机器人制作开源方案 | 全自动家用核酸检测机器人
?作者:朱星宇 吴奇洪 张雨洲
单位:河海大学
指导老师:施敏虎 庄曙东
? ? ? 全自动家用核酸检测机器人可用于解决大规模核酸采样时医护人员不足,核酸检测排队时间过长、医护人员与受检者交叉感染风险等问题。该机器人通过摇杆滑块伸缩臂、直动滑杆双指镊爪、X型电动升降台等机械结构和利用摄像头检测与程序判断具体情况,语音提醒受检人,规范化采样流程,实现在家中完成核酸采样。通过隔离板,隔离机器人和受检者,避免感染,并配备蓝牙遥控、语音等多种控制方式使操作更便捷。
关键词:全自动;家用;核酸检测;降低感染风险;智能高效
1. 绪论
1.1 背景
? ? ? 随着疫情的此起彼伏,核酸检测逐渐开始常态化,高强度和高集中度的核酸采集对于医疗人力资源是一种巨大的挑战,而新闻上核酸采集医护人员因高强度工作而脱力晕倒的现象时有报道。目前,口咽拭子采样是核酸检测的主要方式,也是疫情防控至关重要的一环。因为集体排队进行口咽拭子采样存在核酸采样医护人员不足,核酸检测排队时间过长、有医护人员与受检者交叉感染风险等问题,所设计该机器人以方便远程控制家用自检或社区受检。
口咽拭子核酸检测采样标准方法:
? ? ? ① 请患者坐下,头后仰,长大嘴,并发出“啊”的声音;
? ? ? ② 采样者用一次性采样拭子(最好是植绒拭子),越过舌根到咽后壁及扁桃体隐窝、侧壁等处;
? ? ? ③ 用拭子反复擦拭咽后壁处3-5次,收集粘膜细胞(拭子吸收到的痰液标本);

? ? ? ④ 轻轻将拭子从患者口中拿出,不要碰到舌头、悬垂体、口腔粘膜和唾液,以免污染;
? ? ? ⑤ 拭子轻轻地垂直地放进病毒采样管中,禁止碰到管壁以免污染;
? ? ? ⑥ 在管壁口轻轻将拭子在折断点处折断,并把拭子折断出来的尾部丢掉;
? ? ? ⑦ 盖好病毒采样管的盖子并核对好患者的资料,以免混淆;
? ? ? ⑧ 将采集好的病毒采样管垂直放入运送箱,以防泄漏;
? ? ? ⑨ 及时或尽快送往实验室进行检验。
? ? ? 通过对该传统进程的研究,我们希望深入理解此过程并设计出符合操作要求的机械结构和程序,进而还原核酸样本采集过程。
1.2 现状
? ? ? 经过调查,目前市场使用的装置主要有:
? ? ? ①“鹏程青耕”鼻咽拭子采样机器人
? ? ? 全自动鼻咽拭子采样机器人“鹏程青耕”,如下图所示,该机器人能用机械臂采集鼻咽拭子。要做核酸检测的人坐到它面前,它会用三维的激光雷达,扫描场景、识别人体,再利用人工智能的算法,定位人脸上的五官。目标锁定后,机械臂就会掏出棉签,轻柔地伸进被采集对象的鼻孔。采集到鼻咽拭子后,再放入样本器皿里保存。当完成一个人的采样,机器人还会“跑”到消毒区域,主动给机械臂消毒,然后才继续下一个采样。
? ? ? 优点:智能化程度高
? ? ? 缺点:目前大部分大规模排查核酸检测方式为口咽拭子。同时与其相比本项目机器人体积较小,成本更低。 ?
② 全自动核酸采样亭
? ? ? 全自动核酸采样亭,如下图所示,全自动核酸采样亭长2.2米、宽1.3米、高2.1米,坐落于上海大学宝山校区的报告厅大厅。采样的学生需在手部测温,自行扫描核酸码后,来到采样窗口前,按照语音提醒,使其面部靠近采样窗口,对准窗口张开嘴巴,等待机械臂抓起拭子,进行采样。完成整个采样过程,最快仅需耗时22秒。该采样机器人具有“全自动、非接触、大通量、云监控”等特色。

? ? ? 优点:自动化程度高,效率高
? ? ? 缺点:相对于本项目,该核酸采样亭成本过高且移动不够便捷
2. 作品介绍
2.1设计思路
? ? ? 通过分析,本装置应该具有以下特点:
? ? ? ① 可通过摇杆滑块伸缩臂、直动滑杆双指镊爪、电动升降台,利用、蓝牙遥控和语音模块引导受检人进行规范的口咽拭子采样,利于家用,对特殊群体同样友善。
? ? ? ② 摄像头可扫描核酸采样码,在家中远程登记信息,传输到数据点,智能便捷,事故发生概率较小。
? ? ? ③ 通过分析摄像头传来的信息,舵机运作使拭子夹上下平移,根据受检人口腔的位置调整至适合的高度,再通过舵机运作使咽拭子成功从咽部和扁桃体取分泌物。自动化,智能化无人化程度高。
2.2 装置简述
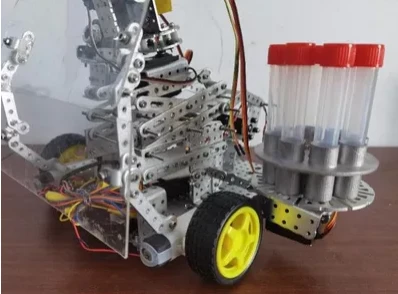
? ? ? 自动家用核酸检测机器人分为五个部分:摇杆滑块伸缩臂部分、直动滑杆双指镊爪部分、X型电动升降台部分、试管架部分、摄像头及语音部分。装置整体结构如下图所示:
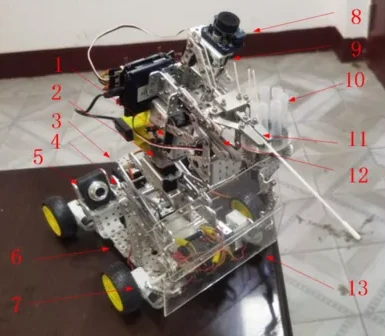
? ? ? 图中:1.纵向旋转架 2.横向旋转台 3.升降控制舵机 4.X型电动升降台 5.摄像头 6.车身 7.车轮驱动舵机 8.语音模块 9.机械爪开合控制舵机 10.试管旋转台 11.双指镊爪 12.伸缩导轨 13.隔离板。
? ? ? ① 直动滑杆双指镊爪:采用直动滑杆机构,通过伺服舵机实现拭子夹的开合,从而实现拭子的夹取。如下图所示(图中:6-1舵盘 、6-2直杆、6-3 弯杆、7-1传动轴、7-2轴座、7-3 第一夹取臂 、7-4第二夹取臂。)

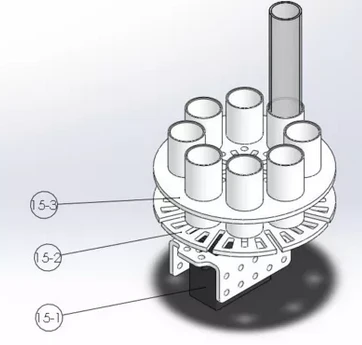
? ? ② 试管架部分:采用伺服舵机控制试管架转动,实现拭子的收集。如下图所示(图中:15-1伺服舵机、15-2转动盘、15-3试管架。)
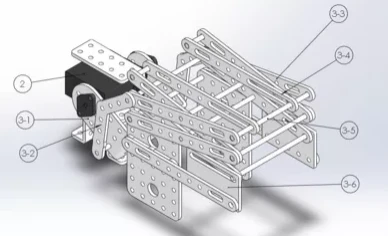
? ? ? ③ X型电动升降台部分:采用基于平行四边形原理铰接的X形剪式收缩装置,通过伺服电机控制来完成对不同高度的人的核酸采样。如下图所示(图中:2伺服电机、3-1舵盘、3-2 L形曲杆、3-3 X形铰接杆、3-4滑轨、3-5连杆。)
3. 装置原理介绍
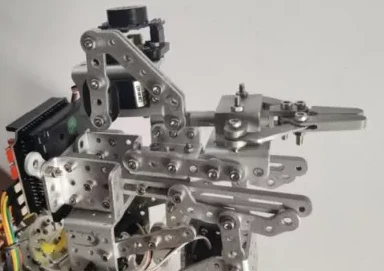
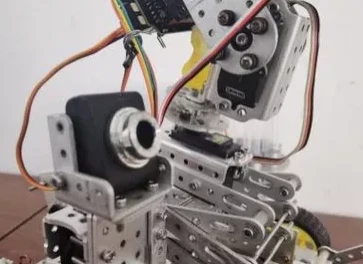
3.1 摇杆滑块伸缩臂
? ? ? 摇杆滑块伸缩臂如下图所示,通过程序智能控制双头舵机,实现机械臂纵向摆动。接着,利用曲柄滑块机构实现伸缩的功能,最后末端利用舵机驱动曲柄转动一定角度,带动直动滑杆进退,从而控制后端杆件小角度转动,从而控制双指镊爪开合。
3.1.1 对摇杆滑块伸缩臂进行设计分析 ? ?
通过查阅人体工程学数据,计算得出成年人嘴唇至口腔上壁的距离为70mm~80mm,故设计伸缩行程应至少80mm,伸缩部分采用曲柄滑块机构,取行程为90mm。
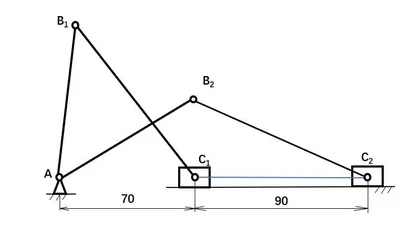
? ? ? 一般工程许用压力角为55°,此处为获得较好的传力性能,则传动角应大于35°,应使最小压力角(0°)位置位于行程内,由是获得两极限位置下较好的压力角。最小压力角位置所处行程越远,安装距离越小,但极限位置处压力角会越大,故综合空间利用和力学要素,经过圆整后,取最小压力角位置约为行程55mm处,取安装位置70mm,曲柄长80mm,摇杆长100mm,此时最大压力角为45.95°<[α]=55°,作出机构运动简图如下图所示:
核验最大压力角:于两极限位置处取得最大压力角。
对极限位置1:
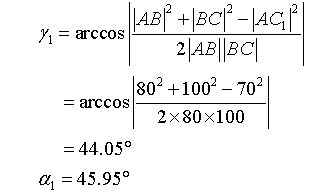
对极限位置2:
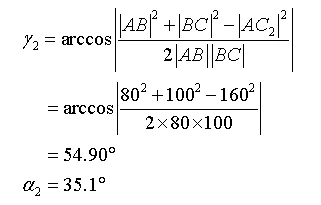
故最大压力角:
![]()
满足设计要求。
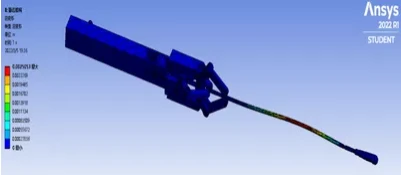
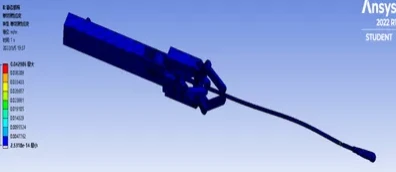
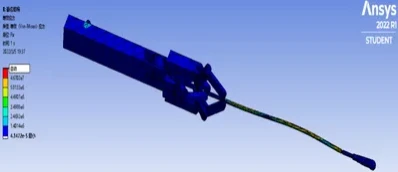
3.1.2 对伸缩臂部分进行最大变形量和最大应力的分析
使用ANSYS仿真模拟软件,在机械臂存放拭子样本情况下进行分析,对伸缩臂部分进行最大变形量和最大应力的分析,并做出以下假设:
? ? ? ① 伸缩臂主臂部分材料为铝合金,其密度为2.75g/cm3,弹性模量为70Gpa,泊松比为0.33,上装有两个0.5kg的舵机,总自重近似为2.5kg。
? ? ? ② 拭子部分材料为医用级ABS,其密度近似取1.1g/cm3,弹性模量为2.2Gpa,切变模量为0.3189GPa,泊松比为0.394,自重为2g。
? ? ? ③ 拭子折断的临界力为2N。
? ? ? 考虑拭子在折断动作下的受力情况,得出以下分析结果:
? ? ? 由变形云图、应变云图和应力云图可知,最大变形量为2.51mm,最大应变为0.043,最大应力4.67MPa。故机械臂主臂部分安全,拭子能顺利折断。该情况为给予一定安全因素下的分析,实际情况较该数值保守,满足要求。
3.2 X型电动升降台
? ? ? X型电动升降台如下图所示,采用基于平行四边形原理铰接的X型剪式伸缩机构,两对X型铰链杆为一组,共两组,每组X型铰链杆都通过中心杆连接、固定。从舵机输入动力,通过曲柄滑块机构进行第一级传动,将动力传递给两组铰链杆的连接杆,从而带动升降。第一组的铰链杆分别嵌套在相对的两组滑轨和固定端中,可实现灵活升降。
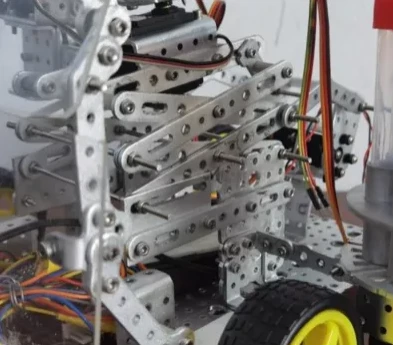
优点:① 采用平行四边形原理铰接,并配备合适的铰链杆,可以很好地承受机械臂的负荷。
? ? ? ? ?② 该机构可以实现稳定的直线移动。
3.2.1对X型电动升降台进行设计分析 ?
? ? ? 通过查阅人体工程学数据,设立高度包容域半径为35mm,因此设计需满足至少70mm的高度抬升,采用X型升降台,可等效为一个曲柄滑块机构,控制移动副位于两级铰链杆的连接杆处,具有增程效果,增程倍数为2。故实际移动副仅需要完成35mm的抬升行程即可。实际由于原动件转轴与移动轨迹线的安装距离水平距离为50mm,垂直距离为34.26mm。给定曲柄初始角度为45°,摆角为60°。机构运动简图如下图所示:
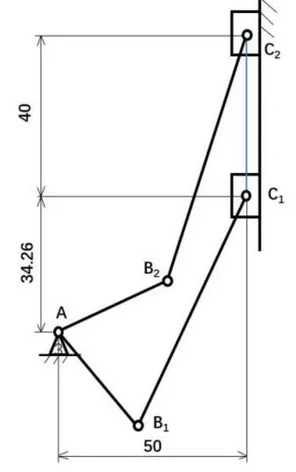
杆件参数设计过程如下

核验最大压力角:
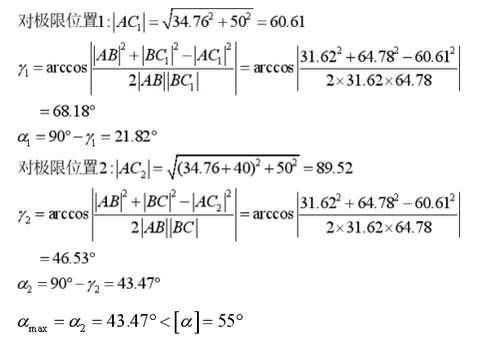
满足设计要求。
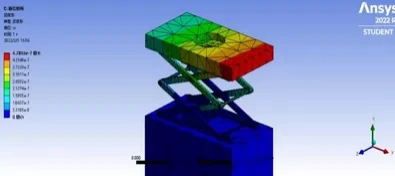
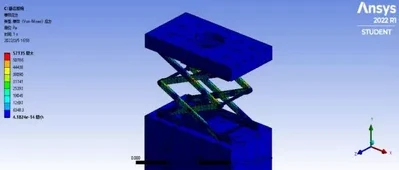
3.2.2对升降台部分进行最大变形量和最大应力的分析
? ? ? 使用ANSYS仿真模拟软件,在机械臂存放拭子样本两种情况下进行分析,对伸缩臂部分进行最大变形量和最大应力的分析,并做出以下假设:
? ? ? ① 升降台部分材料为铝合金,其密度为2.75g/cm3,弹性模量为70Gpa,泊松比为0.33,自重为0.144kg。
? ? ? ② 升降台上载物的总重量为5kg,重心可近似取距离矩形平台边缘10%长度的位置。
? ? ? 考虑升降台在常规承重下的受力情况,得出以下分析结果:
? ? ? 由变形云图和应力云图可知,最大变形量为4.79mm,最大应力57.14MPa。故机械臂主臂部分安全,拭子能顺利折断。该情况为给予一定安全因素下的分析,实际情况较该数值保守,满足要求。
3.3 拭子存放部分和隔离板
如下图所示,采用圆环均匀分布型试管台,可以容纳八根试管,试管台底下安装有一个小型舵机,用于完成试管台的定角度转动。当完成采集后,试管台底下的舵机转动一定角度,便能流畅自然地完成试管的更换。
优点:由程序进行控制,可以灵活更换试管,隔离板辅助隔离,避免交叉感染。
4. 智能控制系统
????? 本装置的传感器采用摄像头,语言模块,蓝牙遥控等模块控制,通过处理器对信号处理,灵活应变采样需求,功能性更强大,更贴近现代化生活,让核酸检测变得更智能。
4.1 摄像头
? ? ? 通过摄像头可以远程扫描核酸检测必要的核酸码,同时可以便于医护人员远程实时监控检测环境和突发情况,以便及时应对。
? ? ? 当受检者进入采样区域后,语音模块提醒受检者在摄像头前出示核酸采样码。当工作人员扫描采样码后,核酸采样自动开始。
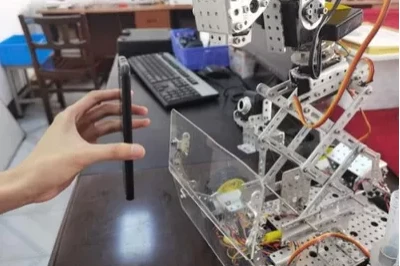
出示采样码
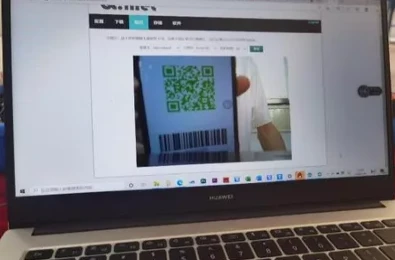
远程扫描采样码
4.2 语言模块
? ? ? 语音识别芯片采用的是ASR技术。基于语音识别系统可以随着使用流程,在运行时动态地更改关键词语列表的内容,这样可以用一个系统支持多种不同的场景,同时也不需要用户作任何的录音训练。通过语音提醒受检者完成核酸检测流程,方便快捷。

4.3 蓝牙遥控
? ? ? 蓝牙模块如下图所示,HC-05蓝牙串口通讯模块具有两种工作模式:命令响应工作模式和自动连接工作模式。主要采用命令响应工作模式,通过内置的2.4GHz天线,与用户设备连接。用户可以向模块发射各种AT命令,为模块设定控制参数或发布控制命令。通过蓝牙模块可实时控制伺服电机和舵机,根据情况使机器人按要求移动和采样,更加智能便携。
5. 设计意义
5.1 装置创新点
? ? ? 本装置契合当今疫情背景下核酸检测常态化的发展趋势,利用探索者成熟的机械结构件与控制模块,便于实现大批量生产制造。相较于传统的核酸检测,提高了智能化和无人化程度,解决了核酸采样医护人员不足,核酸检测排队时间过长、有医护人员与受检者交叉感染风险等问题,从而更好地响应了疫情阻击的要求。
? ? ? ① 在结构上:通过摇杆滑块伸缩臂、直动滑杆双指镊爪、X型电动升降台等机械结构来实现采样的自动化。通过X型的升降台可以实现平稳抬升。
? ? ? ② 在功能上:能无人化地将拭子样本存放于保存液试管并避免污染,通过圆周舵机,通过伺服舵机实现拭子夹的开合,从而实现拭子的夹取。采用伺服舵机控制试管架转动,实现拭子的收集。采用基于平行四边形原理铰接的X形剪式收缩装置,通过伺服电机控制来完成对不同高度的人的核酸采样,具有灵活性。
? ? ? ③ 在智能上:通过蓝牙遥控和语音提醒以及摄像头的识别可以实现智能化采样。语言模块内部提前植入了“开始检测”“检测结束”等提示语音,更有利于对受检者的提醒和拭子的采集 。摄像头执行人脸识别处理程序的命令,可以实现对不同个体情况的灵活适应。
5.2 技术路线
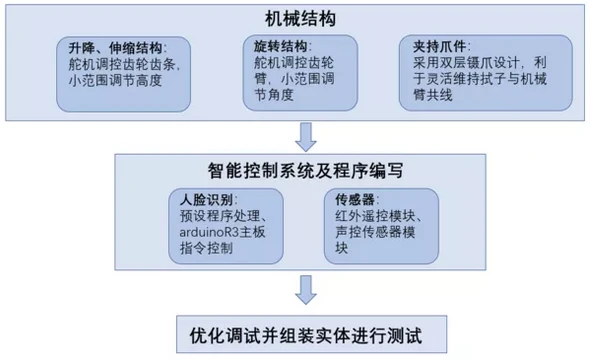
?? ? ? 该装置以核酸检测机器人的结构设计、有限元分析、动力学仿真、驱动控制、防水密封、传感器技术为主要研究对象,采用理论分析、建模分析、评价分析和试验验证等方法,研究核酸检测机器人的设计和优化问题。具体为:
? ? ? ① 搜集相关论文、专利等资料,深入研究国内外研究现状、动态信息和发展趋势;
? ? ? ② 深入研究核酸检测机器人的设计原理和方法,对机器人的结构和功能提出要求,基于此来对已有的设计方案进行深入的分析及优化,并建立初步模型;
? ? ? ③ 通过仿真软件对模型进行有限元分析及动力学仿真,合理优化结构设计及运动轨迹;
? ? ? ④ 深入分析和建立整体的控制系统,优化人机交互系统;
? ? ? ⑤ 对设计方案多次优化后,建立实物样机对理论分析进行检验
5.3 应用前景
? ? ? ① 可用于大规模核酸采样,操作简便,适用性强。
? ? ? ② 核酸采样医护人员不足,核酸检测排队时间过长。
? ? ? ③ 避免医护人员与受检者交叉感染风险等问题,竞争力强,市场应用前景广阔。
6. 结语
6.1 设计心得
? ? ? 在这次比赛我们收获了很多,短短数月的时间我们经历了各种知识的学习,和机械以及编程知识的补充学习,比赛不仅需要的是对机械结构的构思,还涉及到工程图的绘制,solidworks建模,其中最最困难的是通过有限元分析软件ANSYS绘制出了伸缩臂在不同开度下应力和变形的云图,计算出它的最大承重,经过多方面的学习和实际参数的考证与估计,最终还是做出来了,无论最后的结果如何,这段宝贵的经历对我来说都是难能可贵的财富。除此之外,整个团队的互相鼓励,探讨方案与改进策略,也深深让我们认识到团队的重要性,只要有不服输的精神和认真的态度,自己就不会后悔。最后再次感谢所有参与设计的老师们与同学们。
6.2 结语
本项目设计了一种全自动家用核酸检测机器人,无人化程度高,解决了核酸采样医护人员不足,核酸检测排队时间过长、有医护人员与受检者交叉感染风险等问题,并具有蓝牙遥控和语音引导功能,可规范核酸流程,便于操作。
更多详情请见:【S051】全自动家用核酸检测机器人
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!