人工智能_机器学习061_KKT条件公式理解_原理深度解析_松弛变量_不等式约束---人工智能工作笔记0101
2023-12-14 16:52:12

然后我们再来看,前面我们,拉格朗日乘子法,把带有条件的,问题,优化成了等式问题,从而,
构建拉格朗日乘子公式,进行实现了求解,但是在现实生活中,往往也有,很多不等式问题.
比如上面的这个,就是要求是h(x)<=0的情况下,函数f(x)的最小值.
可以看到,这个带有一个不等式的条件,那么这种的如何求呢
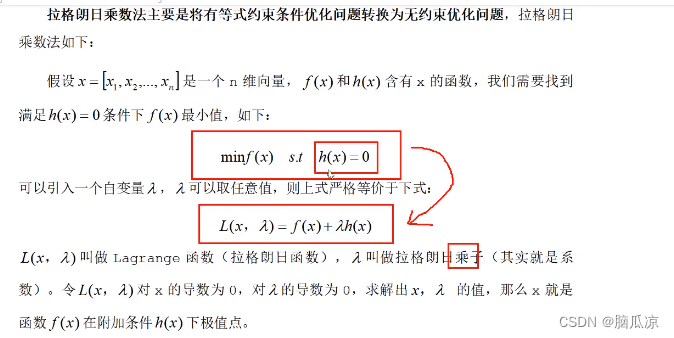
我们可以回去看看拉格朗日乘子法的公式,可以看到是一个等式条件,这个时候可以,引入拉格朗日乘子,构建拉格朗日乘子法公式,来进行求解,但是不等式怎么做呢?
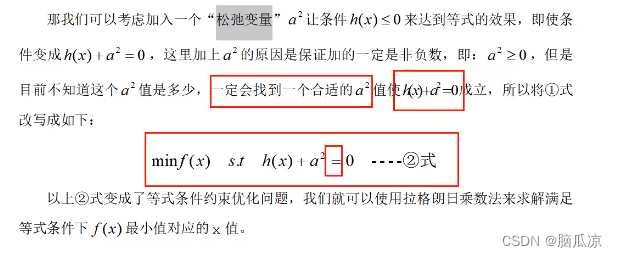
我们可以看到,这个时候,我们可以引入一个,松弛变量,可以看到这个松弛变量,我们让他是阿尔法,
然后添加一个阿尔法的平方,因为我们知道h(x)<=0 是小于=0的,所以我们就可以加一个大于等于0的数,那么这样就可以让h(x) + 阿尔法 ^2 = 0了,因为这里的阿尔法是加了平方,肯定是大于0的.
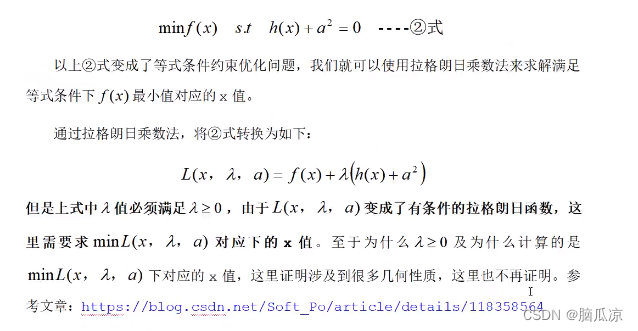
有了等式以后,这个时候我们就可以转换一下,使用拉格朗
文章来源:https://blog.csdn.net/lidew521/article/details/134796245
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!