超维空间M1无人机使用说明书——41、ROS无人机使用yolo进行物体识别
2024-01-08 14:24:54
引言:用于M1无人机使用的18.04系统,采用的opencv3.4.5版本,因此M1无人机只提供了基于yolov3和yolov4版本的darknet_ros功能包进行物体识别,识别效果足够满足日常的物体识别使用,如果需要更高版本的yolov7或者yolov8,可以参考博客的yolov7和yolov8的使用。
链接: 源码链接
一、启动darknet_ros物体识别
roslaunch robot_bringup bringup_darknet.launch
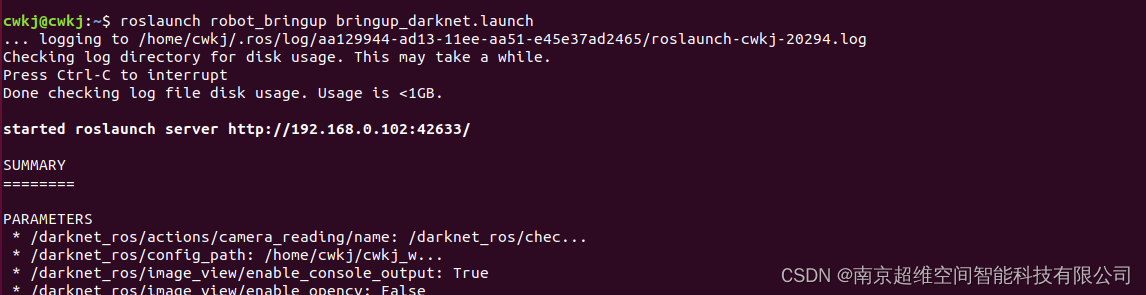

当终端无报错出现以上界面,表示物体识别正常运行
launch文件详解
1、bringup_darknet.launch文件分别启动了USB摄像头和darknet_ros节点,其中摄像头节点主要是发布图像话题,提供给darknet_ros节点订阅,相反,darknet_ros订阅图像话题,根据订阅到的图像数据进行识别处理
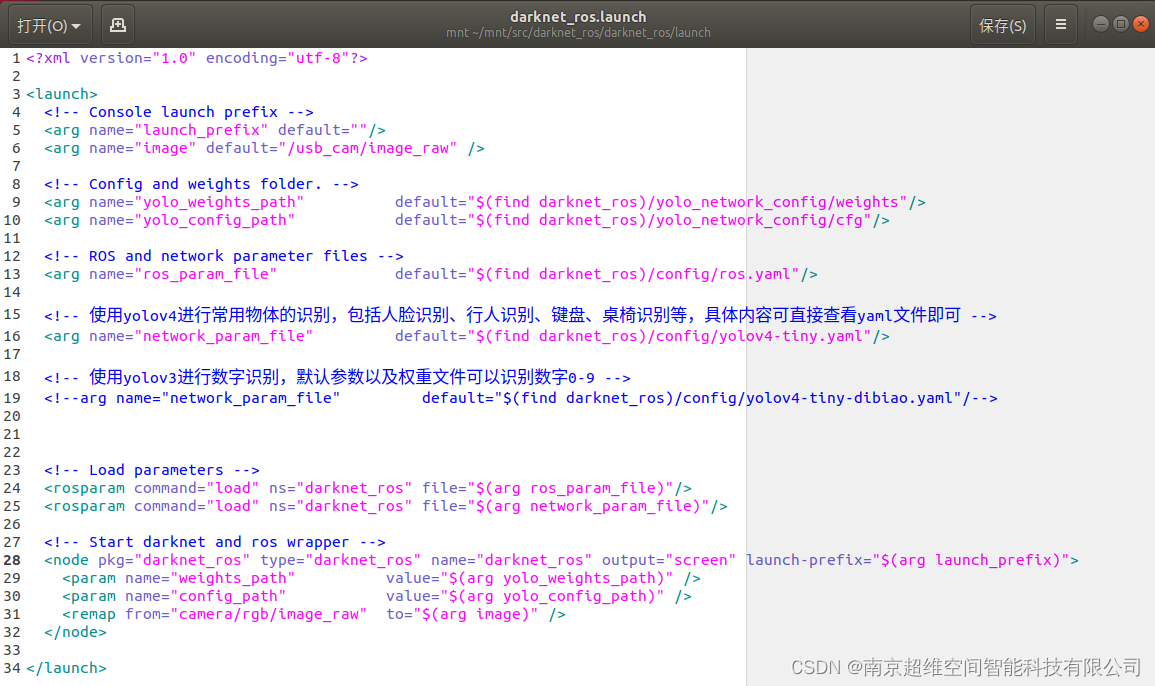
2、文件嵌套打开了darknet_ros.launch文件节点,这里需要注意,参数image是订阅的图像话题数据,一定要和摄像头发布的话题完全对应才可,否则darknet_ros节点会一直处在等待图像的状态
二、识别的物体模型
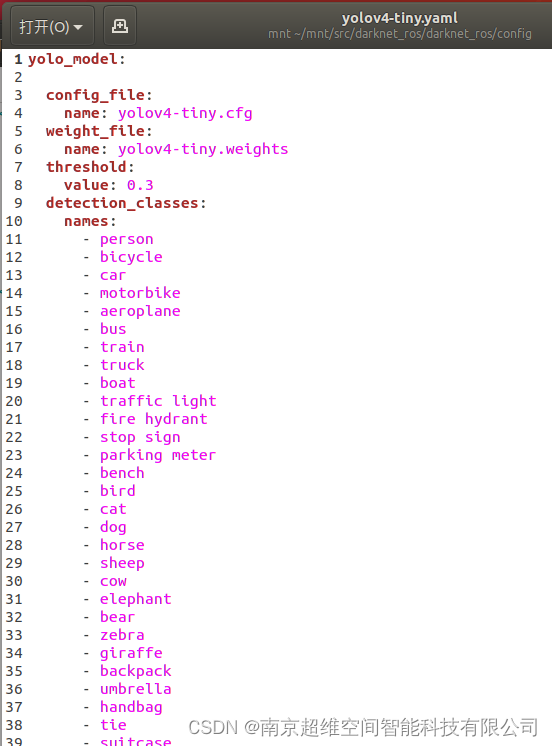
在例程中,我们加载了通用的物体模型,如下图所示,参数文件在路径
/home/cwkj/cwkj_ws/src/darknet_ros/darknet_ros/config下。

默认选择使用yolov4-tiny.yaml参数文件,如下所示,可以识别人、自行车、汽车等
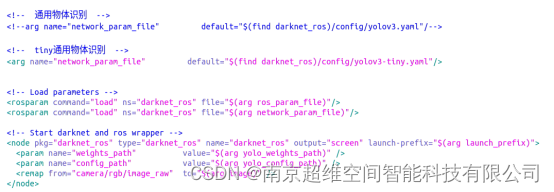
如果需要更改识别模型,只需要在启动文件中更换参数文件即可,我们只需要打开darknet_ros.launch文件,更换其中的参数文件即可
三、实例应用
步骤1、为了节约系统资源,可视化弹窗默认是关闭的,如果需要观看图片信息,可以使用rqt工具打开,如下:rqt_image_view
优先考虑在远程端使用rqt可视化工具
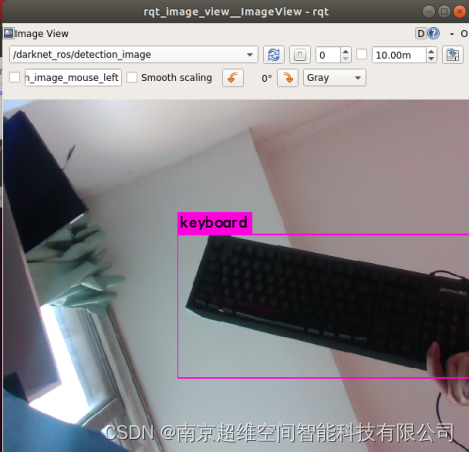
步骤2、识别到键盘,并且对键盘进行框选,需要按照如下话题选择
以下部分主要是针对深度摄像头,如D435,如果是USB摄像头,坐标转换节点是没法给出实际的坐标位置的,缺少深度信息,但是程序会给出识别道德目标物在摄像头画面中的相对位置信息
四、启动坐标转换节点,发布物体相对于摄像头的空间位置信息
只需要把其中的参数object_name改成参数文件中的物体名称即可识别指定物体并发布位置信息,例如键盘”keyboard”。

roslaunch object_darknet object_darknet.launch
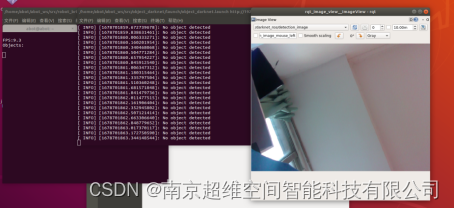
步骤1、未检测到键盘的时候,日志输出如下:
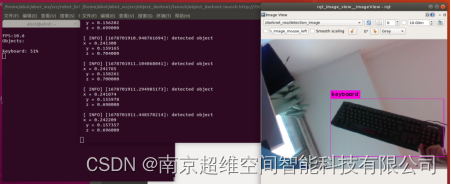
步骤2、识别到键盘,日志输出如下:发布键盘相对与摄像头的位置信息,包含深度信息
五、扩展
同样的,通过选择不同的参数文件,可以实现行人检测、人脸检测、以及其他的物体识别。
文章来源:https://blog.csdn.net/qq_35598561/article/details/135438000
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!