【倒立摆】仿真、起摆
建模
在此示例中,我们将考虑带有推车的倒立摆系统的二维版本,其中摆锤位于 被限制在垂直平面内移动,如下图所示。对于该系统,控制输入是水平移动小车的力
F
F
F,输出是摆的角位置KaTeX parse error: Undefined control sequence: \θ at position 1: \?θ?和小车的水平位置
x
x
x。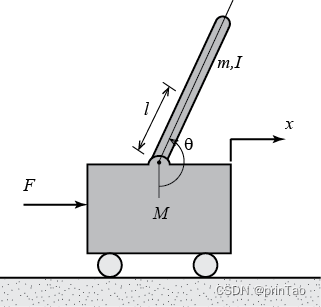
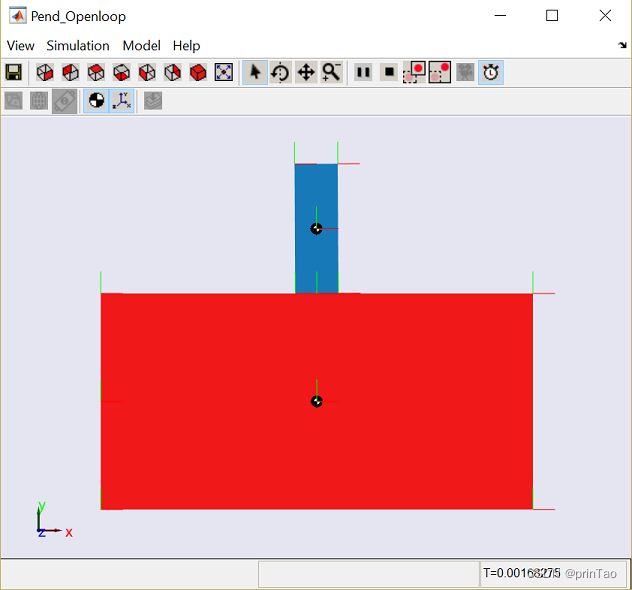
动画仿真
使用 Simulink 构建非线性模型
我们可以按照下面给出的步骤,使用上面推导的方程在 Simulink 中构建倒立摆模型。
首先在 MATLAB 命令窗口中输入 simulink 以打开 Simulink 环境。然后通过选择 New > 在 Simulink 中打开一个新模型窗口。 Simulink >打开的 Simulink Start Page 窗口的空白模型 或按 Ctrl- N。
插入 Simulink/用户定义函数库中的四个 Fcn 块。我们将使用这些模块构建 KaTeX parse error: Undefined control sequence: \点 at position 1: \?点?{x_d}、KaTeX parse error: Undefined control sequence: \点 at position 1: \?点?{\θ}、
P
P
P 和
N
N
N 的方程。
更改每个 Fcn 块的标签以匹配其关联的功能。
插入 Simulink/Continously 库中的四个 Integrator 模块。每个 Integrator 块的输出将是一个状态 系统变量:
x
x
x、KaTeX parse error: Undefined control sequence: \点 at position 1: \?点?{x}、KaTeX parse error: Undefined control sequence: \θ at position 1: \?θ? 和 KaTeX parse error: Undefined control sequence: \点 at position 1: \?点?{\θ}。
双击每个 Integrator 模块以添加关联状态变量的状态名称:。请参见下图示例。同时将 初始条件: KaTeX parse error: Undefined control sequence: \θ at position 1: \?θ?(摆角)更改为“pi”表示钟摆开始指向上方。
从 Simulink/Signal Routing 库中插入四个多路复用器 (Mux) 模块,每个 Fcn 模块一个。
分别从 Simulink/Sinks 和 Simulink/Sources 库插入两个 Out1 模块和一个 In1 模块。然后双击 在块的标签上更改名称。这两个输出用于“位置”。推车的形状和“角度”的 摆锤,而一个输入用于“力”。应用于购物车。
将 Mux 模块的每个输出连接到相应 Fcn 模块的输入。
将 KaTeX parse error: Undefined control sequence: \点 at position 1: \?点?{x_d} 和 KaTeX parse error: Undefined control sequence: \点 at position 1: \?点?{\θ} Fcn 模块的输出连接到两个连续的积分器,以生成小车的位置和摆锤的位置。 s 角。您当前的型号应该 现在出现如下。
现在我们将四个方程 (1)、(2)、(13) 和 (14) 中的每一个输入到 Fcn 块中。让我们从方程(1)开始 下面重复。
(15) x ¨ = 1 M ∑ c a r t F x = 1 M ( F ? N ? b x ˙ ) \ddot{x} = \frac{1}{M}\sum_{cart}F_x = \frac{1}{M}(F - N - b\dot{x}) x¨=M1?cart∑?Fx?=M1?(F?N?bx˙)
此方程需要三个输入:
u
(
1
)
=
F
u(1) = F
u(1)=F、
u
(
2
)
=
N
u(2) = N
u(2)=N 和 KaTeX parse error: Undefined control sequence: \点 at position 8: u(3) = \?点?{x}。双击相应的 Mux 模块并将 输入数量: 更改为“3”。
按照上一步中规定的顺序将这三个输入连接到该 Mux 块。
双击第一个 Fcn 块并输入 xddot 的方程,如下所示。
% 清除所有变量和命令窗口
clear all
clc
% 定义常数和变量
r = 0.006; % 轮子半径
M_c = 0.135; % 小车质量
I = 0.0007176; % 小车的转动惯量
l = 0.2; % 悬挂杆长度
g = 9.81; % 重力加速度
b = 0.00007892; % 电机摩擦系数
L = 0.046; % 悬挂杆质量中心到小车中心的距离
Rm = 12.5; % 电机电阻
kb = 0.031; % 电机反电动势常数
kt = 0.031; % 电机力矩常数
c = 0.63; % 粘滞阻尼系数
m = 0.1; % 悬挂杆质量
M = 0.136; % 小车和悬挂杆总质量
Er = 2*m*g*l; % 重力矩
n = 3; % 控制器状态维数
% 计算控制器参数
AA = I*(M+m) + M*m*(l^2);
aa = (((m*l)^2)*g)/AA;
bb = ((I +m*(l^2))/AA)*(c + (kb*kt)/(Rm*(r^2)));
cc = (b*m*l)/AA;
dd = (m*g*l*(M+m))/AA;
ee = ((m*l)/AA)*(c + (kb*kt)/(Rm*(r^2)));
ff = ((M+m)*b)/AA;
mm = ((I +m*(l^2))*kt)/(AA*Rm*r);
nn = (m*l*kt)/(AA*Rm*r);
% 构建系统动态矩阵 A 和控制输入矩阵 B
A = [0 0 1 0; 0 0 0 1; 0 aa -bb -cc; 0 dd -ee -ff];
B = [0; 0; mm; nn];
% 设计 LQR 控制器
% 定义不同的极点配置
p1 = [1i*2.8; -1i*2.8; 1i*1.5; -1i*1.5]; % 振荡
p2 = [-8+1i*2; -8-1i*2; -7+1i*2; -7-1i*2]; % 欠阻尼
p3 = [-8; -10; -4.5; -5.8]; % 稳定
p4 = [-20; -15.5; -45.5; -4.8]; % 快速或激进
% 使用极点配置法计算反馈增益矩阵
k = place(A, B, p3);
其中
r: 轮子半径。
M_c: 小车质量。
I: 小车的转动惯量。
l: 悬挂杆长度。
g: 重力加速度。
b: 电机摩擦系数。
L: 悬挂杆质量中心到小车中心的距离。
Rm: 电机电阻。
kb: 电机反电动势常数。
kt: 电机力矩常数。
c: 粘滞阻尼系数。
m: 悬挂杆质量。
M: 小车和悬挂杆总质量。
Er: 重力矩。
n: 控制器状态维数。
参考文献
https://www.google.com/search?q=Inverted+Pendulum+Swing-Up+simulink&newwindow=1&sca_esv=591835653&sxsrf=AM9HkKk6TB8MqLlcuT5XAlJZoKbG89r9Iw%3A1702901357054&ei=bTaAZfnpApng2roPkcGekAQ&ved=0ahUKEwi51OXz-ZiDAxUZsFYBHZGgB0IQ4dUDCBA&uact=5&oq=Inverted+Pendulum+Swing-Up+simulink&gs_lp=Egxnd3Mtd2l6LXNlcnAiI0ludmVydGVkIFBlbmR1bHVtIFN3aW5nLVVwIHNpbXVsaW5rSKMkUMUCWMIhcAB4ApABAJgBgQKgAaUPqgEFMC42LjS4AQPIAQD4AQHCAgQQABhHwgIEEAAYHuIDBBgAIEGIBgGQBgo&sclient=gws-wiz-serp
https://ww2.mathworks.cn/help/mpc/ug/swing-up-control-of-a-pendulum-using-nonlinear-model-predictive-control.html
https://github.com/jitendra825/Inverted-Pendulum
https://web.ece.ucsb.edu/~hespanha/ece229/references/AstromFurutaAUTOM00.pdf
https://ww2.mathworks.cn/matlabcentral/fileexchange/97187-inverted-pendulum-swing-up-lqr-control-design-simulation
https://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=SimulinkModeling
https://github.com/jitendra825/Inverted-Pendulum-Simulink
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!