《密集环境下编队飞行的分布式集群轨迹优化》论文解读二
2023-12-18 17:38:04
目录
2.?Optimization Problem F ormulation
2.4 swarm formation similarity
2.5 swarm reciprocal avoidance
请先阅读《密集环境下编队飞行的分布式集群轨迹优化》论文解读一-CSDN博客
1.时空轨迹表示
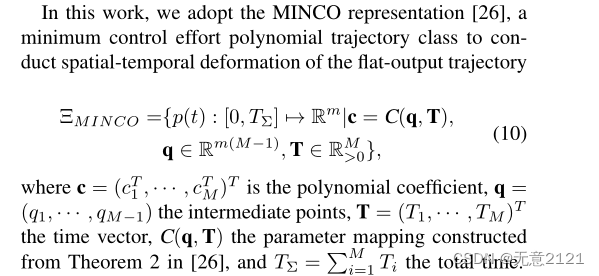
这个工作采用最小控制力+多项式轨迹类型对平坦输出轨迹进行时空变形
M代表有M个时间节点即该时空多项式轨迹有M个片段,从而有M-1个中间点
m代表输出空间的维度
c中包含了M段多项式的所有系数
| minimum control effort | 最小控制力 |
| polynomial trajectory | 多项式轨迹 |
| spatial-temporal | 时空 |
| deformation | 变形 |
| flat-output | 平坦输出 |
| where XXX is the polymial coefficient | XXX是多项式系数 |
| intermediate point | 中间点 |
| parameter mapping | 参数映射 |
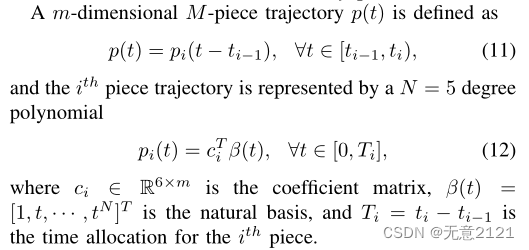
?这是一个多维多段多项式轨迹定义的描述,比较经典
| a m-dimensional M-piece trajectory | 一个m维M段轨迹 |
| coefficient matrix | 系数矩阵 |
| natural basis | 自然基 |
| time allocation | 时间分配 |
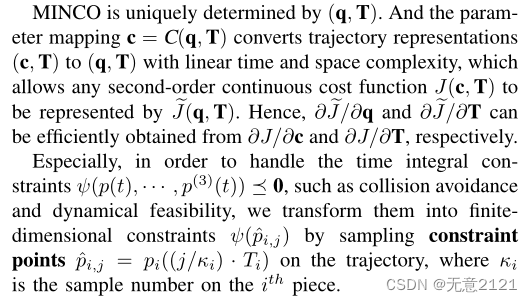
参数映射通过线性时间复杂度与空间复杂度将轨迹转化,使代价函数可以二阶连续
为了解决时间积分约束,如避障和动态可行性,通过采样将其转化为有限维度约束
| linear time and space complexity | 线性时间复杂度与空间复杂度 |
| second-order | 二阶 |
| can be efficiently obtained from XXX and XXX, respectively | 可以有效地从XXX和XXX分别得出 |
| in order to handle | 为了解决 |
| time integral constraints | 时间积分约束 |
| finite-dimensional constraints | 有限维度约束 |
| transfrom XXX into XXX by | 转化XXX到XXX通过 |
| sample constraint points | 采样约束点 |
2.?Optimization Problem F ormulation
2.1?control effort

?对控制量的代价函数设计采用三阶,也就是jerk的平方的积分
2.2 total time

?缩小总时间能够确保轨迹的侵略性,防止为了避障而运动缓慢等情况
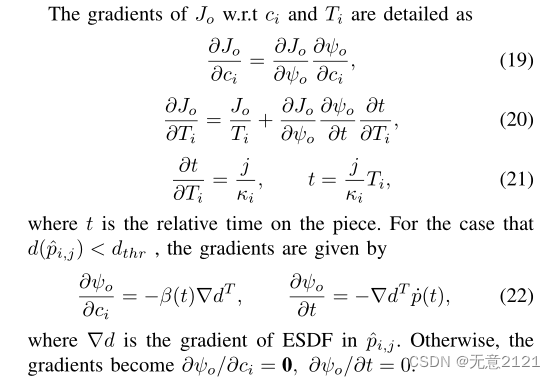
2.3 obstacle avoidance

?避障的成本利用ESDF进行计算,代价函数的意义是惩罚小于安全距离的约束点
?最后一句话我不是很理解,感觉上就是每一段piece的两个端点都要计算一遍,累加起来就形成了这样的权重
注意避障的代价不能随着采样点的增多而变大,应该随时间变化,所以乘了Ti/ki
| safety threshold | 安全阈值 |
| the considerable point | 该点 |
| can be efficiently obtained from XXX and XXX, respectively | 可以有效地从XXX和XXX分别得出 |
| XXX is obtained by computing the weighted sum of XXX | XXX通过计算XXX的权重和来得到 |
| orthogonal coefficient | 正交系数 |
| trapezoidal rule | 梯形规则 |
2.4 swarm formation similarity
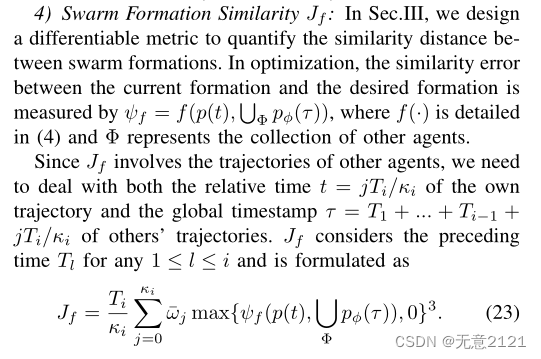
?在之前,定义过了编队相似性距离,但是在优化框架中,我们需要解决相对时间的问题
| XXX are detailed/formulated as | 后面接公式 |
| for the case that XXX,XXX are given by | 该点 |
| collection | 集合 |
| relative time | 相对时间 |
| global timestamp | 全局时间戳 |
| proceding time | 处理时间 |
2.5 swarm reciprocal avoidance
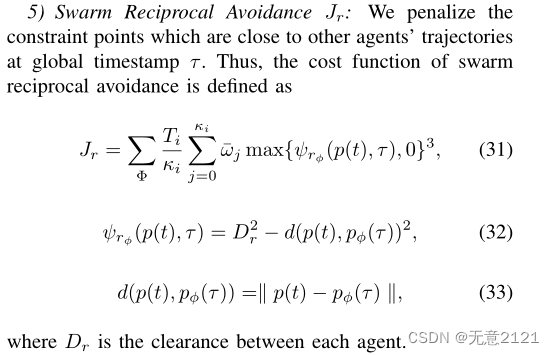
?确保集群内部不撞,个人认为这个地方不够优化,存在大量冗余的约束
动力学可行性要求在速度、加速度、加加速度有范围
约束点的均匀分布要求约束点在空间范围内尽量均匀,防止出现两个约束点之间有障碍物,以及不均匀导致轨迹不平滑等等问题
| reciprocal avoidance | 相互避障 |
| clearance between | XXX与XXX之之间的间隙 |
| Readers can refer to XXX for more details. | 读者可以参考XXX了解更多详细信息 |
| uniform distribution? | 均匀分布 |
| are expected to be space-uniform | 期望是空间均匀的 |
| prevent constraint points from gathering in certain locations | 防止约束点聚集在某些位置 |
文章来源:https://blog.csdn.net/weixin_65089713/article/details/135062520
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!