轻松入门C语言实现有限状态机FSM
文章目录
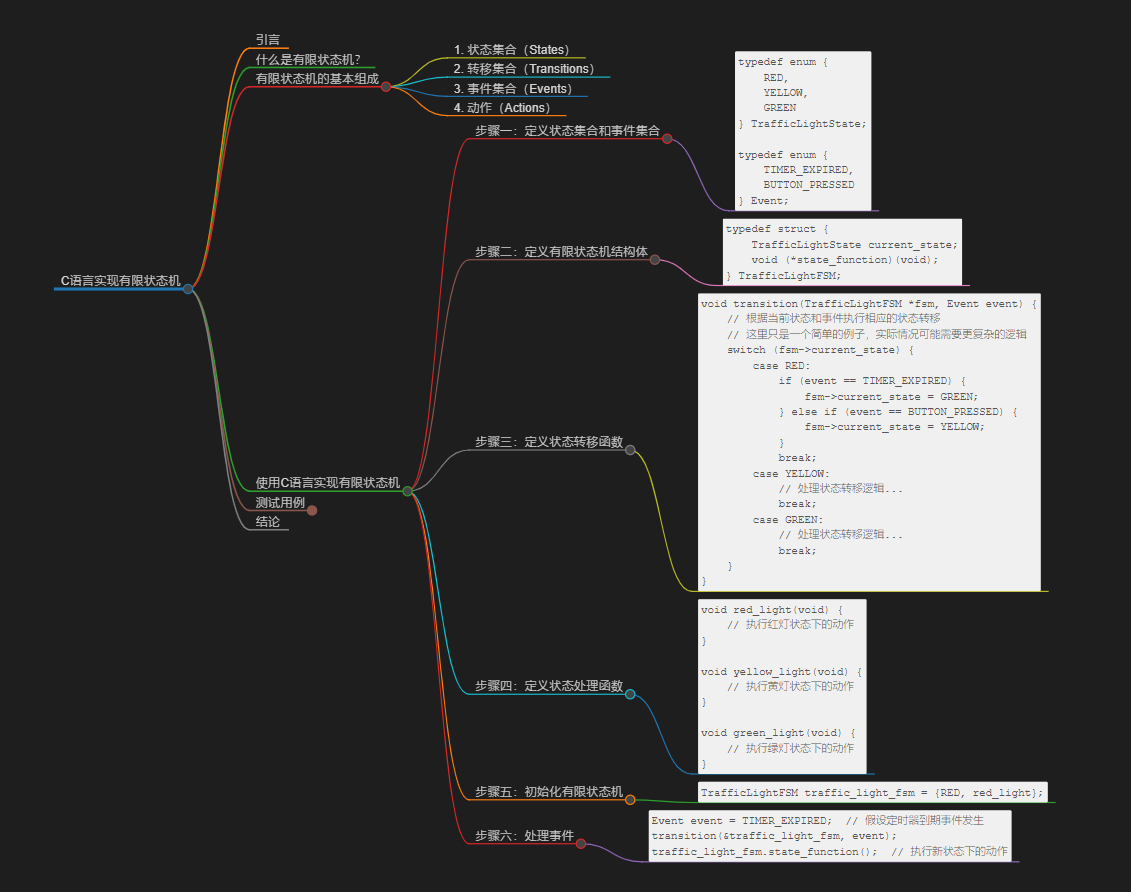
引言
在嵌入式系统开发中,有限状态机(Finite State Machine,简称FSM)是一种强大的工具,用于描述系统在不同状态之间转换的行为。通过合理地利用有限状态机,我们可以更加高效地设计和实现嵌入式系统。本文将介绍什么是有限状态机,以及如何使用C语言来实现一个简单而强大的有限状态机。
什么是有限状态机?
有限状态机是一种数学模型,用于描述系统在不同状态之间转换的行为。它可以看作是一个状态集合、转移集合和事件集合的组合。系统通过响应事件来改变当前状态,并根据当前状态来确定下一个可能的状态。
在嵌入式系统中,有限状态机通常用于建模控制系统、通信协议、用户界面等方面。通过将系统的不同操作和行为抽象为状态,我们可以更好地组织和理解系统的逻辑。
有限状态机的基本组成
一个有限状态机由以下几个基本组成部分构成:
1. 状态集合(States)
状态集合是系统可能处于的所有状态的集合。每个状态代表系统的一个特定状态,比如等待、工作、休眠等。
2. 转移集合(Transitions)
转移集合定义了状态之间的转移关系。当系统接收到特定事件时,它会从当前状态转移到下一个状态。转移可以是简单的直接跳转,也可以包含条件判断。
3. 事件集合(Events)
事件集合包含可能触发状态转移的所有事件。这些事件可以是外部输入、定时器到期、传感器触发等。
4. 动作(Actions)
在状态转移的同时,系统可能需要执行一些特定的动作。这些动作可以是更新变量、发送消息、启动任务等。
使用C语言实现有限状态机
现在,让我们看看如何使用C语言来实现一个简单的有限状态机。我们将以一个简单的交通灯控制系统为例,演示有限状态机的实现过程。
步骤一:定义状态集合和事件集合
typedef enum {
RED,
YELLOW,
GREEN
} TrafficLightState;
typedef enum {
TIMER_EXPIRED,
BUTTON_PRESSED
} Event;
在这个例子中,我们定义了三种交通灯状态(红灯、黄灯、绿灯)和两种事件(定时器到期、按钮按下)。
步骤二:定义有限状态机结构体
typedef struct {
TrafficLightState current_state;
void (*state_function)(void);
} TrafficLightFSM;
这个结构体包含了当前状态和状态对应的处理函数。
步骤三:定义状态转移函数
void transition(TrafficLightFSM *fsm, Event event) {
// 根据当前状态和事件执行相应的状态转移
// 这里只是一个简单的例子,实际情况可能需要更复杂的逻辑
switch (fsm->current_state) {
case RED:
if (event == TIMER_EXPIRED) {
fsm->current_state = GREEN;
} else if (event == BUTTON_PRESSED) {
fsm->current_state = YELLOW;
}
break;
case YELLOW:
// 处理状态转移逻辑...
break;
case GREEN:
// 处理状态转移逻辑...
break;
}
}
步骤四:定义状态处理函数
void red_light(void) {
// 执行红灯状态下的动作
}
void yellow_light(void) {
// 执行黄灯状态下的动作
}
void green_light(void) {
// 执行绿灯状态下的动作
}
步骤五:初始化有限状态机
TrafficLightFSM traffic_light_fsm = {RED, red_light};
步骤六:处理事件
Event event = TIMER_EXPIRED; // 假设定时器到期事件发生
transition(&traffic_light_fsm, event);
traffic_light_fsm.state_function(); // 执行新状态下的动作
通过以上步骤,我们成功地用C语言实现了一个简单的交通灯控制系统的有限状态机。
测试用例
为了确保有限状态机的正确性,我们需要添加一些测试用例。测试用例可以覆盖各种情况,确保系统在不同状态和事件组合下表现正常。以下是一些简单的测试用例,演示了交通灯控制系统的一些典型行为:
#include <stdio.h>
int main() {
// 初始化有限状态机
TrafficLightFSM traffic_light_fsm = {RED, red_light};
// 测试用例 1: 定时器到期,从红灯转到绿灯
Event event1 = TIMER_EXPIRED;
printf("Test Case 1:\n");
printf("Current State: RED\n");
transition(&traffic_light_fsm, event1);
printf("New State: ");
traffic_light_fsm.state_function();
printf("\n\n");
// 测试用例 2: 按钮按下,从红灯转到黄灯
Event event2 = BUTTON_PRESSED;
printf("Test Case 2:\n");
printf("Current State: RED\n");
transition(&traffic_light_fsm, event2);
printf("New State: ");
traffic_light_fsm.state_function();
printf("\n\n");
// 测试用例 3: 按钮按下,从绿灯转到黄灯
printf("Test Case 3:\n");
traffic_light_fsm.current_state = GREEN; // 设置当前状态为绿灯
printf("Current State: GREEN\n");
transition(&traffic_light_fsm, event2);
printf("New State: ");
traffic_light_fsm.state_function();
printf("\n\n");
// 其他测试用例...
return 0;
}
通过运行这些测试用例,我们可以验证有限状态机在不同情况下的表现是否符合预期。测试用例的设计应该考虑到各种可能的状态和事件组合,以确保系统的稳健性和正确性。
结论
有限状态机是嵌入式系统设计中的一项重要工具,它能够帮助我们更好地组织和理解系统的逻辑。通过使用C语言,我们可以轻松实现有限状态机,从而提高嵌入式系统的可维护性和可扩展性。
希望通过本文的介绍,能够更加深入地理解有限状态机的概念和实现方法。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!