【无标题】
2024-01-10 16:18:07
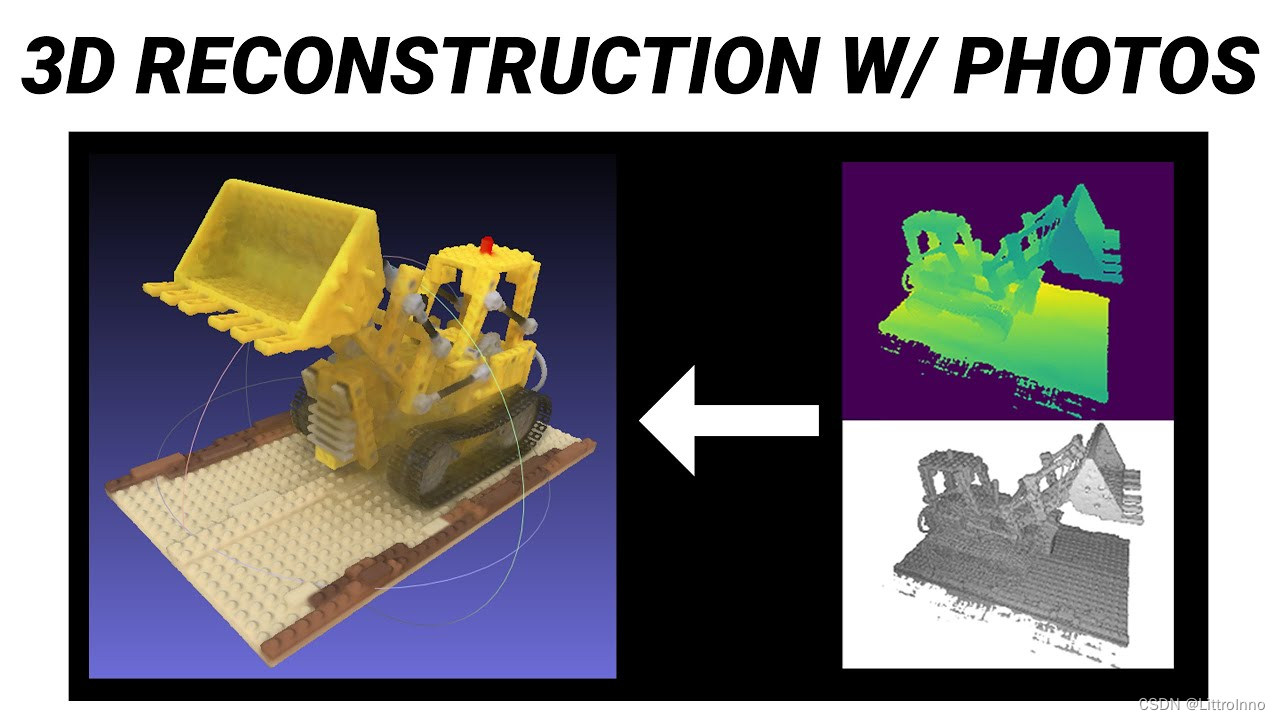
神经辐射场(NeRF)是一种用于三维场景重建的深度学习算法。它能够从一组稀疏的二维图片中重建出高质量的三维场景。
以下是对NeRF算法的原理和实现方法的详细解释:
NeRF算法原理:
-
基本概念: NeRF算法基于光线追踪的原理,使用神经网络来学习场景中每个位置的颜色和密度。通过对多个视角的二维图像进行分析,NeRF能够推断出场景中每个点的颜色和体积密度。
-
输入数据: 输入到NeRF算法中的数据是从不同视角拍摄的一系列图片。这些图片应该包含有关场景的丰富信息,以便算法能够准确重建三维场景。
-
神经网络结构: NeRF使用一个全连接的神经网络(通常为多层感知器MLP)来表示场景。网络输入一个五维向量,包括空间位置(XYZ)和观察方向(θ, φ),输出该点的RGB颜色和体积密度。
-
光线追踪: 对于每个像素,算法沿着从相机位置到该像素的光线发射多个采样点,通过神经网络预测这些点的颜色和密度。
-
体积渲染: 使用体积渲染技术将这些采样点合成为最终的颜色。这个过程涉及到计算光线经过的所有采样点的贡献,以及如何将这些贡献累加到最终的像素颜色中。
NeRF算法的具体实现:
-
数据预处理:
- 首先,需要从多个角度拍摄场景的照片。这些图片应该覆盖场景的不同部分,以确保重建的完整性。
- 使用相机标定技术获取每张图片的相机参数(位置、方向、焦距等)。
-
网络设计:
- 构建一个全连接的神经网络。这个网络需要足够深以学习复杂的场景表示,但也不能太深以致于训练成本过高。
- 网络通常包含几个隐藏层,每层有数百个神经元。
-
训练过程:
- 在训练阶段,神经网络将会接收到大量从不同视角和位置的光线所对应的五维坐标(空间位置和视角)。
- 网络的目标是最小化预测颜色与实际像素颜色之间的差异。
-
优化:
- 使用诸如Adam这样的优化算法来调整网络参数,以改进预测结果。
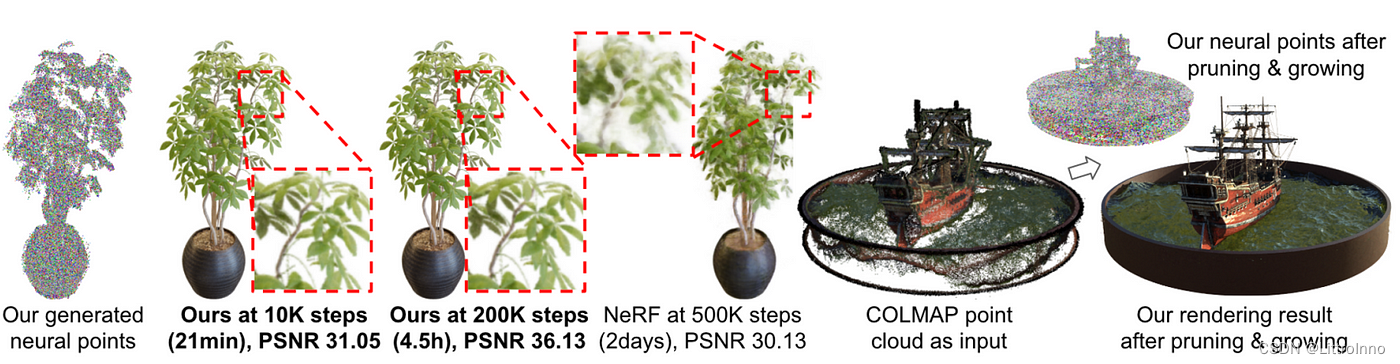
- 训练过程可能需要大量的时间和计算资源,因为网络需要处理大量的输入数据。
-
渲染与重建:
- 在训练完成后,NeRF可以用来渲染新的视角,或者重建整个场景的三维表示。
- 渲染新视角时,算法会模拟从该视角发出的光线,并使用训练好的模型来估计光线路径上各点的颜色和密度。
应用领域:
NeRF在多个领域都有广泛的应用,包括:
- 虚拟现实(VR)与增强现实(AR):为VR/AR环境创建逼真的三维场景。
- 电影和游戏行业:用于高质量的场景渲染。
- 建筑和工程:创建建筑物和其他大型结构的三维模型。
- 遗产保护:重建和保存历史遗迹的三维模型。
结论:
NeRF是一个强大的三维重建工具,能够从有限的二维数据中创建出惊人的三维场景。尽管它在计算上要求高,并且训练过程可能相当耗时,但它在视觉真实性和细节方面提供了巨大的优势。随着硬件和算法的进步,预计NeRF及其变体将在未来的图像处理和三维重建领域扮演更加重要的角色。
文章来源:https://blog.csdn.net/kwdx2/article/details/135505343
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!