colmap三维重建核心逻辑梳理
2023-12-18 13:08:36
1. 算法流程束流
重建核心逻辑见 incremental_mapper.cc 中 IncrementMapperController 中 Reconstruct
- 初始化变量和对象
- 判断是否有初始重建模型,若有,则获取初始重建模型数量,判断是否超过1个
- 进入初始重建循环,根据初始重建次数进行循环
- 判断是否暂停或停止,若停止则退出
- 添加或获取重建对象
- 执行重建初始化
- 寻找初始影像对,若未指定则尝试寻找
- 注册初始影像对,并进行全局束调整和点云筛选
- 提取影像颜色
- 回调初始化影像对注册完成
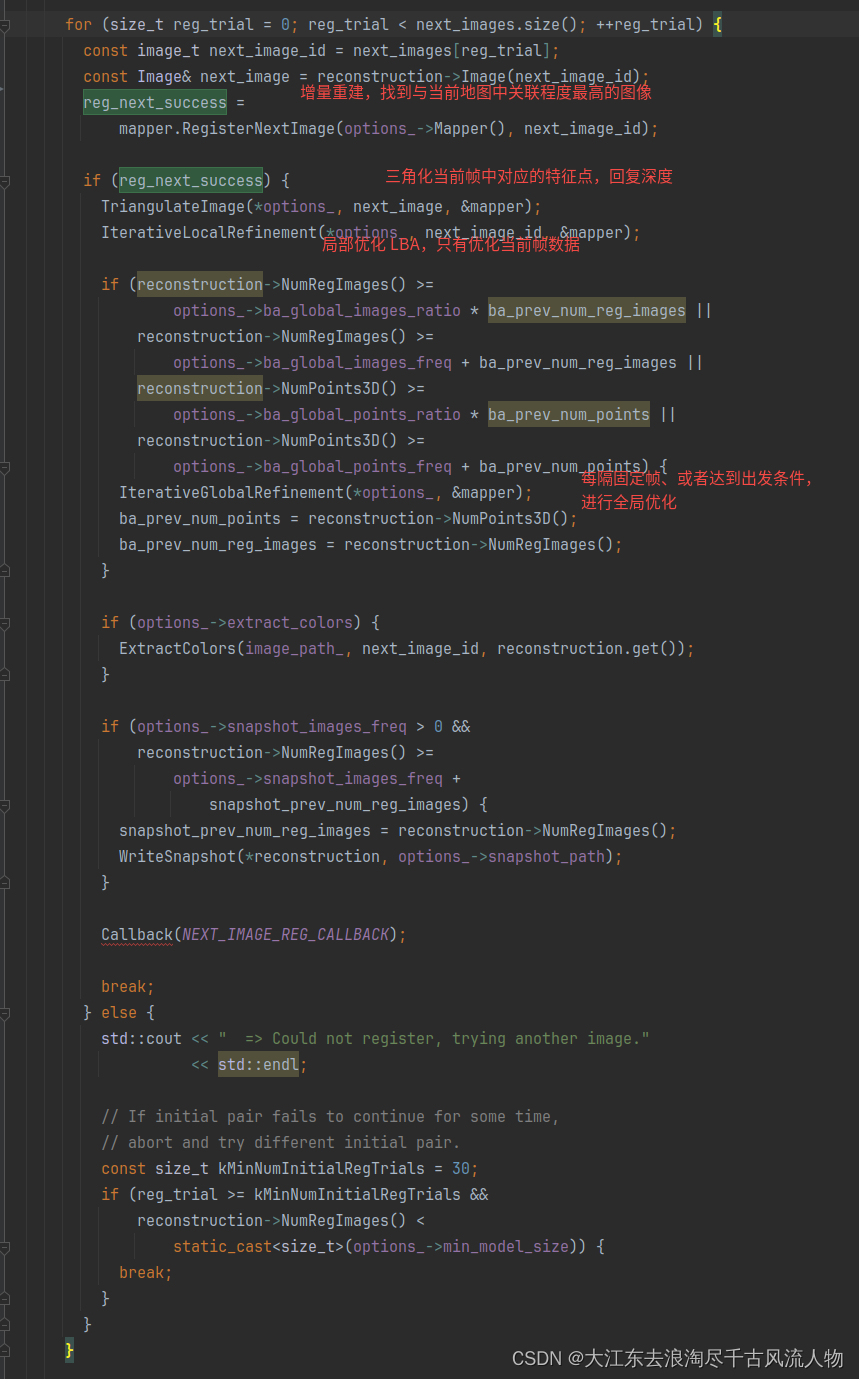
- 进行增量重建
- 注册下一个影像,并进行局部和全局细化
- 提取影像颜色,根据条件写入快照,回调影像注册完成
- 若停止,则结束重建并退出
- 在一定条件下进行最终的全局细化
- 根据重建模型数量和总注册影像数量决定是否结束循环
2. 初始化

3. 重建主流程
文章来源:https://blog.csdn.net/Darlingqiang/article/details/135057595
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!