【物联网无线通信技术】WiFi从理论到实践(ESP8266)
文章从理论基础到具体实现完整的介绍了最常见的物联网无线通信技术:WiFi。
文章首先介绍了WiFi这种无线通信技术的一些基本概念,并针对其使用的802.11协议的基本概念与其定义的无线通信连接建立过程进行了简单的介绍,然后对WiFi开发常常涉及的无线功率以及天线相关的基础知识做了些介绍,最后以ESP8266为例,介绍了WiFi无线通信包括硬件以及嵌入式软件的实现。
目录
概述
HiFi是英语High-Fidelity的缩写,翻译为“高保真”,常见说HiFi的耳机能够高保真还原声音,而对于WiFii这个术语经常被误以为是指无线保真(Wireless Fidelity),但其实这个概念没有任何意义,仅仅作为这种无线通信技术的代号而已。
无线通信的本质是通过电磁波来传递数字信号,区别于物理连接的网线,无线设备相互通信是通过不同频段的电磁波。下图是无线主要的频段和用处。

WiFi的信号在2.4G和5G,由上图可知2.4G在UHF频段,波长为分米量纲。因为它是一种全世界公开通用使用的无线频段,并且使用这个频段不会受到限制,全球各种无线产品均可以使用这个频段。这就导致了2.4G非常拥挤,蓝牙,微波炉,zigbee(物联网设备),业余无线电等都在这个频段,所以日常生活中,2.4G的WiFi干扰非常严重。相对来说5G工作在SHF频段,属于厘米波。日常生活中干扰较少。主要的干扰源是雷达等。
无线在传输过程中。会被不同的材质吸收,导致信号的衰减,这是无线衰减的主要形式。一般来说,材质的密度越高,含有的金属越多,对无线信号的吸收越强烈。因为无线电的波粒二象性,会造成无线信号损耗的,还包括反射,散射,折射,衍射等,所以我们连接的无线信号,是经过这些复杂过程之后的综合结果。
5G的波长比2.4G小,波长越短,波峰和波谷离得越近,介质某一点附近电场的差异就越大,相应电流就越大,所以损耗在介质里的能量就越多,所以,相同前提条件下,在有电阻率的导体中,频率越高的电磁波,衰减得就越快。这就导致了5G的覆盖范围相对2.4G小很多。

我们国家支持的2.4G频段信道为1~13,无线设备通信选择合适的在频段中选择合适的信道进行通信。
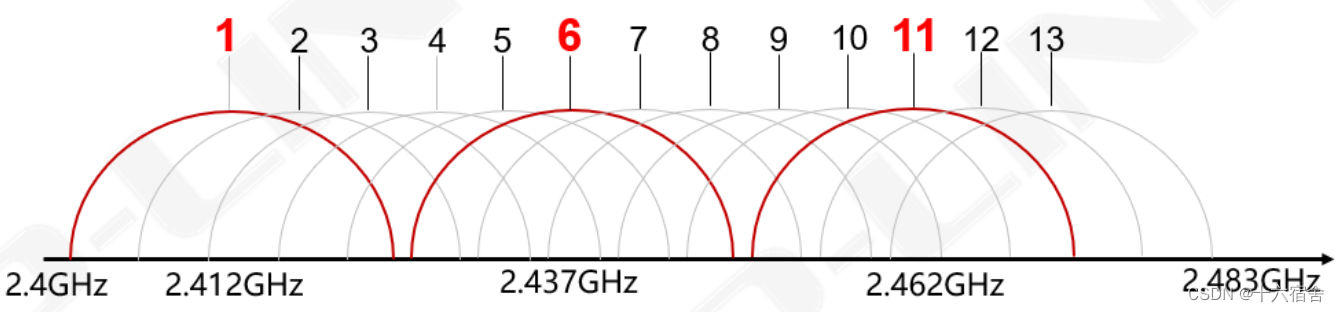
每个信道的有效带宽为20MHz,为了防止信道之间的干扰,增设强制隔离带,为2MHz,相邻两个信道的中心频率相差5MHz。2.4G在20MHz有效带宽的情况下,互不干扰的信道为(1、6、11),(2、7、12),(3、8、13)这三组组合。
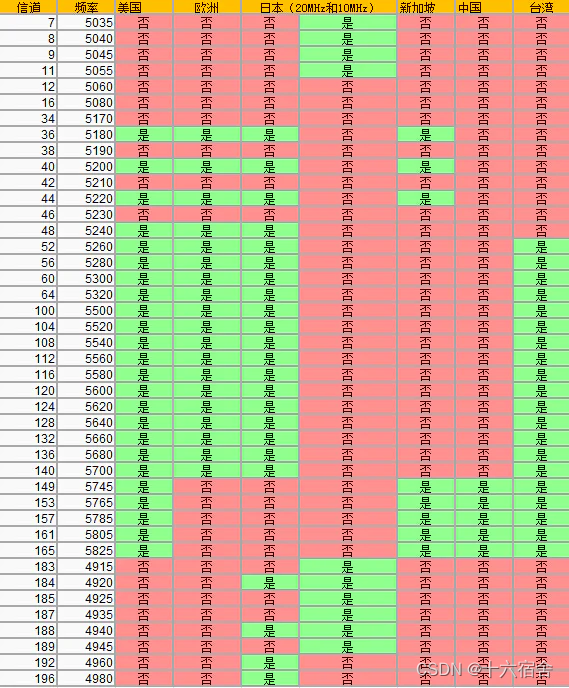
我国支持的5G频段是:36,38,40,42,44,46,48,149,153,157,161。
简而言之,2.4G相对5G覆盖范围,但5G信号频宽更宽,无线环境较为干净。如果终端(电视等)距离路由器比较近,周围障碍物少,建议连接5G,如果终端(手机等)距离路由器很远,障碍物多,根据情况可以选择2.4G。?
802.11标准?
基本概念
802.11标准定义了一些WiFi涉及的常用概念。
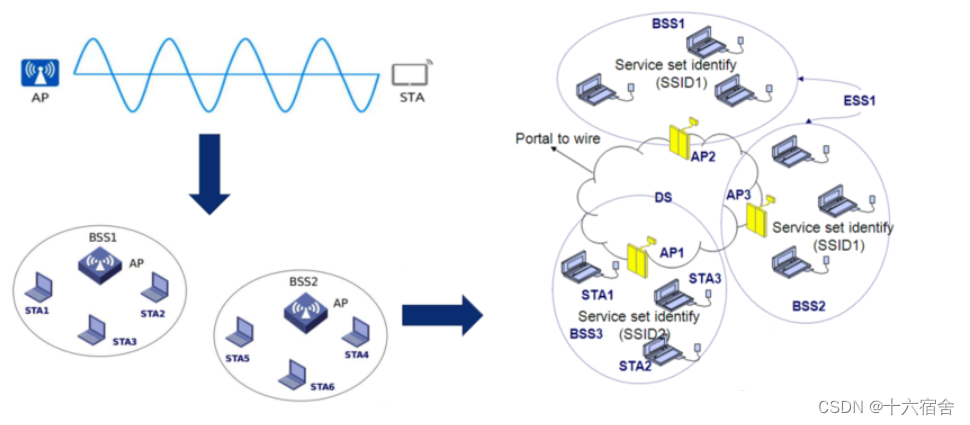
- AP(Access point):无线接入点,是一个无线网络的创建者,是网络的中心节点。 一般家庭或办公室使用的无线路由器就对应一个AP。
- STA(Station):任何一个接入无线AP的设备都可以称为一个站点。平板,手机,电脑等。
- BSS(Basic Service Set):基础服务集,一个AP的覆盖范围被称为一个 BSS。由一组彼此通信的工作站所构成。
- SSID(Service Set Identifier):每个无线AP都应该有一个标示用于用户识别,SSID就是这个用于用户识别的的名字,也就是我们经常说到的WiFi名。
- BSSID(Basic Service Set ID):唯一标识一个BSS,不同BSS下BSSID不同。BSSID本质是AP的MAC地址。
- ESS(Extended Service Set):扩展服务集,采用相同SSID的多个BSS形成的更大规模的虚拟BSS。要求两个BSS接入同一个DS,SSID相同,且BSS区域要有一定的重叠。
- ESSID(Ectended Service Set ID):扩展服务集标识,各BSS相同的SSID成了ESS的身份标识,用于对终端通告一个连续的WLAN。
无线连接建立
STA在进行通信之前,需要与AP建立连接。WiFi的连接流程主要分为:扫描、认证、关联、四次握手。根据不同的无线安全认证策略,决定是否进行第四步四次握手流程。
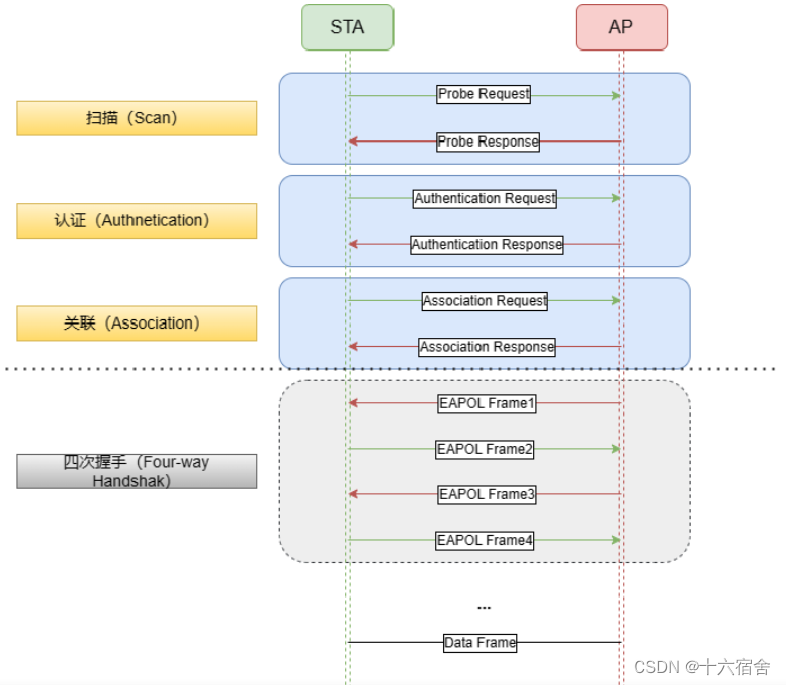
- 扫描(Scan):STA通过使用Scanning功能来完成新AP的发现。
?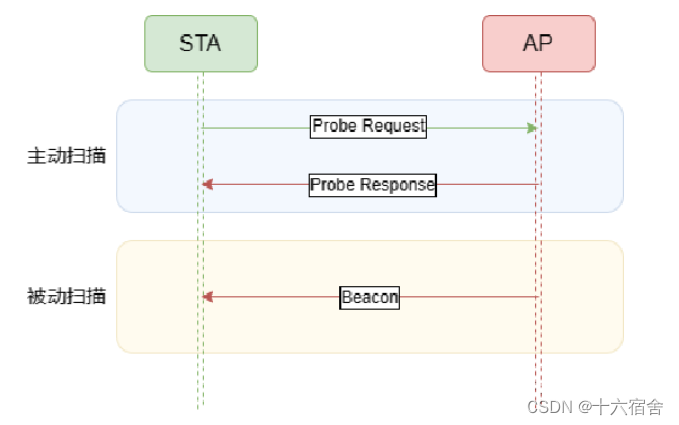
- 主动扫描(active scan) :STA在每一个信道上发送Probe request报文,从收到的Probe Response中获取BSS的基本信息以及AP的能力集,如BSSID、SSID、支持的速率、加密算法等 ,Probe Response包含的信息和Beacon帧类似的。
- 被动扫描(passive scan):STA通过在每个信道上侦听AP定期发送的Beacon帧来发现网络,Beacon帧中包含的该AP所属的BSS的基本信息以及AP的基本能力级,包括:BSSID、SSID、支持的速率、支持的认证方式,加密算法、Beacon帧发送间隔等。STA在收到对应的Beacon帧后就会进行判断,此AP是否是我们要找的AP以及对应的能力是否匹配以支持连接。
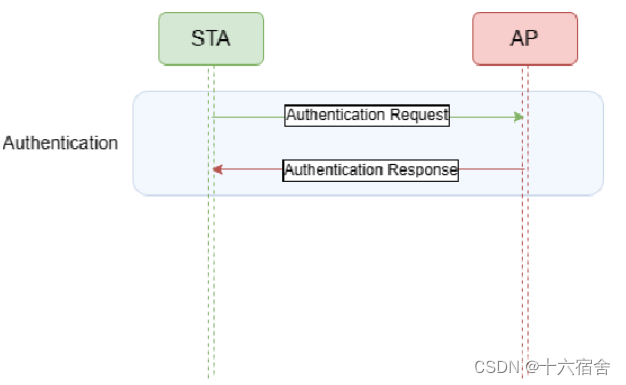
- 认证(Authentication):在扫描成功完成后,防止未授权的STA访问网络,在访问AP之前,需要先进行身份认证。
- ?开放系统认证(Open-System Authentication):等同于不需要认证,类似于我们家里的路由器不设定密码的情况。首先STA发送包含station ID(typically the MAC address)的authentication request,然后AP回复包含成功或失败的authentication response。
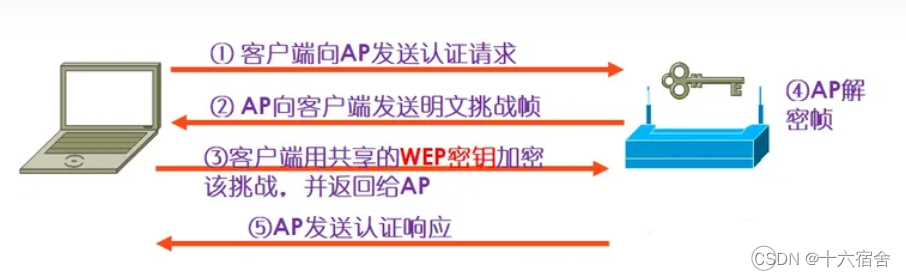
- 共享密钥认证(Shared-Key Authentication):共享密钥认证采用WEP验证客户端的身份,若使用WEP的话,STA与AP都要配置静态WEP密钥。WEP是最早的,最常用的,也是最脆弱的安全保证。AP随机产生一个challenge包(即一个字符串)发送给STA,STA将接收到的字符串拷贝到新的消息中,用密钥加密后再发送给AP。AP接收到该消息后,用密钥将该消息解密,然后对解密后的字符串和最初给STA的字符串进行比较。相同则通过认证,不相同则认证失败。
- ?开放系统认证(Open-System Authentication):等同于不需要认证,类似于我们家里的路由器不设定密码的情况。首先STA发送包含station ID(typically the MAC address)的authentication request,然后AP回复包含成功或失败的authentication response。
- ?关联(Association):当设备认证流程验证通过后,设备会再发起连接请求以关联AP设备。AP将用户信息添加到数据库,向用户回复关联响应,此过程也常被称为注册。这时如果AP采用的WPA-PSK/WPA2-PSK/WPA3等安全加密认证方式(对WEP的改进),那么此时设备还无法正常通信。设备还需要进行四次握手,以获取加密密钥。再正确获取加密密钥后,STA才能正常使用WiFi网络。
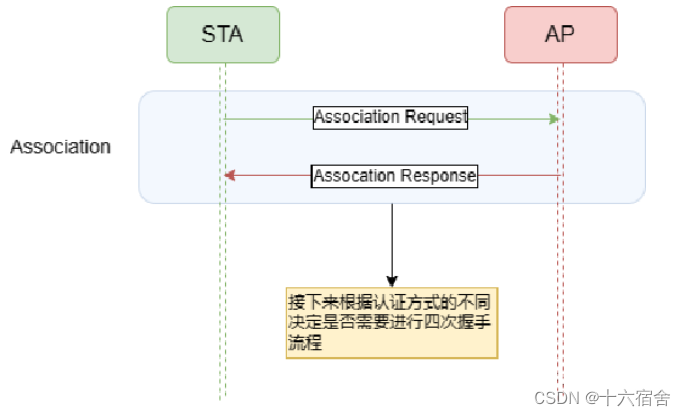
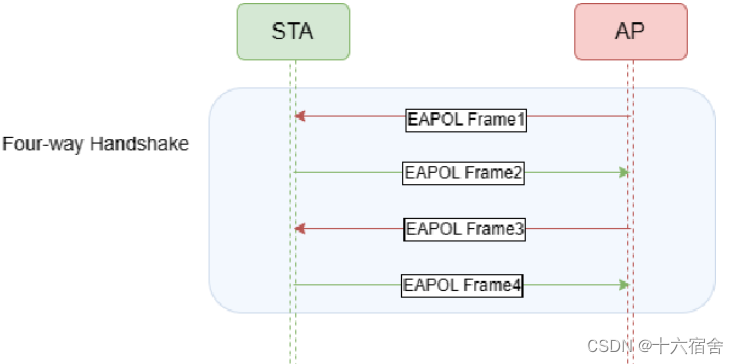
- 四次握手(Four-way handshake):当AP采用WPA-PSK、WPA2-PSK、WPA3等加密方式的情况下,当STA在成功收到AP的Association Response后。会继续进行四次握手流程,以获取用于单播帧加密的PTK,基于组播/广播帧加密的GTK。
如果对802.11协议感兴趣的朋友,可以自行搜索《802.11 Wireless Networks: The Definitive Guide》来进行协议的深入研究。

无线功率与天线
无线功率dB、dBm
dB是个相对值,它的使命就是把一个很大或者很小的数,用一个简短的形式表达出来。功率增大十倍,用dB表示为10dB.
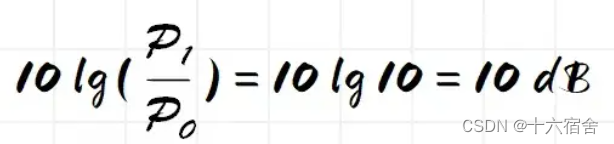
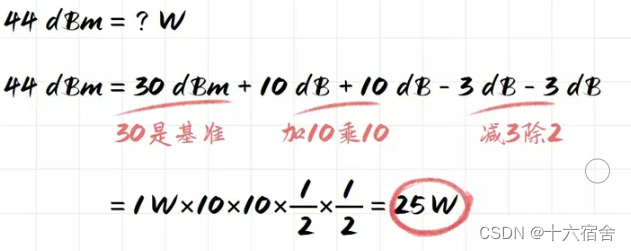
根据公式,如果P1/P0=2,则为3dB,+3dB表示增大为两倍,-3dB表示下降为1/2。这里我们记住一句话:加3dB相当于功率乘2,加10乘10;减3除2,减10除10。
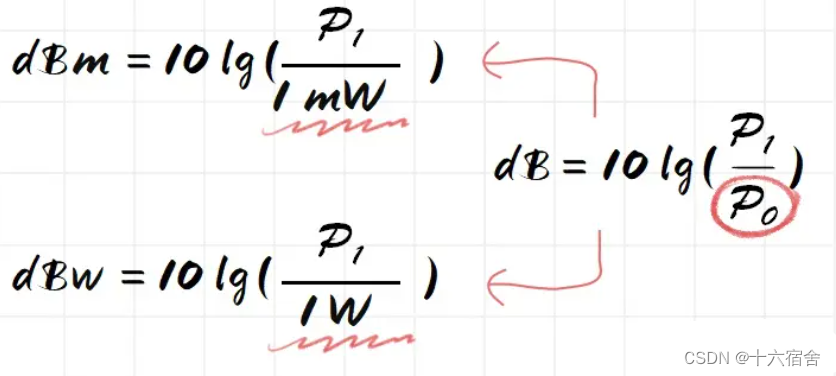
dBm、dBw就是把dB公式中的参考功率P0分别换成1mW、1W,它们是绝对值。WiFi信号强度的能量通常为mw级,因此业界将Wi-Fi信号大小表示为与1mw的强度比,用dbm来表示,他是一个绝对值。
功率换算表如下图:
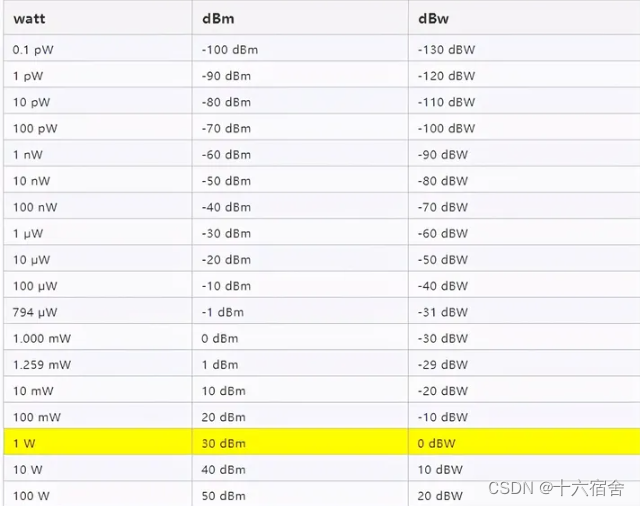
这里,我们记住1 W = 30 dBm。综合上边的知识,我们就可以得到44dBm等于多少W的功率。
天线与增益?
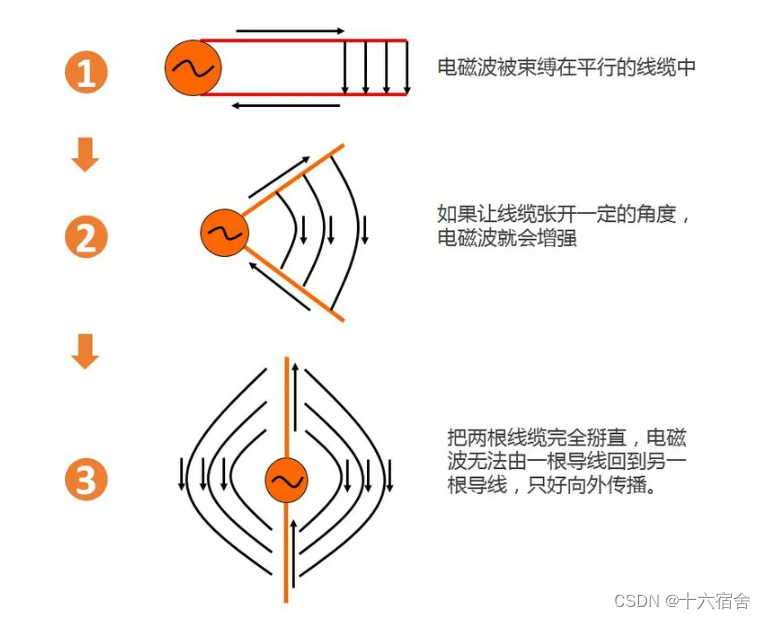
天线是怎样把这些电磁波发送出去的呢?根据麦克斯韦电磁场理论,“变化的电场产生磁场,变化的磁场产生电场”,这样不断激发下去,就实现了无线信号的传播。如下图所示,如果两导线的距离很近,感应电场被束缚在两导线之间,因而向外辐射很微弱,将两导线张开,电场就散播在周围空间,辐射增强。产生电场的这两根直导线,就叫做振子。通常两臂长度相同,所以叫对称振子。
无线电波在空间传播时,其电场方向是按一定的规律而变化的,这种现象称为无线电波的极化。?
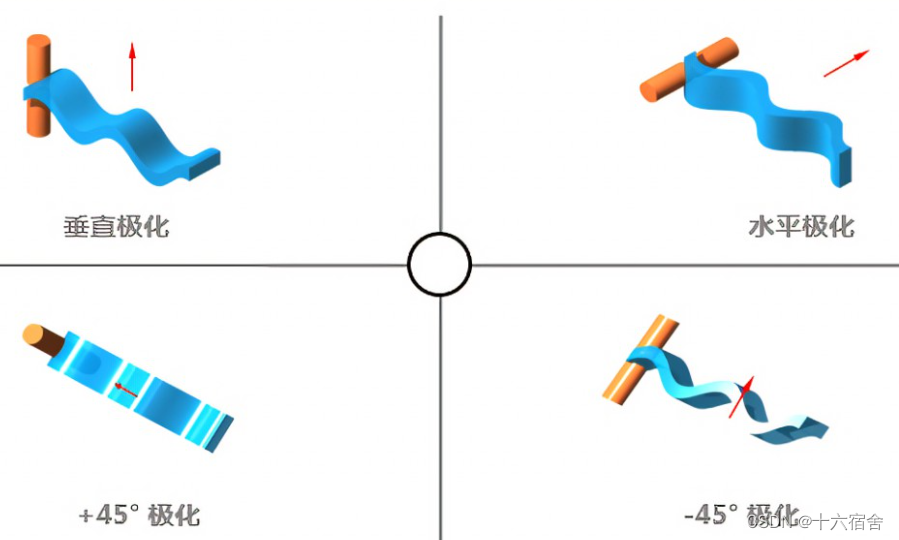
天线在进行辐射的时候,与电磁场强度的方向,一般为垂直极化和水平极化两种。水平极化由于受大地磁场影响,损耗较大,较少采用,单极化天线一般采用垂直极化天线。通常情况下,在天线增益最大指向对准的情况下,接收天线只能接收与发射天线极化相同的电磁波,这称之为极化匹配。
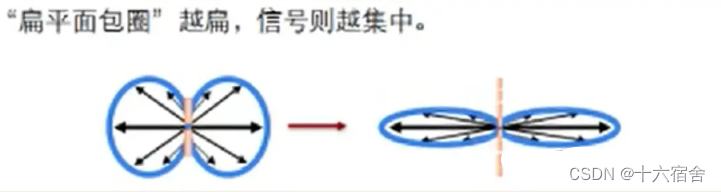
在相同功率下,增益越多,天线的定向性越强,定向角度越小。增益值的单位是dbi。天线的增益指的是在最大的辐射方向上,与无方向的理想点源相比,把输入功率放大的倍数。全向天线的信号强度图,为下图面包圈的样子。
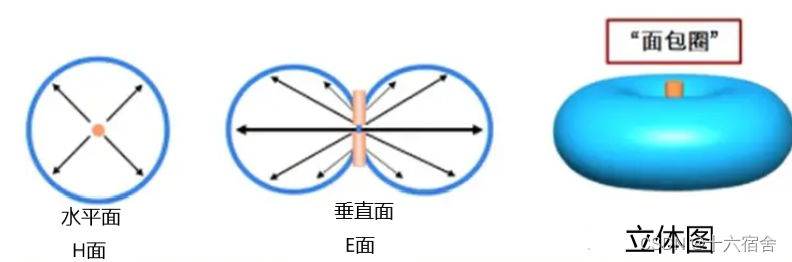
增益后,面包圈变得更扁平,增加了覆盖的范围。能量更集中,水平方向上信号越强,抗干扰能力越强,在某些方向上信号减弱。
STM32+ESP8266实现数据透传
选型
能够实现无线通信的WiFI模组众多,下面我们介绍几款国内常见的WiFi芯片厂商对应的模组。
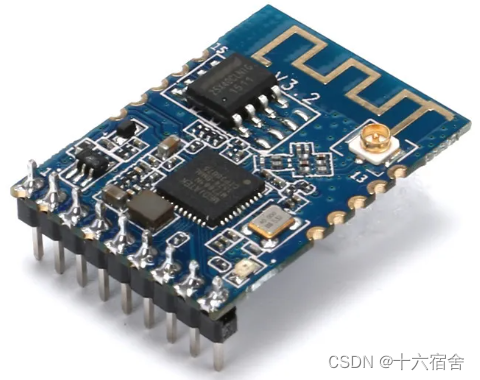
- 联发科(MT7681):联发科技MT7681是针对物联网设备设计的Wi-Fi系统单芯片(SoC),体积精巧,内建TCP/IP协议,采用MT7681的物联网设备可通过Wi-Fi连接到其他智能设备或使用云端应用服务。此款芯片提供AP模式与STA的双重连接功能,具备5个GPIO针脚和1个UART端口,可智能化控制设备,同时支持PWM接口。下图为其对应模组M35。
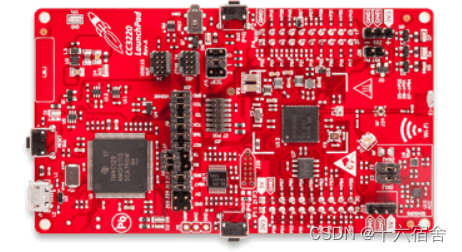
- 德州仪器(CC3200): 针对物联网 (IoT) 应用的 SimpleLink CC3200 器件是一款集成了高性能ARM Cortex-M4 MCU的无线MCU,从而使得客户能够用单个集成电路 (IC) 开发整个应用用。 借助片内稳健安全的WiFi协议,无需经验即可实现更开速的开发。包含多种外 设,其中包括一个快速并行摄像头接口,I2S,SD/MMC,UART,SPI,I2C 和四通道模数转换器 (ADC)。下图为Ti提供的评估板。
- 乐鑫(ESP8266):?ESP8266EX 集成了32位Tensilica处理器、标准数字外设接口、天线开关、射频 balun、功率放大器、低噪放大器、过滤器和电源管理模块等,仅需很少的外围电路,可将所占 PCB 空间降低。ESP8266EX 专为移动设备、可穿戴电子产品和物联网应用而设计,通过多项专有技术实现了超低功耗。ESP8266EX 具有的省电模式适用于各种低功耗应用场景。支持实时操作系统 (RTOS) 和 Wi-Fi 协议栈,可将高达 80% 的处理能力留给应用编程和开发。
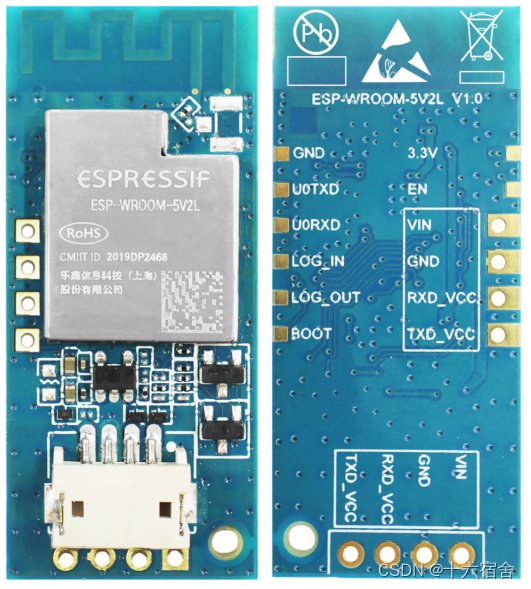
这里我们使用国产的ESP8266来实现数据透传。
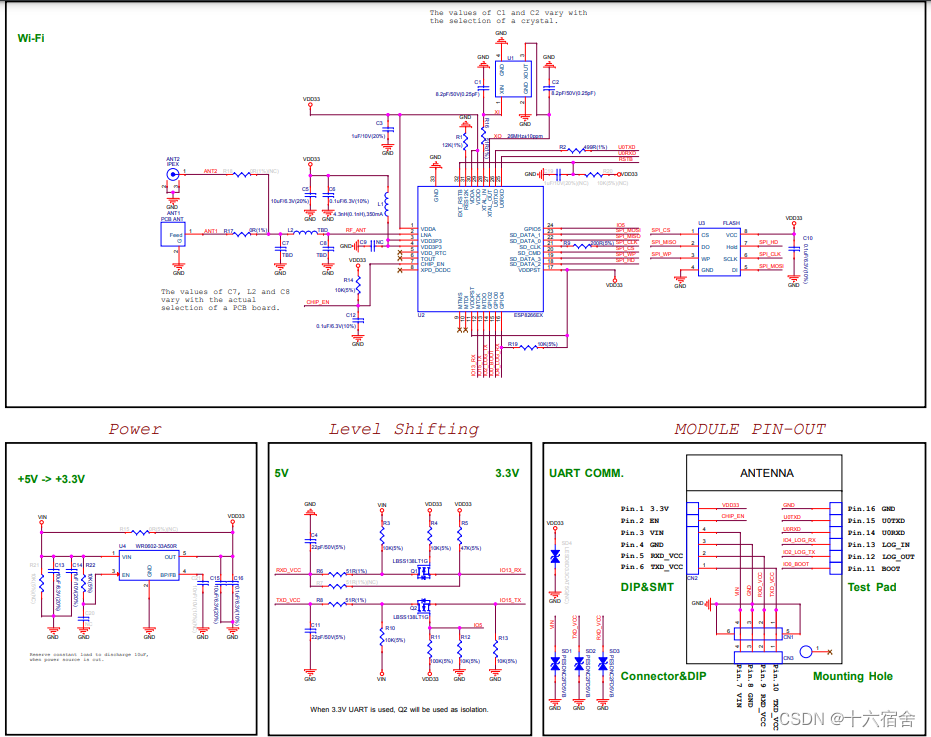
原理?
模组原理图分为四个部分,主要的Wi-Fi部分IC为ESP8266,26MHz晶振输入,SPI外界一个Flash,还包含射频天线部分。Power部分由5V供电通过LDO转为3.3给ESP8266供电。电平转化部分对3.3V的串口TTL电平转化为5V。最有是模块对外引脚部分。
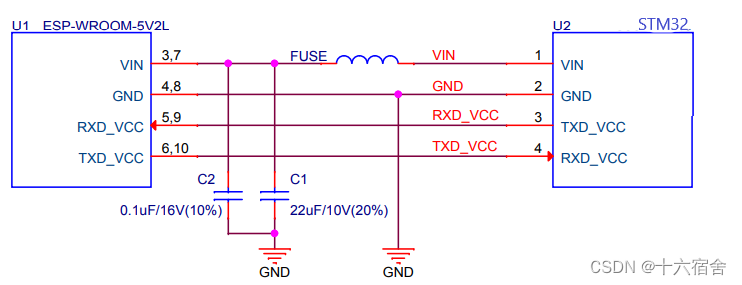
STM32与模组串口相连即可。
嵌入式软件?
嵌入式软件的功能主要是通过串口对模组发送AT指令完成模组配置,将ESP32模组作为TCP客户端,建立单连接,实现 UART至Wi-Fi透传。简单流程如下,商用的话还需要考虑一些故障诊断,模式管理等。
- AT+CWMODE=1:设置工作模式(STA模式)。
- AT+RST:模块重启(生效工作模式)。
- AT+CWJAP="111","11111111":连接当前环境的AP(热点名,密码)。
- AT+CIPMUX=0:设置单路连接模式。
- AT+CIPSTART="TCP","xxx.xxx.xxx.xxx",xxxx:建立TCP连接。
- AT+CIPMODE=1:开启透传模式。
- AT+CIPSEND:透传模式下,传输数据。
- +++:退出透传模式。
我们使用的是STM32片内的串口3,初始化波特率为9600。
#include "delay.h"
#include "usart3.h"
#include "stdarg.h"
#include "stdio.h"
#include "string.h"
#include "timer.h"
//串口接收缓存区
u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN个字节.
u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
//通过判断接收连续2个字符之间的时间差不大于10ms来决定是不是一次连续的数据.
//如果2个字符接收间隔超过10ms,则认为不是1次连续数据.也就是超过10ms没有接收到
//任何数据,则表示此次接收完毕.
//接收到的数据状态
//[15]:0,没有接收到数据;1,接收到了一批数据.
//[14:0]:接收到的数据长度
vu16 USART3_RX_STA=0;
void USART3_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)//接收到数据
{
res =USART_ReceiveData(USART3);
if((USART3_RX_STA&(1<<15))==0)//接收完的一批数据,还没有被处理,则不再接收其他数据
{
if(USART3_RX_STA<USART3_MAX_RECV_LEN) //还可以接收数据
{
TIM_SetCounter(TIM7,0);//计数器清空 //计数器清空
if(USART3_RX_STA==0) //使能定时器7的中断
{
TIM_Cmd(TIM7,ENABLE);//使能定时器7
}
USART3_RX_BUF[USART3_RX_STA++]=res; //记录接收到的值
}else
{
USART3_RX_STA|=1<<15; //强制标记接收完成
}
}
}
}
//初始化IO 串口3
//pclk1:PCLK1时钟频率(Mhz)
//bound:波特率
void usart3_init(u32 bound)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //串口3时钟使能
USART_DeInit(USART3); //复位串口3
//USART3_TX PB10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10
//USART3_RX PB11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB11
USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口 3
USART_Cmd(USART3, ENABLE); //使能串口
//使能接收中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
//设置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
TIM7_Int_Init(1000-1,7200-1); //10ms中断
USART3_RX_STA=0; //清零
TIM_Cmd(TIM7,DISABLE); //关闭定时器7
}
//串口3,printf 函数
//确保一次发送数据不超过USART3_MAX_SEND_LEN字节
void u3_printf(char* fmt,...)
{
u16 i,j;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART3_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART3_TX_BUF); //此次发送数据的长度
for(j=0;j<i;j++) //循环发送数据
{
while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
USART_SendData(USART3,USART3_TX_BUF[j]);
}
}下面我们启动一个10ms的定时器,用来判断串口是否完成一次完整数据包的接收。
#include "timer.h"
extern vu16 USART3_RX_STA;
//定时器7中断服务程序
void TIM7_IRQHandler(void)
{
if (TIM_GetITStatus(TIM7, TIM_IT_Update) != RESET)//是更新中断
{
USART3_RX_STA|=1<<15; //标记接收完成
TIM_ClearITPendingBit(TIM7, TIM_IT_Update ); //清除TIM7更新中断标志
TIM_Cmd(TIM7, DISABLE); //关闭TIM7
}
}
//通用定时器7中断初始化,这里时钟选择为APB1的2倍
//arr:自动重装值 psc:时钟预分频数
//定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us.
//Ft=定时器工作频率,单位:Mhz
//通用定时器中断初始化
void TIM7_Int_Init(u16 arr,u16 psc)
{
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM7, ENABLE);//TIM7时钟使能
//定时器TIM7初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM7, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM7,TIM_IT_Update,ENABLE ); //使能指定的TIM7中断,允许更新中断
TIM_Cmd(TIM7,ENABLE);//开启定时器7
NVIC_InitStructure.NVIC_IRQChannel = TIM7_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}下面我们就根据上面提到的AT指令,来封装包括初始化为透传模式,发送数据,以及退出透传模式。远程服务器IP与端口号用xx来代替。
#include "esp8266.h"
#include "string.h"
#include "usart.h"
#include "usart3.h"
#include "stm32f10x.h"
#include "sys.h"
#include "delay.h"
//ESP8266模块和PC进入透传模式
void esp8266_start_trans(void)
{
//设置工作模式 1:station模式 2:AP模式 3:兼容 AP+station模式
esp8266_send_cmd("AT+CWMODE=1","OK",50);
//让Wifi模块重启的命令
esp8266_send_cmd("AT+RST","ready",20);
delay_ms(1000); //延时3S等待重启成功
delay_ms(1000);
delay_ms(1000);
delay_ms(1000);
//让模块连接上自己的路由
while(esp8266_send_cmd("AT+CWJAP=\"111\",\"11111111\"","WIFI GOT IP",600));
//=0:单路连接模式 =1:多路连接模式
esp8266_send_cmd("AT+CIPMUX=0","OK",20);
//建立TCP连接 这四项分别代表了 要连接的ID号0~4 连接类型 远程服务器IP地址 远程服务器端口号
while(esp8266_send_cmd("AT+CIPSTART=\"TCP\",\"xxx.xxx.xxx.xxx\",xxxx","CONNECT",200));
//是否开启透传模式 0:表示关闭 1:表示开启透传
esp8266_send_cmd("AT+CIPMODE=1","OK",200);
//透传模式下 开始发送数据的指令 这个指令之后就可以直接发数据了
esp8266_send_cmd("AT+CIPSEND","OK",50);
}
//ESP8266退出透传模式 返回值:0,退出成功;1,退出失败
//配置wifi模块,通过想wifi模块连续发送3个+(每个+号之间 超过10ms,这样认为是连续三次发送+)
u8 esp8266_quit_trans(void)
{
u8 result=1;
u3_printf("+++");
delay_ms(1000); //等待500ms太少 要1000ms才可以退出
result=esp8266_send_cmd("AT","OK",20);//退出透传判断.
if(result)
printf("quit_trans failed!");
else
printf("quit_trans success!");
return result;
}
//向ESP8266发送命令
//cmd:发送的命令字符串;ack:期待的应答结果,如果为空,则表示不需要等待应答;waittime:等待时间(单位:10ms)
//返回值:0,发送成功(得到了期待的应答结果);1,发送失败
u8 esp8266_send_cmd(u8 *cmd,u8 *ack,u16 waittime)
{
u8 res=0;
USART3_RX_STA=0;
u3_printf("%s\r\n",cmd); //发送命令
if(ack&&waittime) //需要等待应答
{
while(--waittime) //等待倒计时
{
delay_ms(10);
if(USART3_RX_STA&0X8000)//接收到期待的应答结果
{
if(esp8266_check_cmd(ack))
{
printf("ack:%s\r\n",(u8*)ack);
break;//得到有效数据
}
USART3_RX_STA=0;
}
}
if(waittime==0)res=1;
}
return res;
}
//ESP8266发送命令后,检测接收到的应答
//str:期待的应答结果
//返回值:0,没有得到期待的应答结果;其他,期待应答结果的位置(str的位置)
u8* esp8266_check_cmd(u8 *str)
{
char *strx=0;
if(USART3_RX_STA&0X8000) //接收到一次数据了
{
USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加结束符
strx=strstr((const char*)USART3_RX_BUF,(const char*)str);
}
return (u8*)strx;
}
//向ESP8266发送数据
//cmd:发送的命令字符串;waittime:等待时间(单位:10ms)
//返回值:发送数据后,服务器的返回验证码
u8* esp8266_send_data(u8 *cmd,u16 waittime)
{
char temp[5];
char *ack=temp;
USART3_RX_STA=0;
u3_printf("%s",cmd); //发送命令
if(waittime) //需要等待应答
{
while(--waittime) //等待倒计时
{
delay_ms(10);
if(USART3_RX_STA&0X8000)//接收到期待的应答结果
{
USART3_RX_BUF[USART3_RX_STA&0X7FFF]=0;//添加结束符
ack=(char*)USART3_RX_BUF;
printf("ack:%s\r\n",(u8*)ack);
USART3_RX_STA=0;
break;//得到有效数据
}
}
}
return (u8*)ack;
} 最后是main函数,用于完成字符串"12"的透传发送。
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "usart3.h"
#include "esp8266.h"
#include "string.h"
#include "timer.h"
/*
例程的主要内容:STM32配合ESP8266模块与服务器数据交互
ESP8266的连接:USART3(PB10、PB11)
如何判断数据接收完全?
1、出现了换行符。
2、如果超过10ms了都没有下一条数据(TIM7来进行10ms的定时)。
*/
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
usart3_init(115200); //串口初始化为115200
esp8266_start_trans(); //esp8266进行初始化
esp8266_send_data("12",50);
esp8266_quit_trans();
while(1)
{
}
}?十六宿舍 原创作品,转载必须标注原文链接。
?2023 Yang Li. All rights reserved.
欢迎关注?『十六宿舍』,大家喜欢的话,给个👍,更多关于嵌入式相关技术的内容持续更新中。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!