MATLAB将动画演示以及将过程保存为gif动态图片
平时想要做一个动画图片来演示,本人一般有两种方法:
一种是截很多张图之后,将这些图片合成为一张gif动画;
另一种就是录屏再制作成gif,我一般是录下视频之后,使用QQ影音,里面的影音工具箱有一个制作动画的功能。
这两种方法都比较繁琐,尤其是第一种需要慢慢截自己需要的图,所以这里介绍一种在MATLAB中使用代码来保存整个动画演示过程的gif图片的方法,这样就方便很多了。
1、机器人教学
依然使用p560六轴机械臂机器人来演示,首先就是加载机器人:
startup_rvc
mdl_puma560
没有下载MATLAB,想要学习的可以查阅:MatLab的下载、安装与使用(亲测有效)
需要研究机器人的,需要下载机器人工具包:MATLAB的rvctools工具箱熟悉运动学【机械臂机器人示例】
我们使用前面学过的运动学的正解确定起始位姿和目标位姿,规划出一条运动轨迹,然后画出来:
t=[0:0.05:2];%两秒完成轨迹,步长0.05
T1 = p560.fkine(qz);%起始位姿,qz零角度
%T2 = p560.fkine(qn)
T2 = p560.fkine([pi/2 pi/3 pi/6 0 0 0]);%目标位姿
J = p560.jtraj(T1,T2,t);%生成轨迹
p560.plot(J)接下来我们就是将这个演示的动画给保存起来,制作成一个gif的动画:
%制作动画
filename = 'demo.gif';
for i = 1:length(t)
pause(0.01)
p560.plot(J(i,:));
f = getframe(gcf); %gcf获取当前图窗的句柄,getframe捕获坐标区或图窗作为影片帧
imind = frame2im(f); %返回与影片帧关联的图像数据
[imind,cm] = rgb2ind(imind,256); %将 RGB 图像转换为索引图像
if i == 1
imwrite(imind,cm,filename,'gif', 'Loopcount',inf,'DelayTime',0.1);
else
imwrite(imind,cm,filename,'gif','WriteMode','append','DelayTime',0.1);
end
end
制作动画的过程就是将动画的每一帧写入到gif这个动画图片里面去,原理如下:
开启动画演示,使用?gcf?函数获取当前图窗的句柄,然后通过?getframe?函数来捕获坐标区或图窗作为影片帧,再使用?frame2im?函数返回与影片帧关联的图像数据,以及使用 rgb2ind 函数将 RGB 图像转换为索引图像(此 MATLAB 函数 使用最小方差量化和抖动将 RGB 图像转换为索引图像 X。map 最多包含 n 个颜色。n 必须小于或等于 65,536。)
最后使用 imwrite 函数将图像数据写入图形文件中,这里是动画所以会一直不断的写入动态的图像数据到gif文件中。
另外这里面的for循环和if的用法,需要注意的是都需要end来匹配结束。
2、幂函数
x的一次方到x的6次方的动画演示:
x = -2:0.01:2;
n = 1:1:6;
filename = 'demo1.gif'
for i = 1:length(n)
y = x.^(n(i));
plot(x,y,'r','LineWidth',1)
title(['y = x^' num2str(n(i))])
drawnow
frame = getframe(gcf);
im{i} = frame2im(frame);
[A,map] = rgb2ind(im{i},256);
if i == 1
imwrite(A,map,filename,'gif','LoopCount',Inf,'DelayTime',1);%每帧播放时间
else
imwrite(A,map,filename,'gif','WriteMode','append','DelayTime',1);
end
end ?
?
3、正弦函数
filename = 'demo2.gif'
for i = 1:4
x = 0:0.1:2*pi*i;
y = sin(x);
plot(x,y,'r','LineWidth',1)
title('y = sinx')
drawnow
frame = getframe(gcf);
im{i} = frame2im(frame);
[A,map] = rgb2ind(im{i},256);
if i == 1
imwrite(A,map,filename,'gif','LoopCount',Inf,'DelayTime',1);%每帧播放时间
else
imwrite(A,map,filename,'gif','WriteMode','append','DelayTime',1);
end
end?
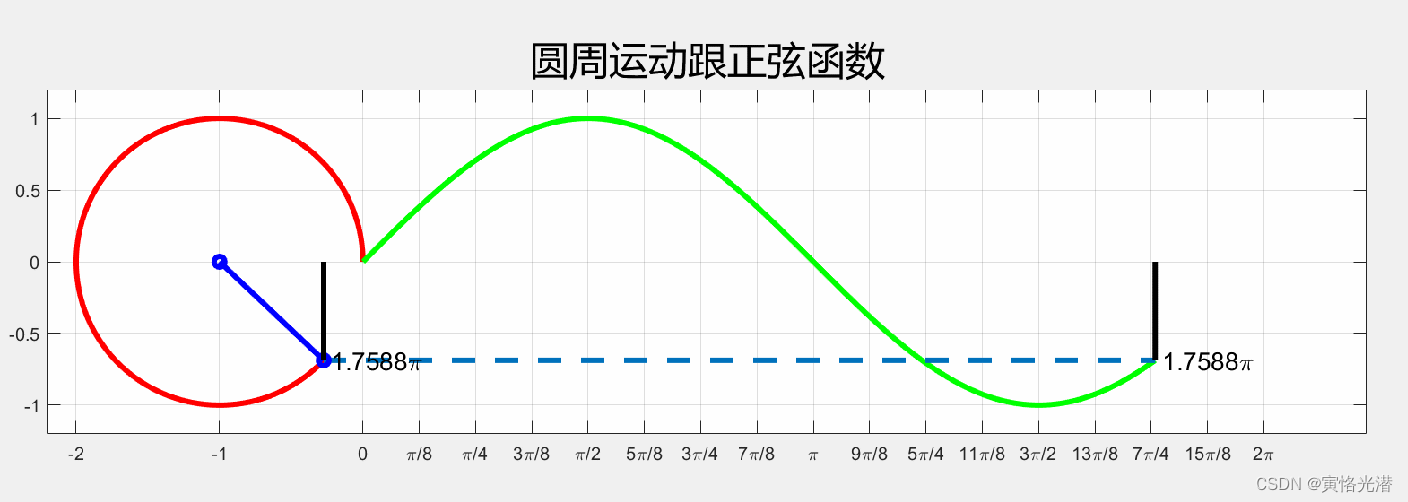
4、圆与正弦函数
圆周运动与正弦函数的关系(0到2π的一个圆也是正弦函数一个周期),所以三角函数也叫做圆函数,最初就是圆上的点做的运动而形成的轨迹吧。
theta = linspace(0,2*pi,200);
%圆的坐标
x = cos(theta)-1;
y = sin(theta);
%正弦函数坐标
x1 = theta;
y1 = sin(x1);
for i = 1:length(theta)
set(gcf,'outerposition',get(0,'screensize'));%全屏
%圆和正弦函数之间的连接线
connectLineX = linspace(x(i),x1(i),50);
connectLineY = zeros(1,50)+y(i);
AxisX = linspace(-2,10,50);
AxisY = zeros(1,50);
%圆中的箭头
arrowX = [-1,x(i)];
arrowY = [0,y(i)];
%圆周上的点到横轴的垂线
lineX = zeros(1,20)+x(i);
lineY = linspace(0,y(i),20);
%正弦函数上的点到横轴的垂线
x3 = zeros(1,20)+x1(i);
y3 = linspace(0,y1(i),20);
%画图
plot(x(1:i),y(1:i),'r',x1(1:i),y1(1:i),'g',connectLineX,connectLineY,'--',arrowX,arrowY,'-bo',lineX,lineY,'k',x3,y3,'k','LineWidth',3);
text(x(i)+0.05,y(i),strcat(num2str(theta(i)/pi),'\pi'),'fontsize',14);
text(x1(i)+0.05,y1(i),strcat(num2str(theta(i)/pi),'\pi'),'fontsize',14);
grid on
axis equal
axis([-2.2 7 -1.2 1.2])
set(gca,'XTick',[-2,-1,0:pi/8:2*pi]);
set(gca,'xtickLabel',{'-2','-1','0','\pi/8','\pi/4','3\pi/8','\pi/2','5\pi/8','3\pi/4','7\pi/8','\pi','9\pi/8','5\pi/4','11\pi/8','3\pi/2','13\pi/8','7\pi/4','15\pi/8','2\pi'});
title('圆周运动跟正弦函数','fontsize',22,'fontname','微软雅黑')
drawnow
f=getframe(gcf);
imind=frame2im(f);
[imind,cm] = rgb2ind(imind,256);
if i == 1
imwrite(imind,cm,'sin.gif','GIF', 'Loopcount',inf,'DelayTime',0.02);
else
imwrite(imind,cm,'sin.gif','GIF','WriteMode','append','DelayTime',0.02);
end
end由于动画超过5M,上传不过,截个图如下:
PS画圆:
t=0:0.1:2*pi
x = cos(t);
y = sin(t);
plot(x,y)
或者
ezplot('x^2+y^2=1')本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!