点云体素化
2024-01-08 14:07:29
环境:
Open3D
1.1 体素化介绍:
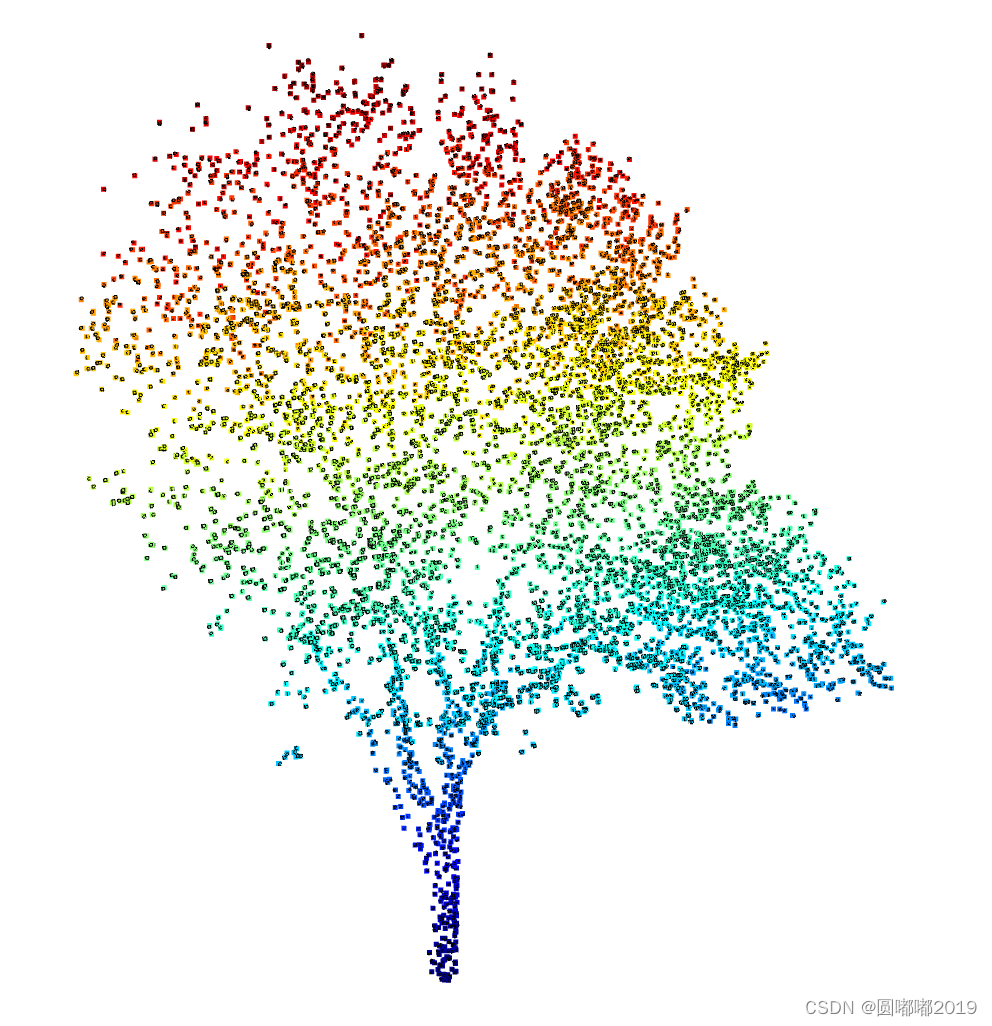
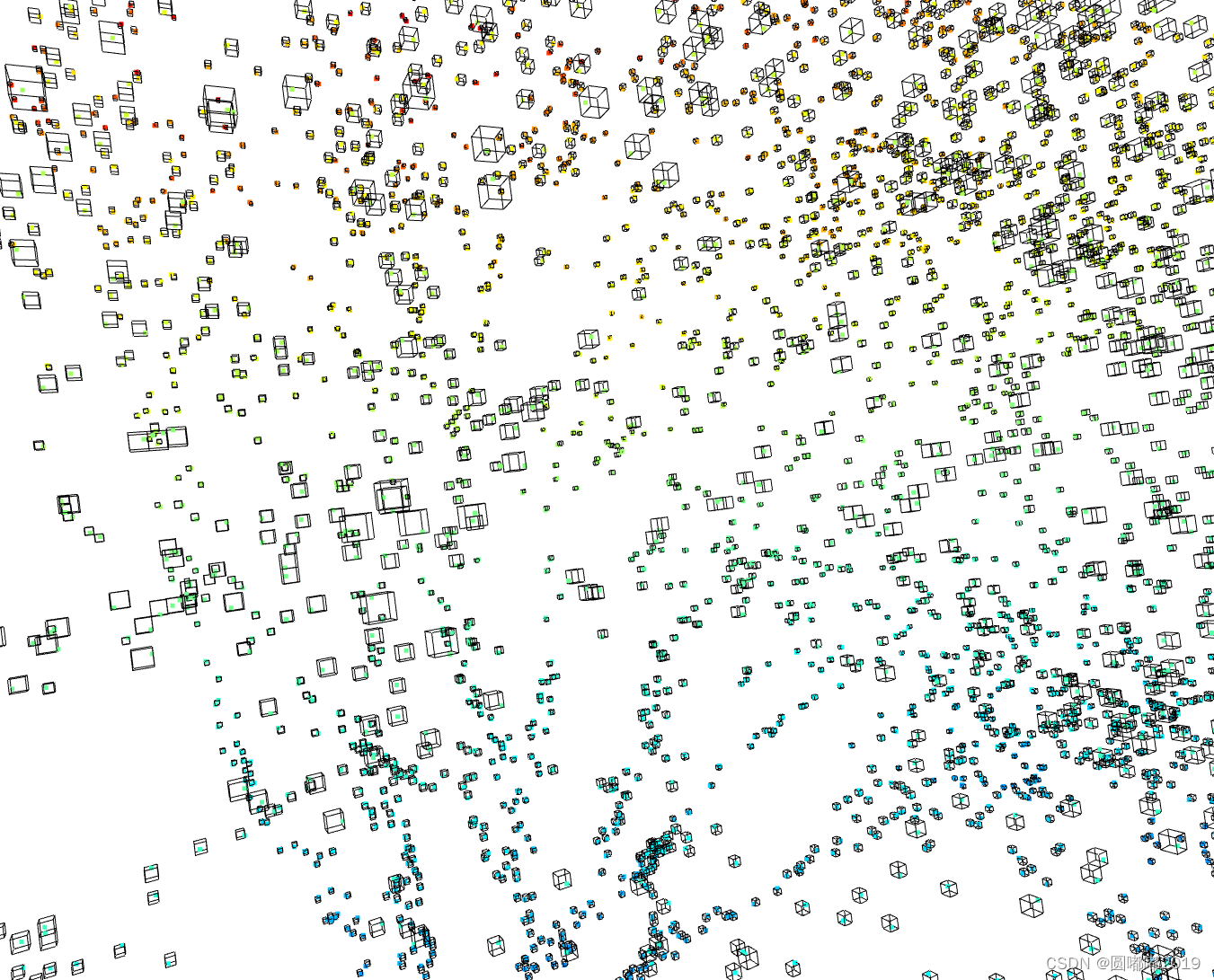
用一个个小体素去占据点云
2.1 python代码
conda activete deeplabv3plus(环境名称–安装好open3D的)
python demo.py
import open3d as o3d
import numpy as np
def draw_geometries(result, batch=False):
if not batch:
for i in range(len(result)):
o3d.visualization.draw_geometries([result[i]], "result", 800, 600, 50, 50, False, False, True)
else:
o3d.visualization.draw_geometries(result, "result", 800, 600, 50, 50, False, True, True)
def main():
result = []
# 读取数据
pcd = o3d.io.read_point_cloud("downsampled_pcd.pcd") # 替换为您的 .pcd 文件路径
# ------------------------------点云体素化处理-------------------------------
voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.05)
result.append(pcd)
result.append(voxel_grid)
draw_geometries(result, True)
if __name__ == "__main__":
main()
3.1 可视化
文章来源:https://blog.csdn.net/qq_42227760/article/details/135357164
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!