ros2基础学习13 DDS 通信得学习
ROS2中最为重大的变化——DDS,我们在前边课程中学习的话题、服务、动作,他们底层通信的具体实现过程,都是靠DDS来完成的,它相当于是ROS机器人系统中的神经网络。
通信模型
DDS的核心是通信,能够实现通信的模型和软件框架非常多,这里我们列出常用的四种模型。
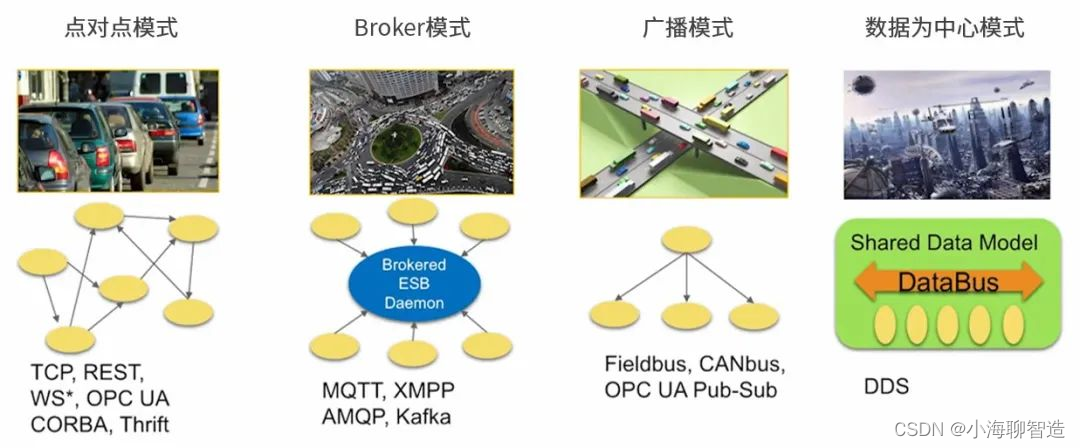
- 第一种,点对点模型,许多客户端连接到一个服务端,每次通信时,通信双方必须建立一条连接。当通信节点增多时,连接数也会增多。
而且每个客户端都需要知道服务器的具体地址和所提供的服务,一旦服务器地址发生变化,所有客户端都会受到影响。
- 第二种,Broker模型,针对点对点模型进行了优化,由Broker集中处理所有人的请求,并进一步找到真正能响应该服务的角色。
这样客户端就不用关心服务器的具体地址了。不过问题也很明显,Broker作为核心,它的处理速度会影响所有节点的效率,当系统规模增长到一定程度,Broker就会成为整个系统的性能瓶颈。
更麻烦是,如果Broker发生异常,可能导致整个系统都无法正常运转。之前的ROS1系统,使用的就是类似这样的架构。
-
第三种,广播模型,所有节点都可以在通道上广播消息,并且节点都可以收到消息。这个模型解决了服务器地址的问题,而且通信双方也不用单独建立连接,但是广播通道上的消息太多了,所有节点都必须关心每条消息,其实很多是和自己没有关系的。
-
第四种,就是以数据为中心的DDS模型了,这种模型与广播模型有些类似,所有节点都可以在DataBus上发布和订阅消息。
但它的先进之处在于,通信中包含了很多并行的通路,每个节点可以只关心自己感兴趣的消息,忽略不感兴趣的消息,有点像是一个旋转火锅,各种好吃的都在这个DataBus传送,我们只需要拿自己想吃的就行,其他的和我们没有关系。
可见,在这几种通信模型中,DDS的优势更加明显。
DDS
DDS并不是一个新的通信方式,在ROS2之前,DDS已经广泛应用在很多领域,比如航空,国防,交通,医疗,能源等。
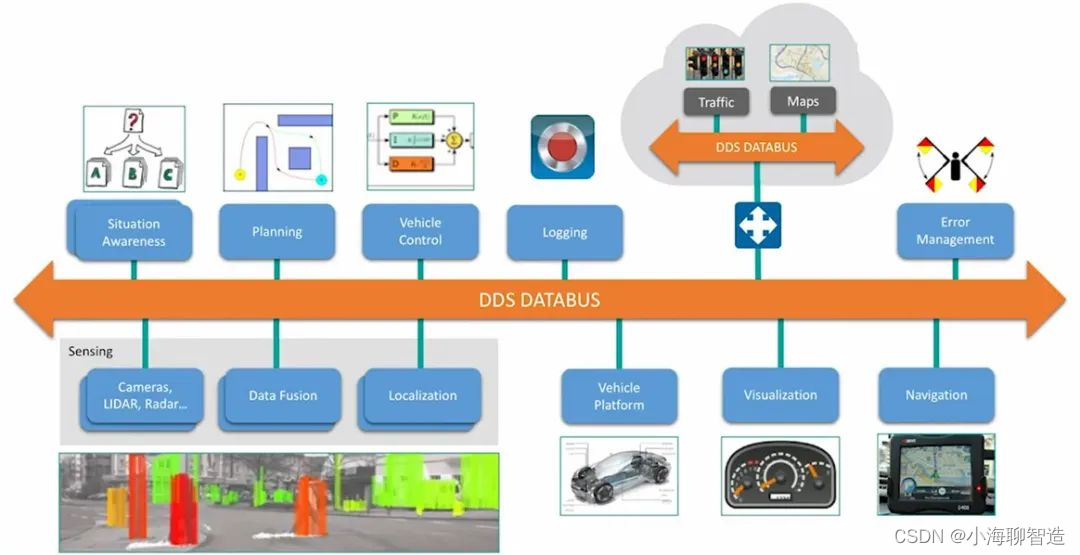
比如在自动驾驶领域,通常会存在感知,预测,决策和定位等模块,这些模块都需要非常高速和频繁地交换数据。借助DDS,可以很好地满足它们的通信需求。
什么是DDS?
好啦,说了半天DDS,到底啥意思呢?我们来做一个完整的介绍

DDS的全称是Data Distribution Service,也就是数据分发服务,2004年由对象管理组织OMG发布和维护,是一套专门为实时系统设计的数据分发/订阅标准,最早应用于美国海军, 解决舰船复杂网络环境中大量软件升级的兼容性问题,现在已经成为强制标准。
DDS强调以数据为中心,可以提供丰富的服务质量策略,以保障数据进行实时、高效、灵活地分发,可满足各种分布式实时通信应用需求。
这里也提一下对象管理组织OMG,成立于1989年,它的使命是开发技术标准,为数以千计的垂直行业提供真实的价值,比如大家课可能听说过的统一建模语言SYSML和UML,还有中间件标准CORBA等,当然还有DDS。
DDS在ROS2中的应用
DDS在ROS2系统中的位置至关重要,所有上层建设都建立在DDS之上。在这个ROS2的架构图中,蓝色和红色部分就是DDS。
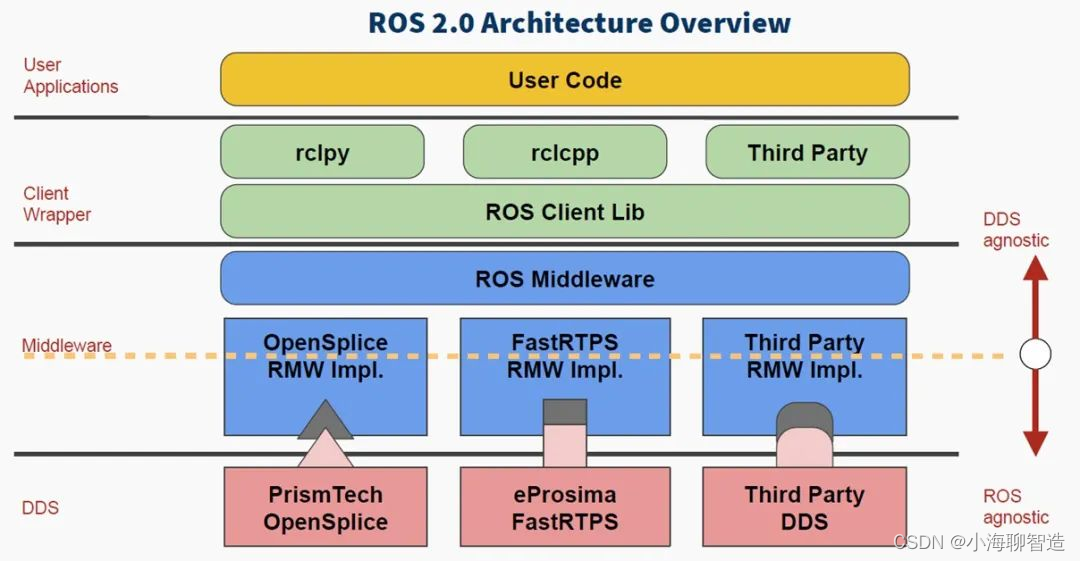
刚才我们也提到,DDS是一种通信的标准,就像4G、5G一样,既然是标准,那大家都可以按照这个标准来实现对应的功能,所以华为、高通都有很多5G的技术专利,DDS也是一样,能够按照DDS标准实现的通信系统很多,这里每一个红色模块,就是某一企业或组织实现的一种DDS系统。
既然可选用的DDS这么多,那我们该用哪一个呢?具体而言,他们肯定都符合基本标准,但还是会有性能上的差别,ROS2的原则就是尽量兼容,让用户根据使用场景选择,比如个人开发,我们选择一个开源版本的DDS就行,如果是工业应用,那可能得选择一个商业授权的版本了。
为了实现对多个DDS的兼容,ROS设计了一个Middleware中间件,也就是一个统一的标准,不管我们用那个DDS,保证上层编程使用的函数接口都是一样的。此时兼容性的问题就转移给了DDS厂商,如果他们想让自己的DDS系统进入ROS生态,就得按照ROS的接口标准,开发一个驱动,也就是这个部分。
无论如何,ROS的宗旨不变,要提高软件代码的复用性,下边DDS任你边,上边的软件没影响。
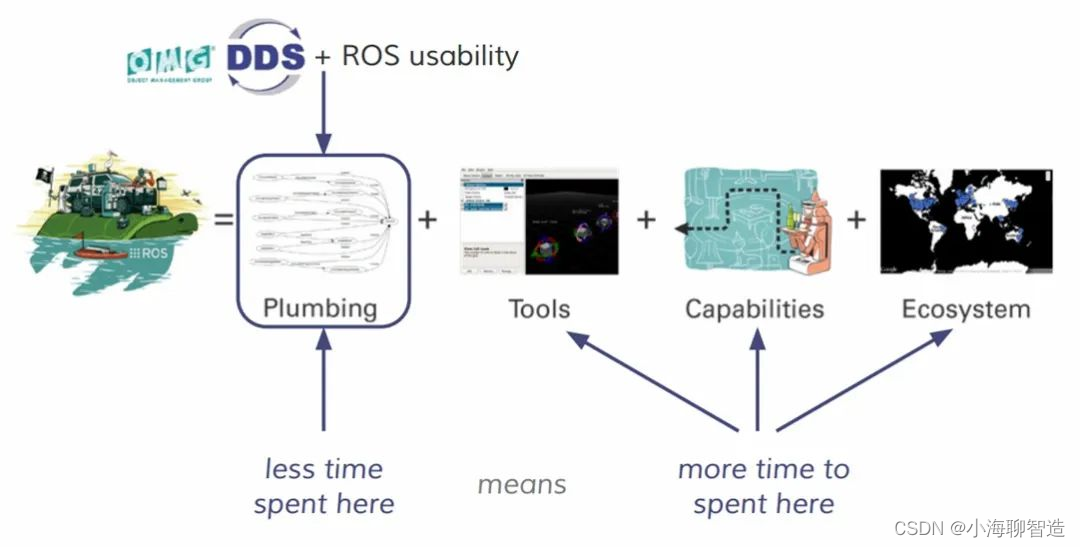
在ROS的四大组成部分中,由于DDS的加入,大大提高了分布式通信系统的综合能力,这样我们在开发机器人的过程中,就不需要纠结通信的问题,可以把更多时间放在其他部分的应用开发上。
质量服务策略QoS
DDS为ROS的通信系统提供提供了哪些特性呢?我们通过这个通信模型图来看下。
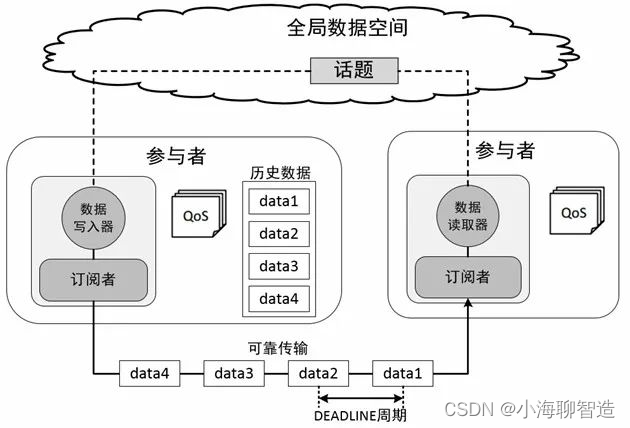
DDS中的基本结构是Domain,Domain将各个应用程序绑定在一起进行通信,回忆下之前我们配置树莓派和电脑通信的时候,配置的那个DOMAIN ID,就是对全局数据空间的分组定义,只有处于同一个DOMAIN小组中的节点才能互相通信。这样可以避免无用数据占用的资源。
DDS中另外一个重要特性就是质量服务策略,QoS。
QoS是一种网络传输策略,应用程序指定所需要的网络传输质量行为,QoS服务实现这种行为要求,尽可能地满足客户对通信质量的需求,可以理解为数据提供者和接收者之间的合约。
具体会有哪些策略?比如:
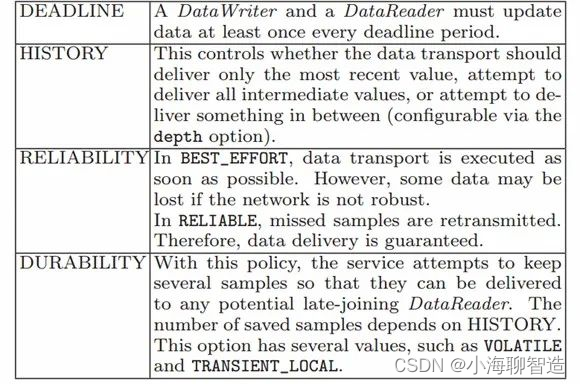
DEADLINE策略: 表示通信数据必须要在每次截止时间内完成一次通信;
HISTORY策略: 表示针对历史数据的一个缓存大小;
RELIABILITY策略: 表示数据通信的模式,配置成BEST_EFFORT,就是尽力传输模式,网络情况不好的时候,也要保证数据流畅,此时可能会导致数据丢失,配置成RELIABLE,就是可信赖模式,可以在通信中尽量保证图像的完整性,我们可以根据应用功能场景选择合适的通信模式;
DURABILITY策略,可以配置针对晚加入的节点,也保证有一定的历史数据发送过去,可以让新节点快速适应系统。
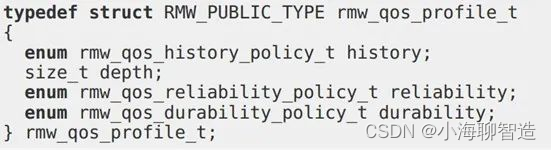
所有这些策略在ROS系统中都可以通过类似这样的结构体配置,如果不配置的话,系统也会使用默认的参数。
举一个机器人的例子便于大家理解。
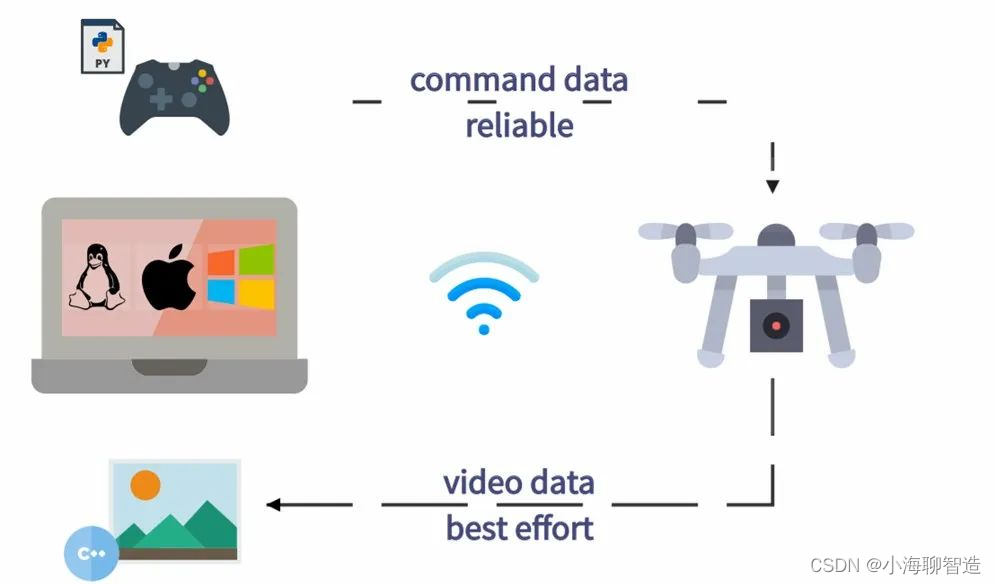
比如我们遥控一个无人机航拍,如果网络情况不好的话,遥控器向无人机发送运动指令的过程,可以用reliable通信模式,保证每一个命令都可以顺利发送给无人机,但是可能会有一些延时,无人机传输图像的过程可以用best effort模式,保证视频的流畅性,但是可能会有掉帧。
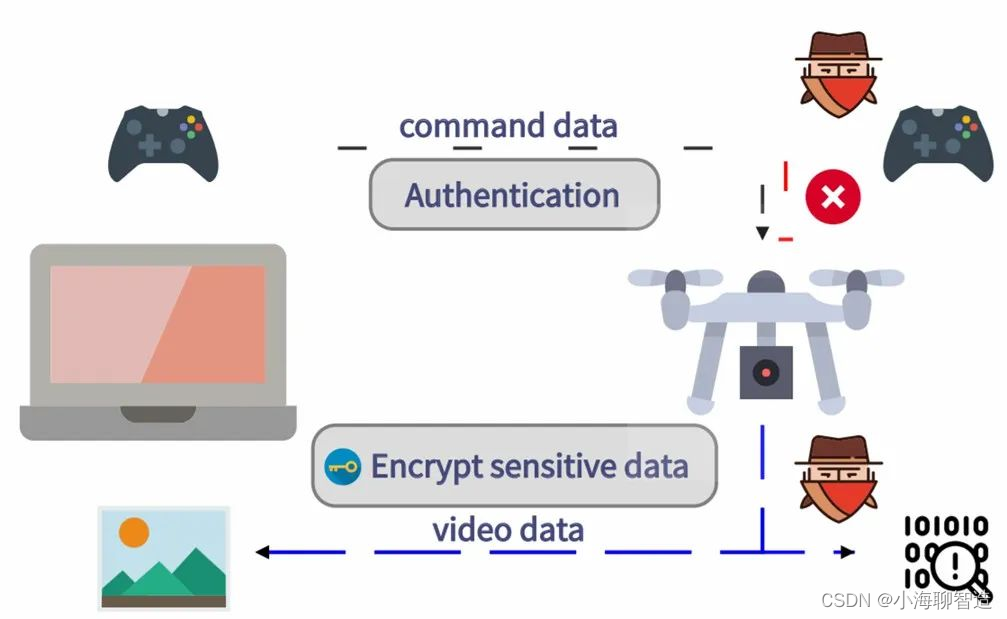
如果此时出现一个黑客黑入我们的网络,也没有关系,我们可以给ROS2的通信数据进行加密,黑客也没有办法直接控制无人机。
DDS的加入,让ROS2的通信系统焕然一新,多众多样的通信配置,可以更好的满足不同场景下的机器人应用。
好啦,DDS这么好,那该如何配置和使用呢?我们先带大家入个门。
案例一:在命令行中配置DDS
我们先来试一试在命令行中配置DDS的参数。
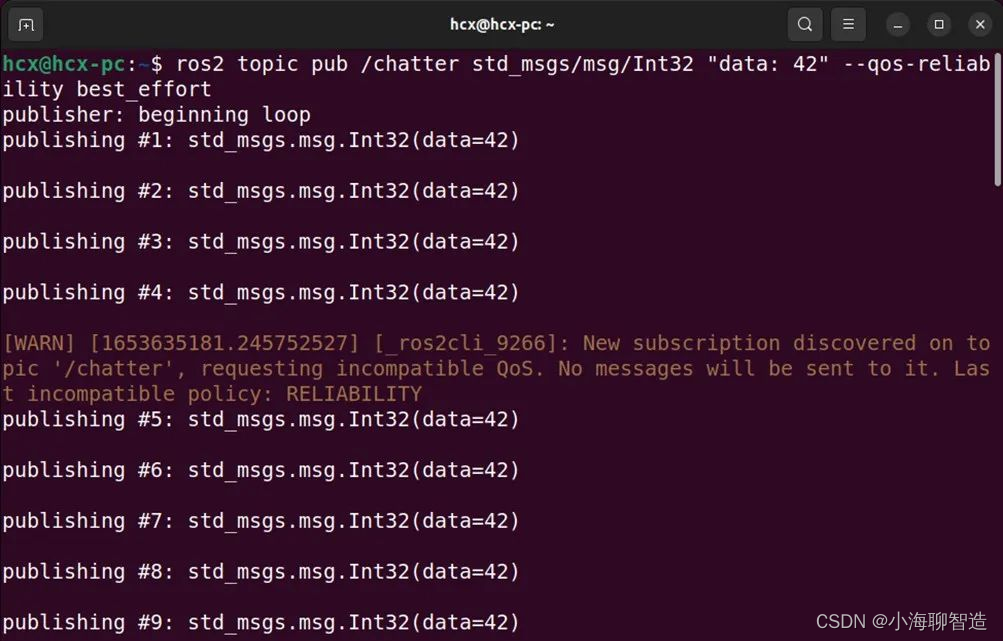
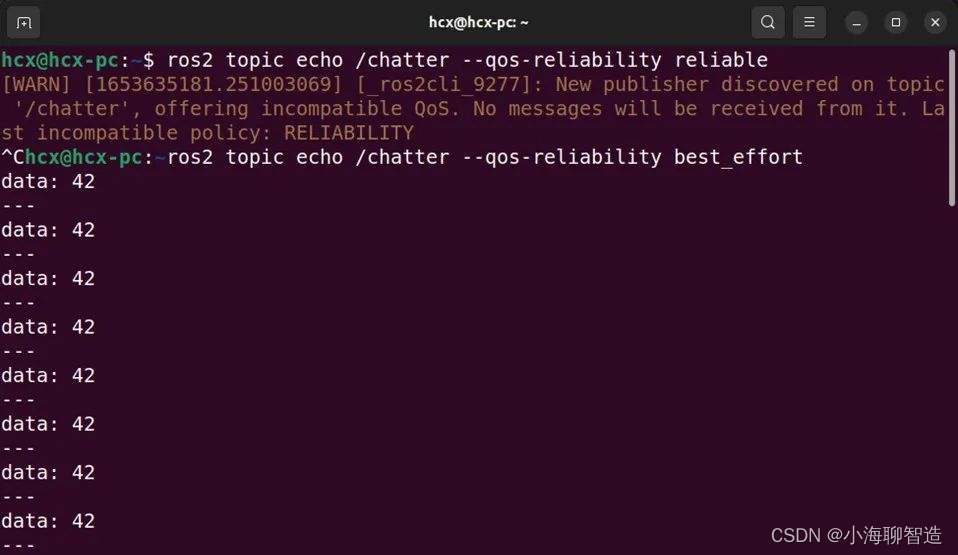
启动第一个终端,我们使用best_effort创建一个发布者节点,循环发布任意数据,在另外一个终端中,如果我们使用reliable模型订阅同一话题,无法实现数据通信,如果修改为同样的best_effort,才能实现数据传输。
ros2 topic pub /chatter std_msgs/msg/Int32 "data: 42" --qos-reliability best_effort $ ros2 topic echo /chatter --qos-reliability reliable$ ros2 topic echo /chatter --qos-reliability best_effort
如何去查看ROS2系统中每一个发布者或者订阅者的QoS策略呢,在topic命令后边跟一个"–verbose"参数就行了。
ros2 topic info /chatter --verbose
案例二:DDS编程示例
接下来,我们尝试在代码中配置DDS,以之前Hello World话题通信为例。

运行效果
启动两个终端,分别运行发布者和订阅者节点:
ros2 run learning_qos qos_helloworld_pub$ ros2 run learning_qos qos_helloworld_sub
可以看到两个终端中的通信效果如下,和之前貌似并没有太大区别。


看效果确实差不多,不过底层通信机理上可是有所不同的。
发布者代码解析
我们看下在代码中,如果加入QoS的配置。
learning_qos/qos_helloworld_pub.py
#!/usr/bin/env python3# -- coding: utf-8 --“”“@作者: 古月居(www.guyuehome.com)@说明: ROS2 QoS示例-发布“Hello World”话题”““import rclpy # ROS2 Python接口库from rclpy.node import Node # ROS2 节点类from std_msgs.msg import String # 字符串消息类型from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy # ROS2 QoS类””“创建一个发布者节点”""class PublisherNode(Node): def init(self, name): super().init(name) # ROS2节点父类初始化 qos_profile = QoSProfile( # 创建一个QoS原则 # reliability=QoSReliabilityPolicy.BEST_EFFORT, reliability=QoSReliabilityPolicy.RELIABLE, history=QoSHistoryPolicy.KEEP_LAST, depth=1 ) self.pub = self.create_publisher(String, “chatter”, qos_profile) # 创建发布者对象(消息类型、话题名、QoS原则) self.timer = self.create_timer(0.5, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数) def timer_callback(self): # 创建定时器周期执行的回调函数 msg = String() # 创建一个String类型的消息对象 msg.data = ‘Hello World’ # 填充消息对象中的消息数据 self.pub.publish(msg) # 发布话题消息 self.get_logger().info(‘Publishing: “%s”’ % msg.data)# 输出日志信息,提示已经完成话题发布def main(args=None): # ROS2节点主入口main函数 rclpy.init(args=args) # ROS2 Python接口初始化 node = PublisherNode(“qos_helloworld_pub”) # 创建ROS2节点对象并进行初始化 rclpy.spin(node) # 循环等待ROS2退出 node.destroy_node() # 销毁节点对象 rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={ 'console_scripts': [ 'qos_helloworld_pub = learning_qos.qos_helloworld_pub:main',},
订阅者代码解析
订阅者中的QoS配置和发布者类似。
learning_qos/qos_helloworld_sub.py
"import rclpy # ROS2 Python接口库from rclpy.node import Node # ROS2 节点类from std_msgs.msg import String # ROS2标准定义的String消息from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy # ROS2 QoS类"""创建一个订阅者节点"""class SubscriberNode(Node): def __init__(self, name): super().__init__(name) # ROS2节点父类初始化 qos_profile = QoSProfile( # 创建一个QoS原则 # reliability=QoSReliabilityPolicy.BEST_EFFORT, reliability=QoSReliabilityPolicy.RELIABLE, history=QoSHistoryPolicy.KEEP_LAST, depth=1 ) self.sub = self.create_subscription(\ String, "chatter", self.listener_callback, qos_profile) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、QoS原则) def listener_callback(self, msg): # 创建回调函数,执行收到话题消息后对数据的处理 self.get_logger().info('I heard: "%s"' % msg.data) # 输出日志信息,提示订阅收到的话题消息def main(args=None): # ROS2节点主入口main函数 rclpy.init(args=args) # ROS2 Python接口初始化 node = SubscriberNode("qos_helloworld_sub") # 创建ROS2节点对象并进行初始化 rclpy.spin(node) # 循环等待ROS2退出 node.destroy_node() # 销毁节点对象 rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={ 'console_scripts': [ 'qos_helloworld_pub = learning_qos.qos_helloworld_pub:main', 'qos_helloworld_sub = learning_qos.qos_helloworld_sub:main', ],},
DDS本身是一个非常复杂的系统,ROS2使用的也只是冰山一角,我们主要带领大家认识DDS,更多使用方法和相关内容,大家也可以参考下边的链接进行学习。
参考链接
https://design.ros2.org/articles/ros_on_dds.html
https://docs.ros.org/en/humble/Concepts/About-Different-Middleware-Vendors.html
https://docs.ros.org/en/humble/How-To-Guides/Working-with-multiple-RMW-implementations.html
https://www.bilibili.com/video/BV12z4y167w2
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!