RobotMaster学习——工序导入,参数设置,轨迹生成
2023-12-22 20:29:05
引出
RobotMaster的操作流程,从导入工序到生产轨迹。
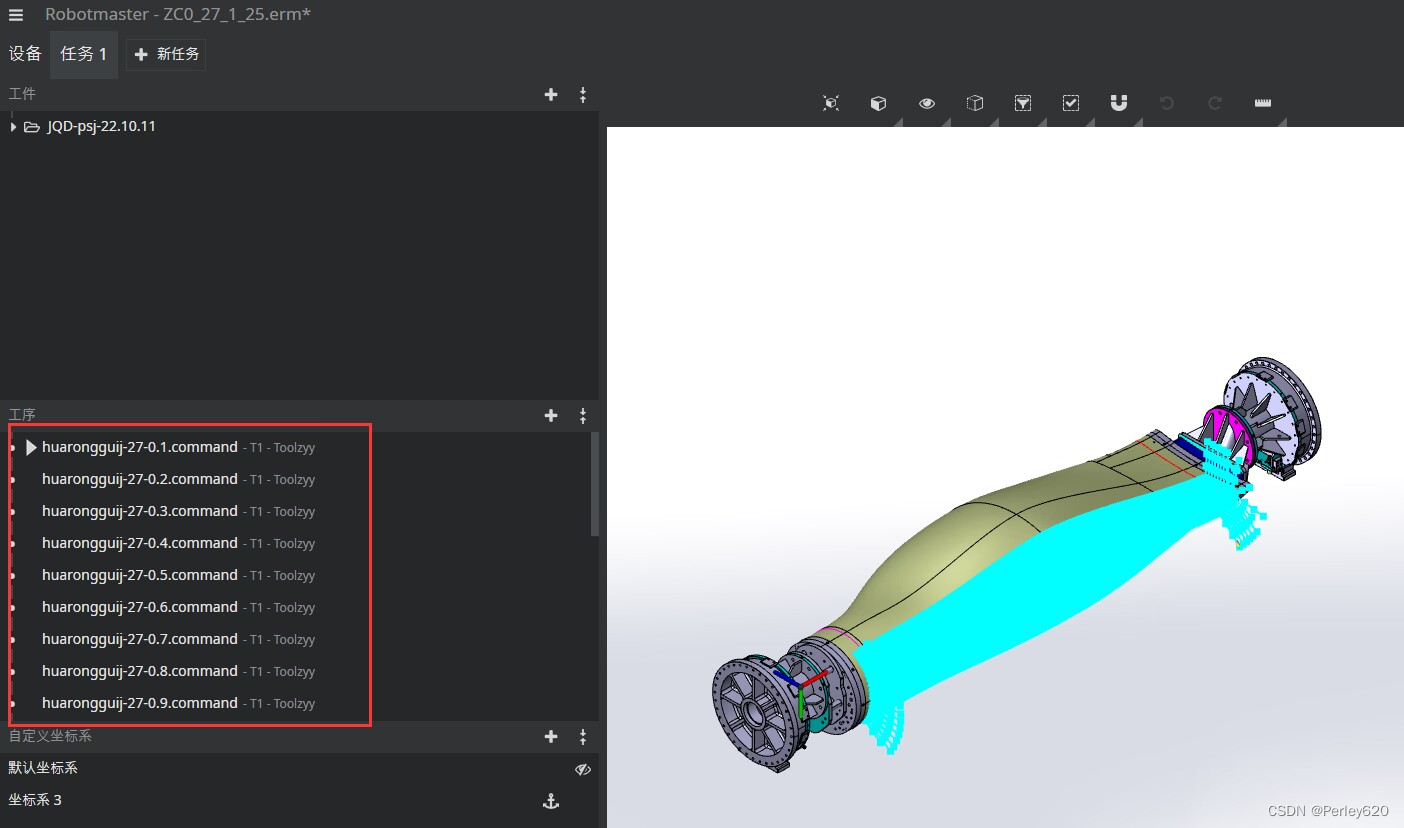
1.导入工序
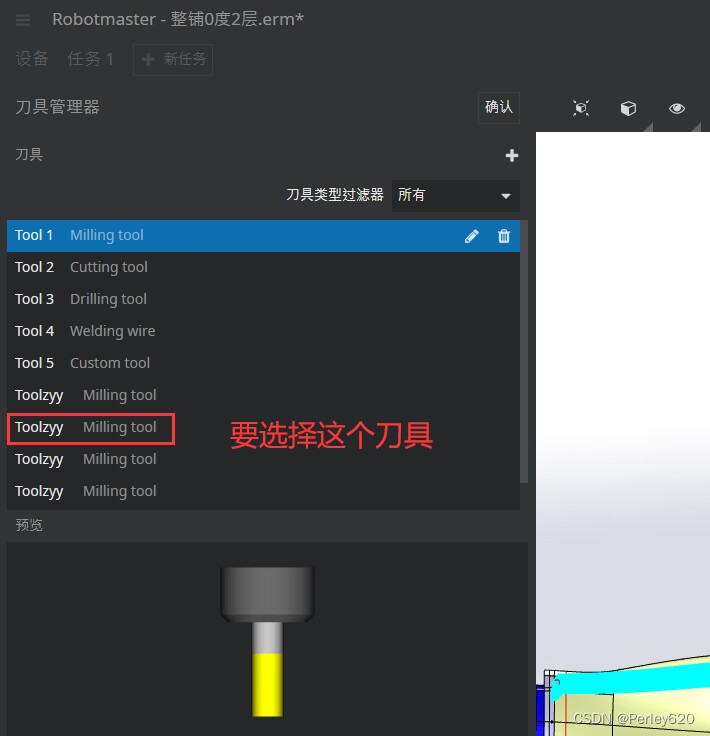
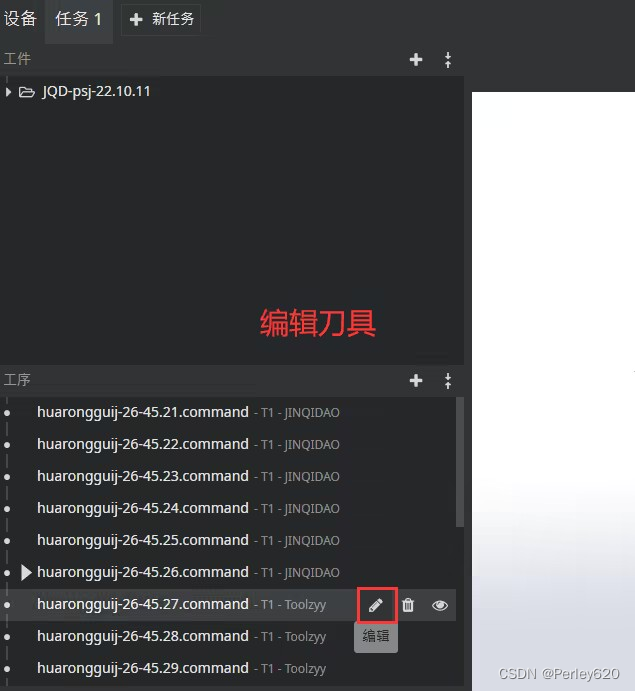
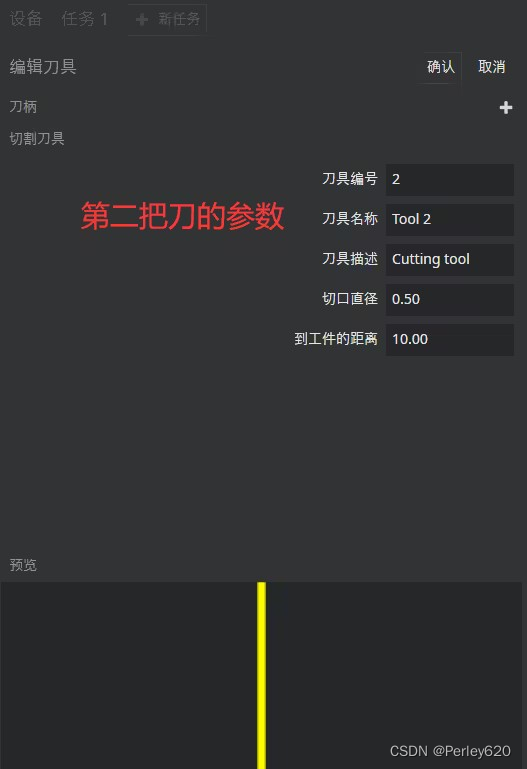
2.修改刀具
要选择第七把刀具
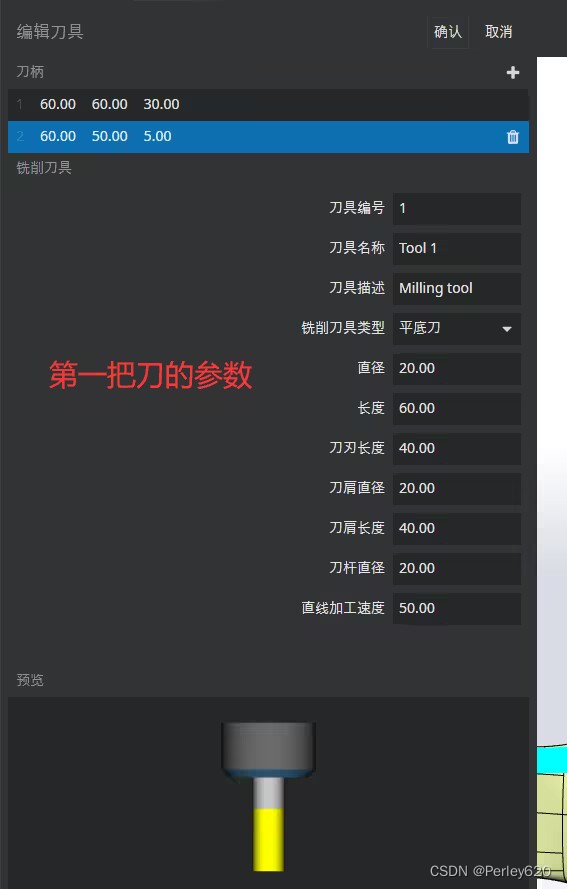
其他刀具参数
第一把刀具
第二把刀具
第三把刀具

第四把刀具

第五把刀具

第6把刀具

第7把刀具

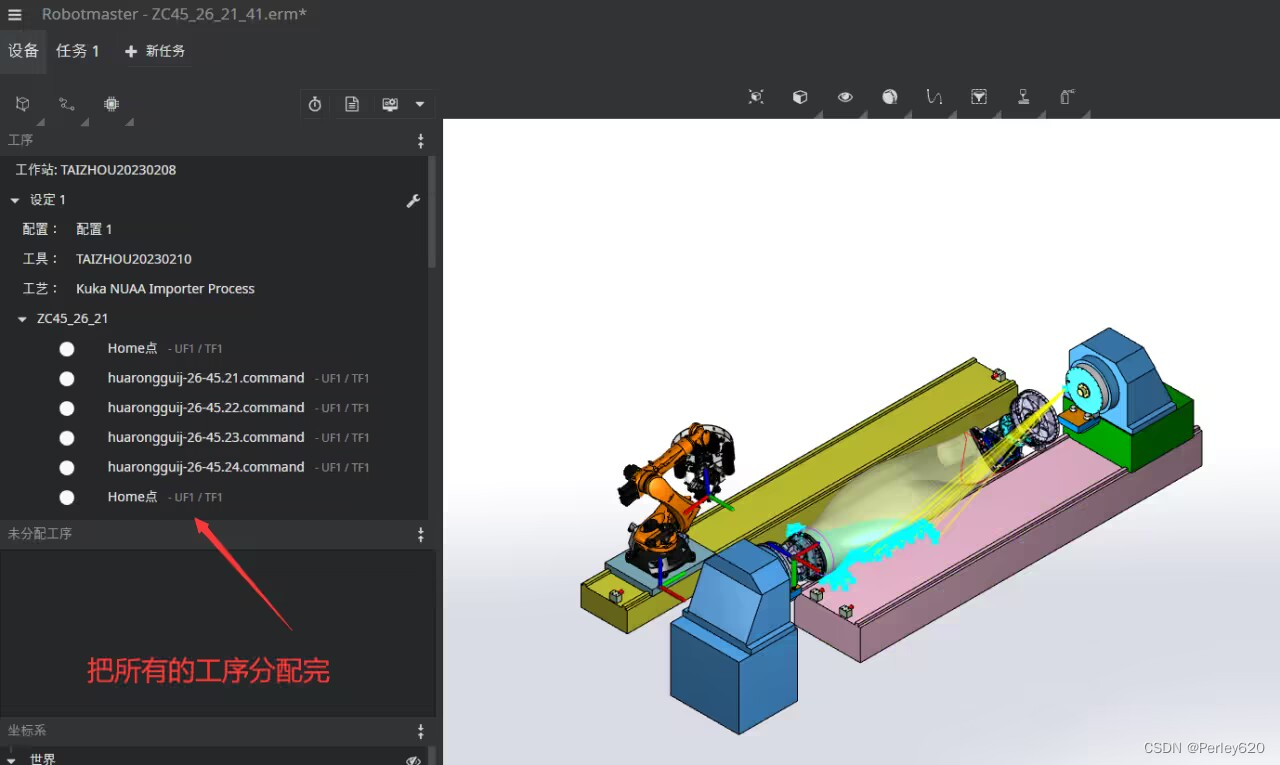
3.进行工序分配
分配工序到每一个子程序中,这里有几个子程序,后面就会根据其中的工序生成代码文件

分配完所有的工序
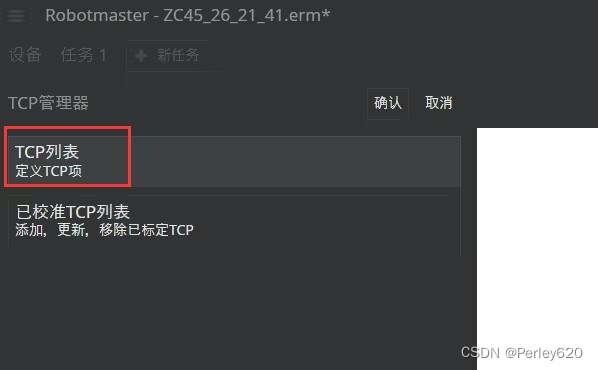
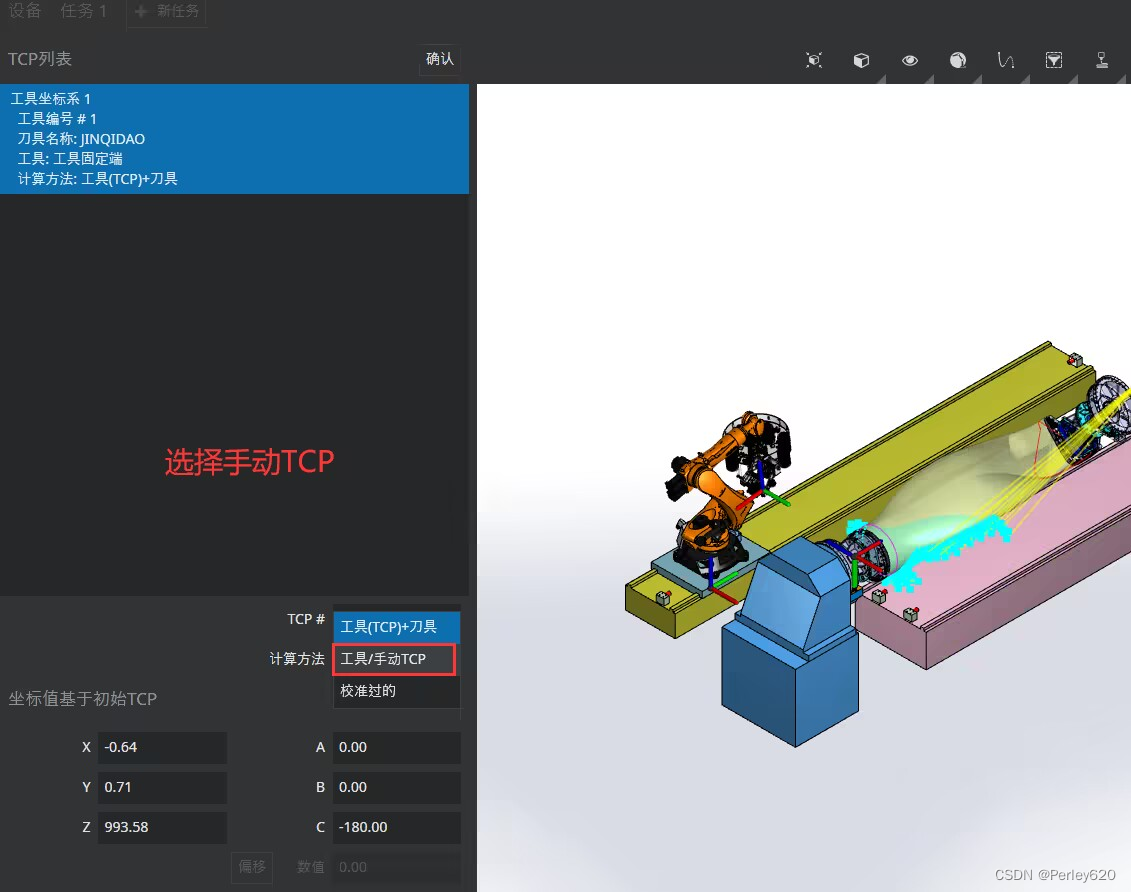
4.设置TCP
接下来就是进行参数的设置
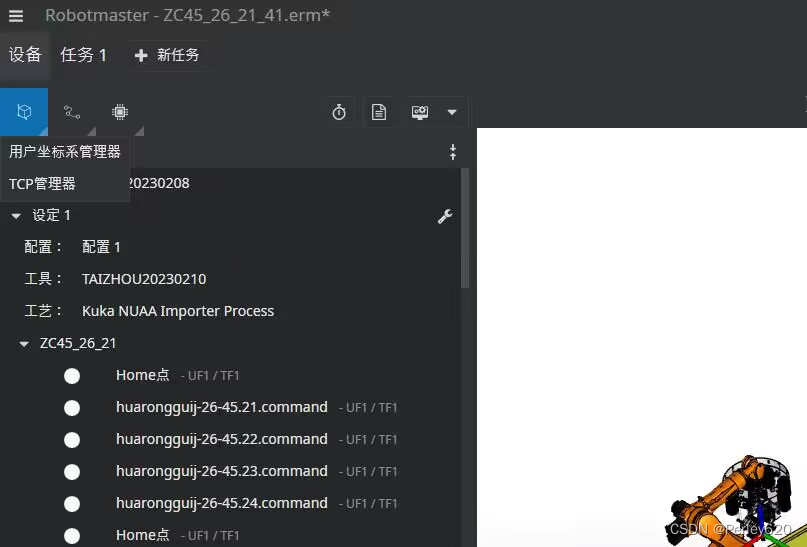
选择TCP列表
选择手动TCP
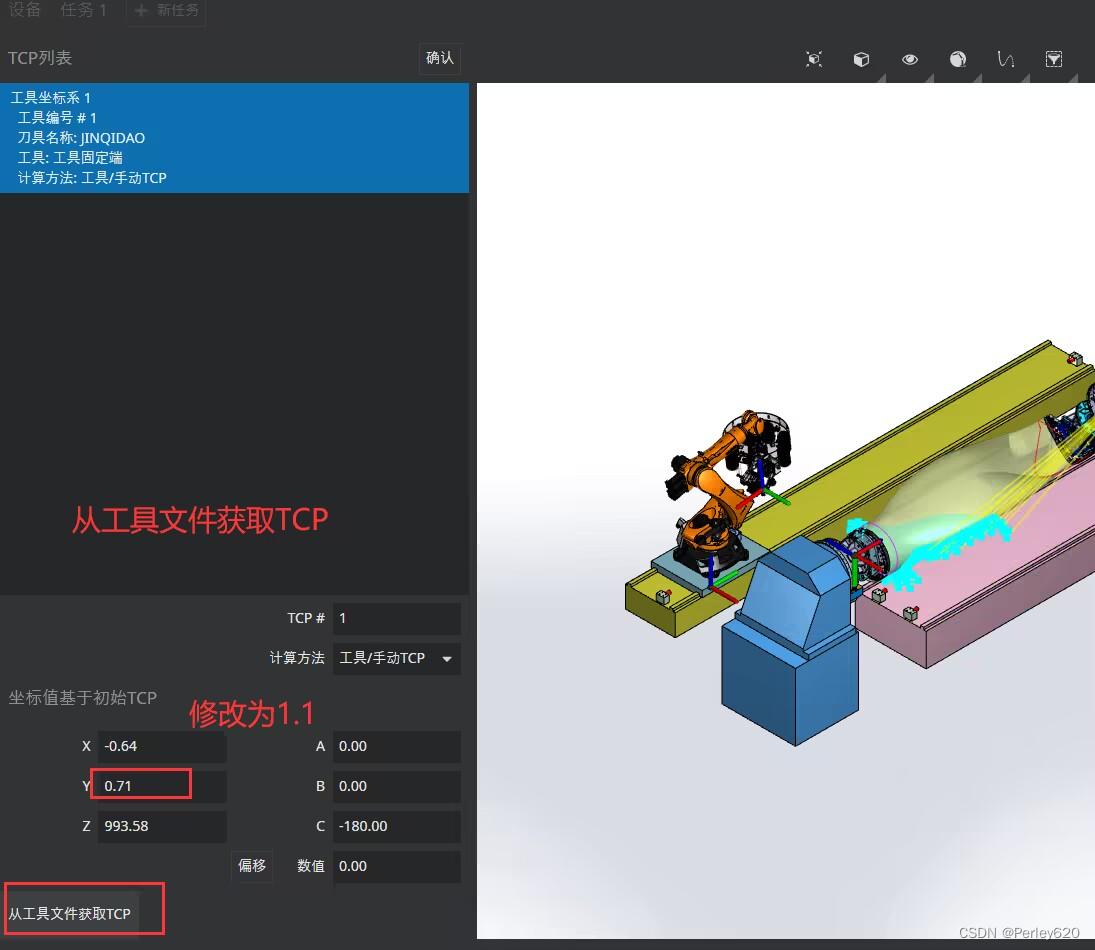
从文件获取TCP
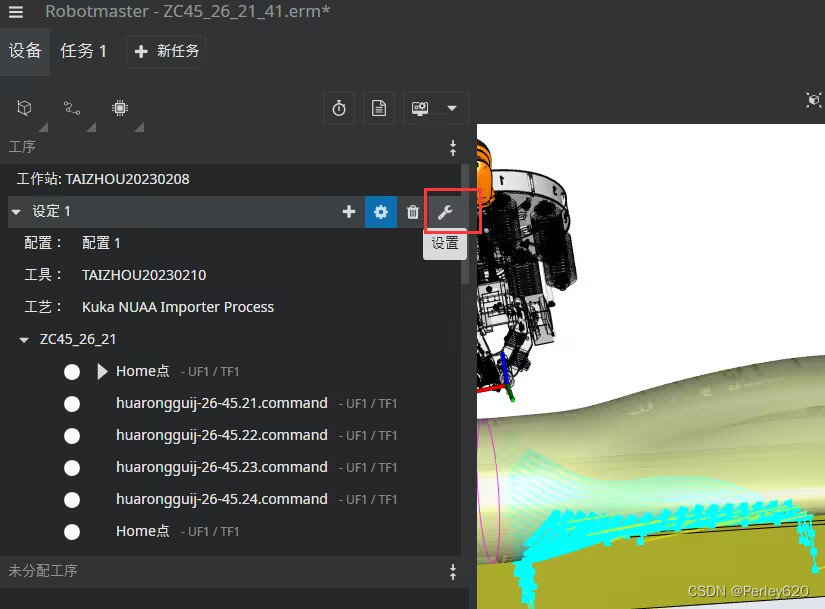
5.设置工作站
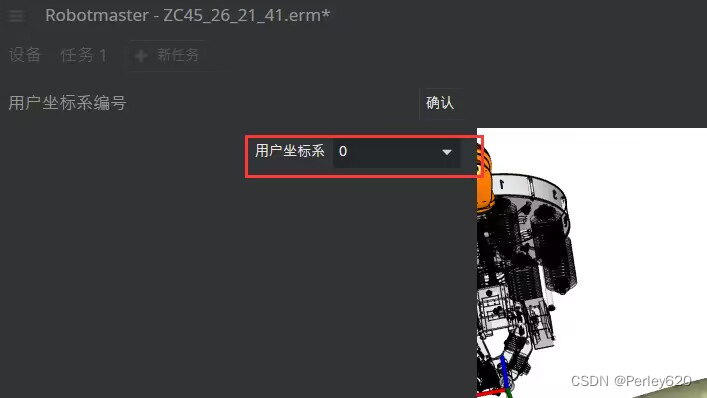
设置用户坐标系编号

选择用户坐标系编号为0
6.工序整体导入配置
如果是0度,要设置成无偏移,其余情况设置成压辊5度

7.进行计算
点击计算按钮,进行仿真
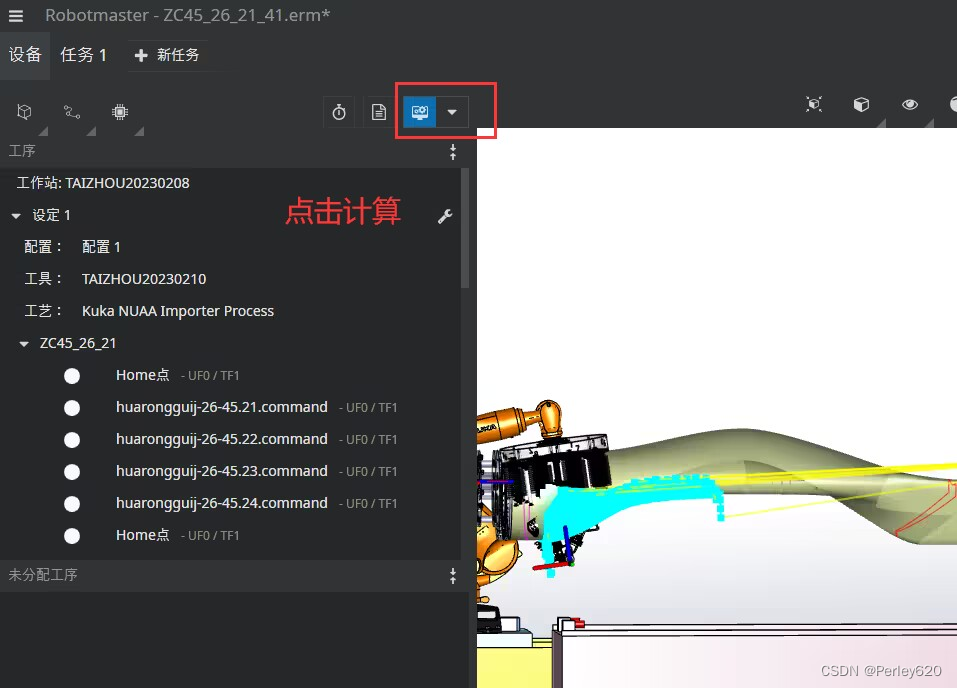
需要保证仿真出来的轨迹没有问题:
1.不能出现干涉;
2.机器人可达,不能出现限位;
总结
RobotMaster的操作流程,从导入工序到生产轨迹。
文章来源:https://blog.csdn.net/Pireley/article/details/135158882
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!