1846_安全SPI
2023-12-14 09:50:37
Grey
全部学习内容汇总:GitHub - GreyZhang/g_embedded: some embedded basic knowledge.
1846_安全SPI
SPI是一种常见的通信方式,在汽车电子中比较常用。但是如果涉及到安全相关的设计,可能得考虑更多。而SPI协议本身没有很好的标准化,安全SPI是这方面的一个很好的解决方案。
之前用过一些SPI的通信,其实SPI也是我最初迈入嵌入式的时候接触到的通信的功能,算得上是一种让我感觉到亲近的一种通信方式。不过安全SPI之前还真没有注意过。过去的一段时间,参与过功能安全项目的开发设计,让我对安全这样的字眼有了一些直觉上的好奇。这次看到的这个安全SPI,应该可以继续丰富补充我在安全设计方面的一些常识性短板。
- SPI是摩托罗拉开发出来的,主要是用于短距离通信的同步串行通信。
- SPI并没有比常规的标准,因此各方面的开发可能种类会非常多,并且很多开发可能会重复性投入。
- 在汽车电子领域中,经常会有一个独立的SPI监控设备用来实现安全的功能。这样的功能通常是通过硬件实现的。

- 安全SPI可以应用于传感器、IC、ASICS以及MCU等,看起来应用的场景还是很全面的。

- 如果片选不使能的时候,MISO以及MOSI一般来说会进入到高阻态。
- 这里给出来了一个安暖气囊的例子,从这里看的确是有一个独立的监控器专门用来监控。如果这个只是一个监控,如何跟整个系统进行交互?这个会提供一些进入到MCU的新号?

SafeSPI对于SPI外设的供电并没有什么要求,可以是不同的。其实,这么看的话也可以是相同的。

- 这里进一步讲了对于供电的要求,要求SPI的接口的供电必须保持一致。从这里看,其实这个标准是为了实现新号的一致性而不是考虑电源的失效。
- 进一步考虑,其实如果一个外设的供电与SPI的供电是一起的,那么整个设计中全都采用相同的电源供电应该是满足的。

- 时序的规范上,应该至少要能够支持到10M时钟。如果是在汽车电子用,控制类的控制器中10M也不算低了。而且,这个规范把这个定义为了一个最低标准,这样整个规范的适用性应该很不错。
- 从网上也找到了一些芯片资料,采用了SafeSPI的标准,但是最大的时钟只支持5M。不排除之前的版本中对此要求可能低一些。

- 为了满足SCK以及MISO的新号负载电容范围,建议增加一个可以用户编程的驱动强度以及速率的配置项。
- 针对slave的设计,也有类似的要求,这里不做重复的整理。

- 这里提到的参数9是一个帧间延时参数,这个参数对于不通的通信模式要求是不一样的。如果是out of frame,这个时间是要长一些的。因为需要有一定的时间去准备数据。
- out of frame 以及 in frame 分别是一个什么概念之前是没有了解过的。结合这里的描述,应该是一个数据准备不需要时间,一个数据准备需要一定的时间。
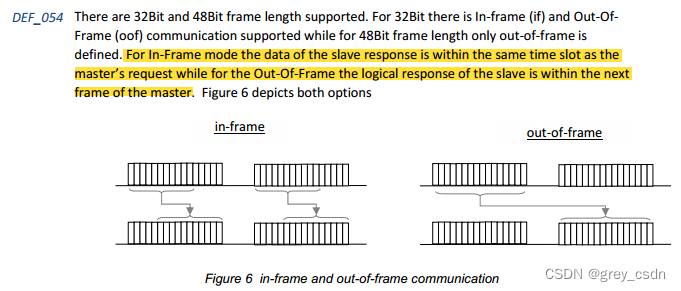
- SafeSPI 支持32bit以及48bit两种模式。
- 32bit模式支持 out of frame 以及 in frame 两种模式。但是48bit只支持 out of frame 模式。
- 关于 out of frame 以及 in frame 的解释这里有一个说明。看起来之前我理解的还是错误的, out of frame 的数据返回实在下一帧内。而我之前理解的是连续的数据传输中,需要一定的时间间隔准备数据。 in frame 的数据会在同一帧的数据之内做返回。
- 通过这里的信息看,其实 out of frame 以及 in frame 是指一个响应的模式,跟安全其实没有什么特别的关联。

- SafeSPI的数据格式定义为MSB。
- 对于 out of frame 的通信读取指令,CS的上升沿或者最后一个时钟相位新号作为从机数据准备的触发信号。
- 无论是32bit还是48bit的格式,数据帧的结构都是已经定义好了的。
- 如果从机接收到了无法识别的命令,应该按照规范中的应答格式进行响应回复。
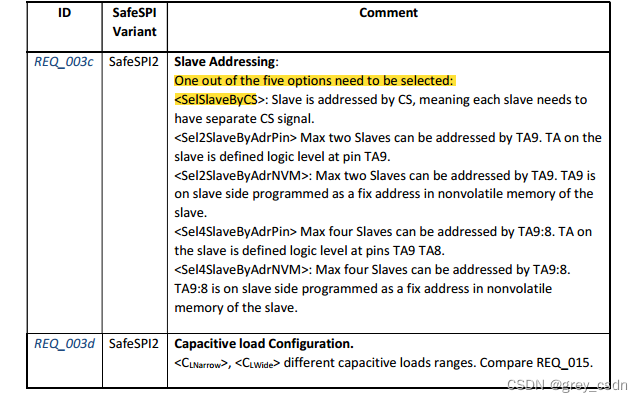
- SafeSPI中从机寻址有5种模式,第一种是采用CS的方式。剩下的4种需要结合一个TA数值,TA为 target address 的缩写。TA可能有1bit或者2bit,体现的形式可能是pin的配置也可能是从机中的NVM编程bit。这样,一共可以组合出来5种寻址模式。
- 按照TA的方式进行寻址的方式,让主机可以不用那么多的控制线就可以带最多4个从机。
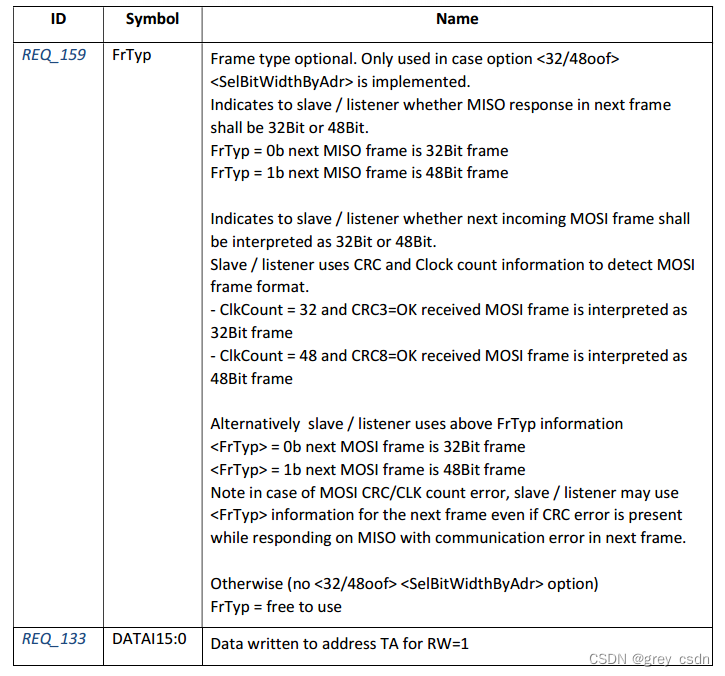
- 关于寄存器的bit定义,只看一下这个帧类型这部分。其他的部分可以结合具体的芯片在应用中继续做拆解分析。这类的这个帧类型,其实更多的是提示不同模式中下一帧的数据会是什么信息。

- SafeSPI协议中规定了一个CRC的校验,这样可以确保数据的可靠性。
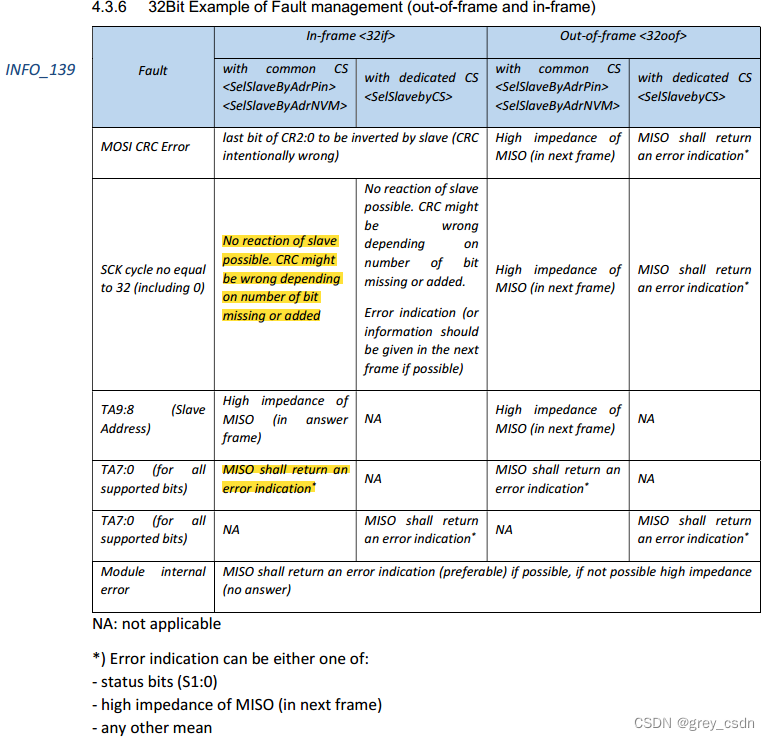
- 只是前面提到的一个错误处理的定义表。从表格中可以看得出来,并不是所有的错误都会有显式的响应。有时候,针对错误的输入可能是没有任何动作。
继续往后主要是48bit模式的一些说明,这个我感觉短时间内可能不会用到,暂且先不去做深一步的了解。不过从后面的信息浏览中至少是可以看得出来,48bit的CRC校验与32bit还是不一样的。此外,从机可能会同时支持32bit以及48bit两种模式。
随着科技的进步以及人们对于安全的重视,未来汽车电子中的功能安全设计肯定会被考虑的越来越多。针对类似的统一性标准做一下了解,对于未来面对随时可能出现的工程实施诉求还是有很大的帮助的。
文章来源:https://blog.csdn.net/grey_csdn/article/details/134986247
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!