ros2+gazebo建立机器人
Building your own robot

In this tutorial we will learn how to build our own robot in SDFormat. We will build a simple two wheeled robot.本文用SDF文件建立一个2轮机器人
You can find the finished SDF file for the tutorial?here.SDF文件点击下载
What is SDF

SDFormat?(Simulation Description Format), sometimes abbreviated as SDF, is an XML format that describes objects and environments for robot simulators, visualization, and control.
SDF格式文件是一个用来描述仿真时候的各种配置的文件
Building a world
We will start by building a simple world and then build our robot in it. Open a new file called?building_robot.sdf?and copy the following code to it.
<?xml version="1.0" ?>
<sdf version="1.10">
<world name="car_world">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="gz-sim-physics-system"
name="gz::sim::systems::Physics">
</plugin>
<plugin
filename="gz-sim-user-commands-system"
name="gz::sim::systems::UserCommands">
</plugin>
<plugin
filename="gz-sim-scene-broadcaster-system"
name="gz::sim::systems::SceneBroadcaster">
</plugin>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
</world>
</sdf>Save the file, navigate to the directory where you saved the file and launch the simulator:
gz sim building_robot.sdf
Note: You can name your file any name and save it anywhere on your computer.
You should see an empty world with just a ground plane and a sun light. Check?World demo?to learn how to build your own world.
Building a model
Under the?</model>?tag we will add our robot model as follows:
Defining the model
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose>Here we define the name of our model?vehicle_blue, which should be a unique name among its siblings (other tags or models on the same level). Each model may have one link designated as the?canonical_link, the implicit frame of the model is attached to this link. If not defined, the first?<link>?will be chosen as the canonical link. The?<pose>?tag is used to define the position and orientation of our model and the?relative_to?attribute is used to define the pose of the model relative to any other frame. If?relative_to?is not defined, the model's?<pose>?will be relative to the world.
Let's make our pose relative to the?world. The values inside the pose tag are as follows:?<pose>X Y Z R P Y</pose>, where the?X Y Z?represent the position of the frame and?R P Y?represent the orientation in roll pitch yaw. We set them to zeros which makes the two frames (the model and the world) identical.
Links forming our robot
Every model is a group of?links?(can be just one link) connected together with?joints.
Chassis

<link name='chassis'>
<pose relative_to='__model__'>0.5 0 0.4 0 0 0</pose>We define the first link, the?chassis?of our car and it's pose relative to the?model.
Inertial properties

<inertial> <!--inertial properties of the link mass, inertia matix-->
<mass>1.14395</mass>
<inertia>
<ixx>0.095329</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.381317</iyy>
<iyz>0</iyz>
<izz>0.476646</izz>
</inertia>
</inertial>Here we define the inertial properties of the chassis like the?<mass>?and the?<inertia>?matrix. The values of the inertia matrix for primitive shapes can be calculated using this?tool.
Visual and collision

<visual name='visual'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
<!--let's add color to our link-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>As the name suggests, the?<visual>?tag is responsible for how our link will look. We define the shape of our link inside the?<geometry>?tag as a?<box>?(cuboid) and then specify the three dimensions (in meters) of this box inside the?<size>?tag. Then, inside the?<material>?tag we define the material of our link. Here we defined the?<ambient>,?<diffuse>?and?<specular>?colors in a set of four numbers red/green/blue/alpha each in range [0, 1].
<collision name='collision'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
</collision>
</link>
</model>The?<collision>?tag defines the collision properties of the link, how our link will react with other objects and the effect of the physics engine on it.
Note:?<collision>?can be different from the visual properties, for example, simpler collision models are often used to reduce computation time.
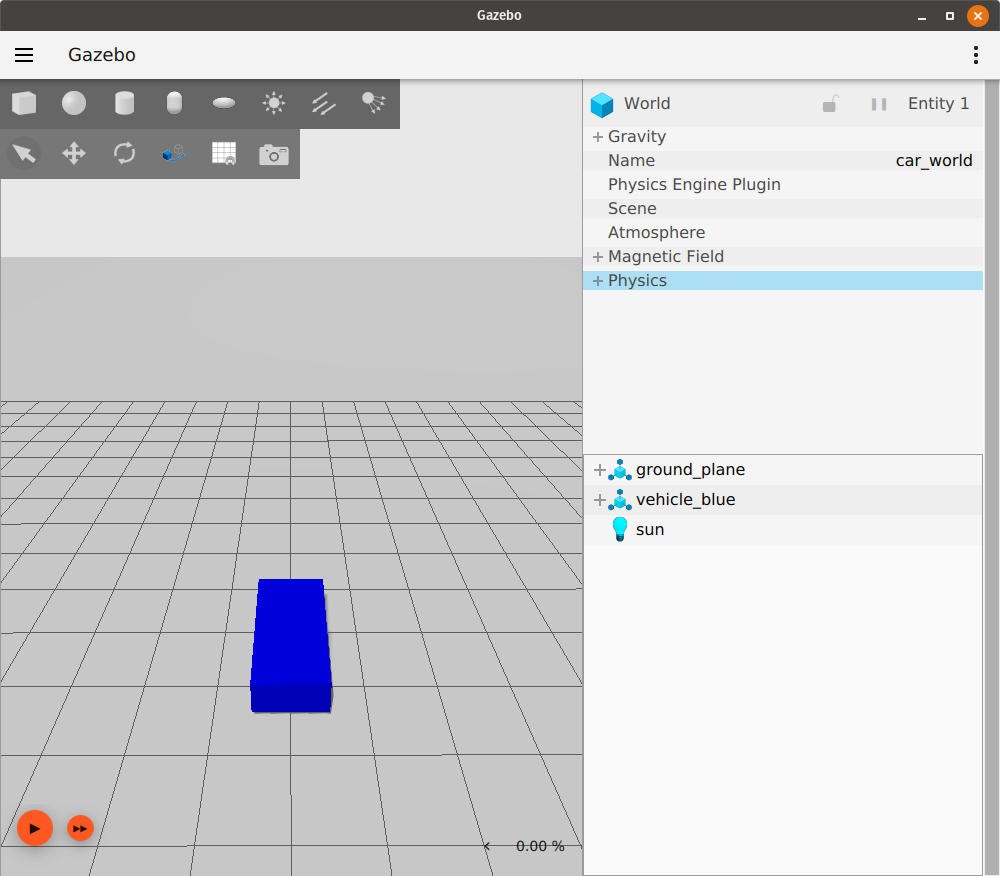
After copying all the parts above into the world file in order, run the world again:
gz sim building_robot.sdf
Our model should look like this:
In the top left toolbar, click the Translate icon, then select your model. You should see three axes like this:
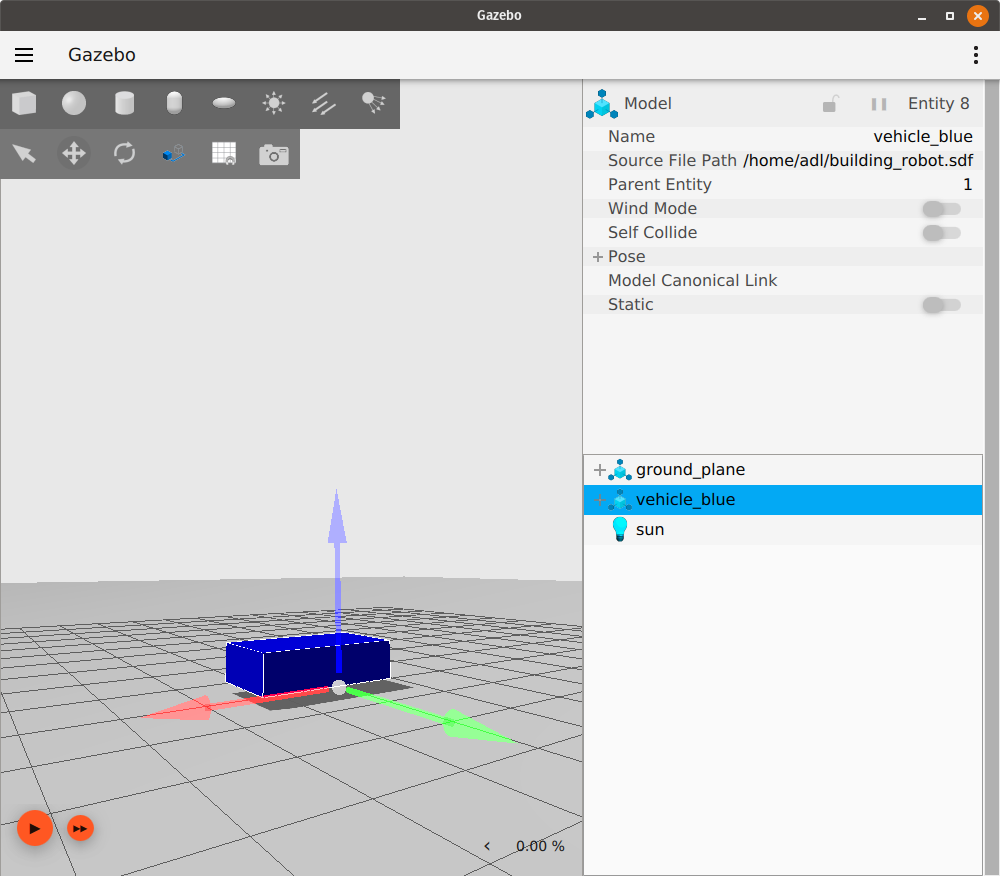
These are the axes of our model where red is the x-axis, green is the y-axis and blue is the z-axis.
Left wheel

Let's add wheels to our robot. The following code goes after the?</link>?tag and before the?</model>?tag. All the links and joints belonging to the same model should be defined before the?</model>.
<link name='left_wheel'>
<pose relative_to="chassis">-0.5 0.6 0 -1.5707 0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>We defined the name of our link?left_wheel?and then defined its?<pose>?relative_to?the?chassis?link. The wheel needed to be placed on the left to the back of the?chassis?so that's why we chose the values for?pose?as?-0.5 0.6 0. Also, our wheel is a cylinder, but on its side. That's why we defined the orientation value as?-1.5707 0 0?which is a?-90?degree rotation around the x-axis (the angles are in radians). Then we defined the?inertial?properties of the wheel, the?mass?and the?inertia?matrix.
Visualization and Collision
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>The?<visual>?and the?<collision>?properties are similar to the previous link, except the shape of our link has the shape of?<cylinder>?that requires two attributes: the?<radius>?and the?<length>?of the cylinder. Save the file and run the world again, our model should look like this:

Right wheel
<!--The same as left wheel but with different position-->
<link name='right_wheel'>
<pose relative_to="chassis">-0.5 -0.6 0 -1.5707 0 0</pose> <!--angles are in radian-->
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>The right wheel is similar to the left wheel except for its position.
Defining an arbitrary frame

As of SDF 1.7 (Fortress uses SDF 1.8), we can define arbitrary frames. It takes two attributes:
name: the name of the frameattached_to: the name of the frame or the link to which this frame is attached.
Let's add a frame for our caster wheel as follows:
<frame name="caster_frame" attached_to='chassis'>
<pose>0.8 0 -0.2 0 0 0</pose>
</frame>We gave our frame name?caster_frame?and attached it to the?chassis?link, then the?<pose>?tag to define the position and orientation of the frame. We didn't use the?relative_to?attribute so the pose is with respect to the frame named in the?attached_to?attribute,?chassis?in our case.
Caster wheel

<!--caster wheel-->
<link name='caster'>
<pose relative_to='caster_frame'/>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.016</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.016</iyy>
<iyz>0</iyz>
<izz>0.016</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>Our last link is the?caster?and its pose is with respect to the frame?caster_frame?we defined above. As you could notice we closed the?pose?tag without defining the position or the orientation; in this case the pose of the link is the same as (identity) the frame in?relative_to.
In the?<visual>?and?<collision>?tags we defined a different shape?<sphere>?which requires the?<radius>?of the sphere.
Connecting links together (joints)

We need to connect these links together; here comes the job of the?<joint>?tag. The joint tag connects two links together and defines how they will move with respect to each other. Inside the?<joint>?tag we need to define the two links to connect and their relations (way of movement).
Left wheel joint

<joint name='left_wheel_joint' type='revolute'>
<pose relative_to='left_wheel'/>Our first joint is the?left_wheel_joint. It takes two attributes: the name?name='left_wheel_joint'?and the type?type='revolute'. the?revolute?type gives 1 rotational degree of freedom with joint limits. The pose of the joint is the same as the child link frame, which is the?left_wheel?frame.
<parent>chassis</parent>
<child>left_wheel</child>Every joint connects two links (bodies) together. Here we connect the?chassis?with the?left_wheel.?chassis?is the parent link and?left_wheel?is the child link.
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz> <!--can be defined as any frame or even arbitrary frames-->
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>Here we define the axis of rotation. The axis of rotation can be any frame, not just the?parent?or the?child?link. We chose the y-axis with respect to the?model?frame so we put?1?in the y element and zeros in the others. For the revolute joint we need to define the?<limits>?of our rotation angle in the?<lower>?and?<upper>?tags.
Note: The angles are in radians.
Right wheel joint
The?right_wheel_joint?is very similar except for the pose of the joint. This joint connects the?right_wheel?with the?chassis.
<joint name='right_wheel_joint' type='revolute'>
<pose relative_to='right_wheel'/>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negative infinity-->
<upper>1.79769e+308</upper> <!--positive infinity-->
</limit>
</axis>
</joint>Caster wheel joint
For the caster we need a different type of joint (connection). We used?type='ball'?which gives 3 rotational degrees of freedom.
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>Conclusion

Run the world:
gz sim building_robot.sdf
It should look like this:
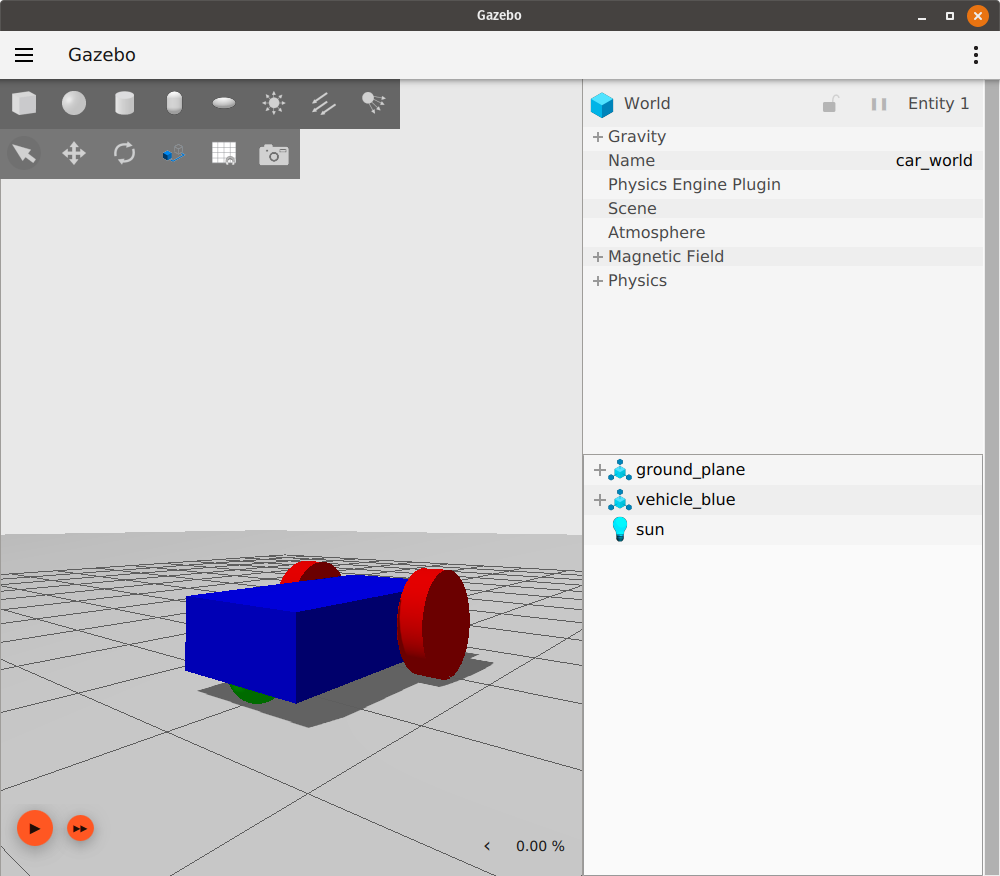
Hurray! We build our first robot. You can learn more details about SDFormat tags?here. In the next?tutorial?we will learn how to move our robot around.
Video walk-through

A video walk-through of this tutorial is available from our YouTube channel:?Gazebo tutorials: Building a robot.
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!