText(img1, name1,
(x1, y1),
cv2.FONT_HERSHEY_DUPLEX, fontsize,
(255, 255, 255), text_thickness)
(tw, th), _ = cv2.getTextSize(text=name2, fontFace=cv2.FONT_HERSHEY_DUPLEX,
fontScale=fontsize, thickness=text_thickness)
x1 = img2.shape[1] // 3
y1 = th
offset = th // 5
cv2.rectangle(img2, (x1 - offset * 2, y1 + offset),
(x1 + tw + offset * 2, y1 - th - offset), (94, 23, 235), -1)
cv2.putText(img2, name2,
(x1, y1),
cv2.FONT_HERSHEY_DUPLEX, fontsize,
(255, 255, 255), text_thickness)
combined_img = cv2.hconcat([img1, img2])
if combined_img.shape[1] > 3840:
combined_img = cv2.resize(combined_img, (3840, 2160))
return combined_img
class YOLOSeg:
def __init__(self, path, conf_thres=0.7, iou_thres=0.5, num_masks=32):
self.conf_threshold = conf_thres
self.iou_threshold = iou_thres
self.num_masks = num_masks
# Initialize model
self.initialize_model(path)
def __call__(self, image):
return self.segment_objects(image)
def initialize_model(self, path):
self.session = onnxruntime.InferenceSession(path,
providers=['CUDAExecutionProvider',
'CPUExecutionProvider'])
# Get model info
self.get_input_details()
self.get_output_details()
def segment_objects(self, image):
input_tensor = self.prepare_input(image)
# Perform inference on the image # 注意用dfl回归bbox的话,bbox的维度就是80+16*4+32
outputs = self.inference(input_tensor) # output[0] (1,4+80+32=116,80*80+40*40+20*20=8400) // output[1] (1,32,160,160)
# 对输出0进行处理,返回bbox和对应的mask_feature
self.boxes, self.scores, self.class_ids, mask_pred = self.process_box_output(outputs[0])
self.mask_maps = self.process_mask_output(mask_pred, outputs[1])
return self.boxes, self.scores, self.class_ids, self.mask_maps
def prepare_input(self, image):
self.img_height, self.img_width = image.shape[:2]
input_img = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# Resize input image
input_img = cv2.resize(input_img, (self.input_width, self.input_height))
# Scale input pixel values to 0 to 1
input_img = input_img / 255.0
input_img = input_img.transpose(2, 0, 1)
input_tensor = input_img[np.newaxis, :, :, :].astype(np.float32)
return input_tensor
def inference(self, input_tensor):
start = time.perf_counter()
outputs = self.session.run(self.output_names, {self.input_names[0]: input_tensor})
# print(f"Inference time: {(time.perf_counter() - start)*1000:.2f} ms")
return outputs
def process_box_output(self, box_output):
predictions = np.squeeze(box_output).T
num_classes = box_output.shape[1] - self.num_masks - 4
# Filter out object confidence scores below threshold
scores = np.max(predictions[:, 4:4+num_classes], axis=1)
predictions = predictions[scores > self.conf_threshold, :]
scores = scores[scores > self.conf_threshold]
if len(scores) == 0:
return [], [], [], np.array([])
box_predictions = predictions[..., :num_classes+4]
mask_predictions = predictions[..., num_classes+4:]
# Get the class with the highest confidence
class_ids = np.argmax(box_predictions[:, 4:], axis=1)
# Get bounding boxes for each object
boxes = self.extract_boxes(box_predictions)
# Apply non-maxima suppression to suppress weak, overlapping bounding boxes
indices = nms(boxes, scores, self.iou_threshold)
return boxes[indices], scores[indices], class_ids[indices], mask_predictions[indices]
def process_mask_output(self, mask_predictions, mask_output):
if mask_predictions.shape[0] == 0:
return []
mask_output = np.squeeze(mask_output)
# Calculate the mask maps for each box
num_mask, mask_height, mask_width = mask_output.shape # CHW
masks = sigmoid(mask_predictions @ mask_output.reshape((num_mask, -1)))
masks = masks.reshape((-1, mask_height, mask_width))
# Downscale the boxes to match the mask size
scale_boxes = self.rescale_boxes(self.boxes,
(self.img_height, self.img_width),
(mask_height, mask_width))
# For every box/mask pair, get the mask map
mask_maps = np.zeros((len(scale_boxes), self.img_height, self.img_width))
blur_size = (int(self.img_width / mask_width), int(self.img_height / mask_height))
for i in range(len(scale_boxes)):
scale_x1 = int(math.floor(scale_boxes[i][0]))
scale_y1 = int(math.floor(scale_boxes[i][1]))
scale_x2 = int(math.ceil(scale_boxes[i][2]))
scale_y2 = int(math.ceil(scale_boxes[i][3]))
x1 = int(math.floor(self.boxes[i][0]))
y1 = int(math.floor(self.boxes[i][1]))
x2 = int(math.ceil(self.boxes[i][2]))
y2 = int(math.ceil(self.boxes[i][3]))
scale_crop_mask = masks[i][scale_y1:scale_y2, scale_x1:scale_x2]
crop_mask = cv2.resize(scale_crop_mask,
(x2 - x1, y2 - y1),
interpolation=cv2.INTER_CUBIC)
crop_mask = cv2.blur(crop_mask, blur_size)
crop_mask = (crop_mask > 0.5).astype(np.uint8)
mask_maps[i, y1:y2, x1:x2] = crop_mask
return mask_maps
def extract_boxes(self, box_predictions):
# Extract boxes from predictions
boxes = box_predictions[:, :4]
# Scale boxes to original image dimensions
boxes = self.rescale_boxes(boxes,
(self.input_height, self.input_width),
(self.img_height, self.img_width))
# Convert boxes to xyxy format
boxes = xywh2xyxy(boxes)
# Check the boxes are within the image
boxes[:, 0] = np.clip(boxes[:, 0], 0, self.img_width)
boxes[:, 1] = np.clip(boxes[:, 1], 0, self.img_height)
boxes[:, 2] = np.clip(boxes[:, 2], 0, self.img_width)
boxes[:, 3] = np.clip(boxes[:, 3], 0, self.img_height)
return boxes
def draw_detections(self, image, draw_scores=True, mask_alpha=0.4):
return draw_detections(image, self.boxes, self.scores,
self.class_ids, mask_alpha)
def draw_masks(self, image, draw_scores=True, mask_alpha=0.5):
return draw_detections(image, self.boxes, self.scores,
self.class_ids, mask_alpha, mask_maps=self.mask_maps)
def get_input_details(self):
model_inputs = self.session.get_inputs()
self.input_names = [model_inputs[i].name for i in range(len(model_inputs))]
self.input_shape = model_inputs[0].shape
self.input_height = self.input_shape[2]
self.input_width = self.input_shape[3]
def get_output_details(self):
model_outputs = self.session.get_outputs()
self.output_names = [model_outputs[i].name for i in range(len(model_outputs))]
@staticmethod
def rescale_boxes(boxes, input_shape, image_shape):
# Rescale boxes to original image dimensions
input_shape = np.array([input_shape[1], input_shape[0], input_shape[1], input_shape[0]])
boxes = np.divide(boxes, input_shape, dtype=np.float32)
boxes *= np.array([image_shape[1], image_shape[0], image_shape[1], image_shape[0]])
return boxes
if __name__ == '__main__':
model_path = "yolov8n-seg.onnx"
# Initialize YOLOv8 Instance Segmentator
yoloseg = YOLOSeg(model_path, conf_thres=0.3, iou_thres=0.5)
img = cv2.imread('1.jpg')
# Detect Objects
yoloseg(img)
# Draw detections
combined_img = yoloseg.draw_masks(img)
cv2.imwrite("Output.jpg", combined_img)
# cv2.namedWindow("Output", cv2.WINDOW_NORMAL)
# cv2.imshow("Output", combined_img)
# cv2.waitKey(0)
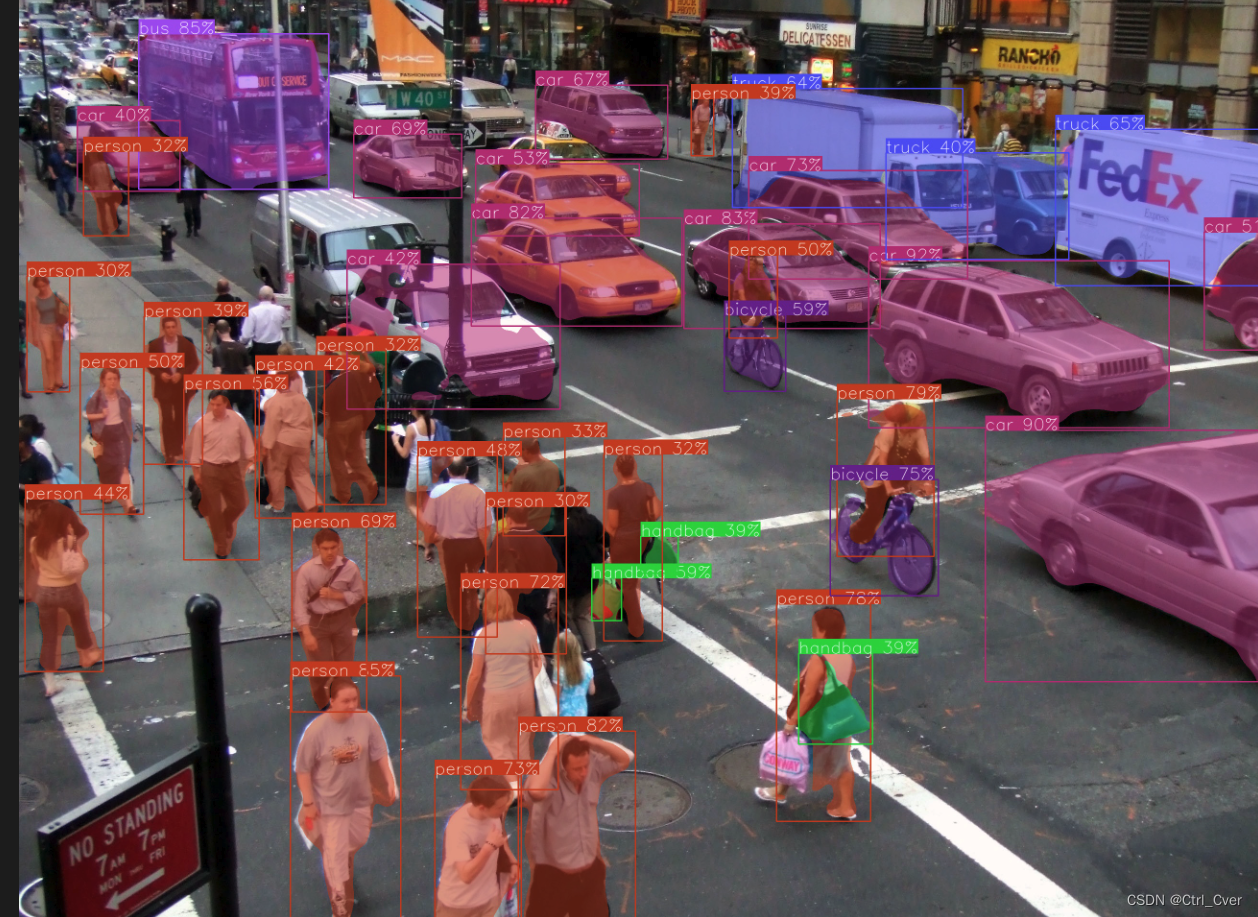
3. 输出
文章来源:https://blog.csdn.net/qq_33596242/article/details/135223386
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!