路径规划之RRT *算法
2023-12-21 23:51:39
系列文章目录
路径规划之Dijkstra算法
路径规划之Best-First Search算法
路径规划之A *算法
路径规划之D *算法
路径规划之PRM算法
路径规划之RRT算法
路径规划之RRT *算法
前言
之前提到过RRT算法,现在简单提一下它的改进算法RRT*。
一、RRT算法
1.起源
RRT*是由Steven M. LaValle于2006年首次提出。
2.改进
之前RRT算法的流程已经提过了,说一下RRT算法做出的改进,RRT算法相比于RRT算法做了两点改进,分别是重新选择父节点和重布线。
2.1 重新选择父节点
RRT算法每次迭代都会得出一个新节点p_new,再将p_new与最近的节点相连接p_near相连接。
而RRT *算法第一个改进就是为p_new选择新的父节点(RRT算法选择的父节点就是p_near,即最近节点),而RRT *算法则是以p_new为圆心,在指定的搜索半径内找到从起点到p_new路径代价最小的点。
2.2 重新布线
在第一步改进完成后,继续在p_new的搜索范围内进行搜索,计算该范围内的节点在将p_new修改成自己的父节点后,从起点到它的路径代价是否减少,若减少则更新路径。
3.对比RRT
| 内容 | RRT | RRT * |
|---|---|---|
| 实现 | 相对简单 | 相对复杂 |
| 收敛性 | RRT在有限时间内可以找到一条可行路径,但不一定是最优的 | 在理论上具有渐近最优的性质,即在不断迭代的过程中,生成的路径趋向于全局最优 |
| 适用场景 | 适用于实时路径规划问题,尤其是在高维和复杂环境中 | 更适用于强调全局最优性能的问题,即使在计算开销较高的情况下也能找到更优的路径 |
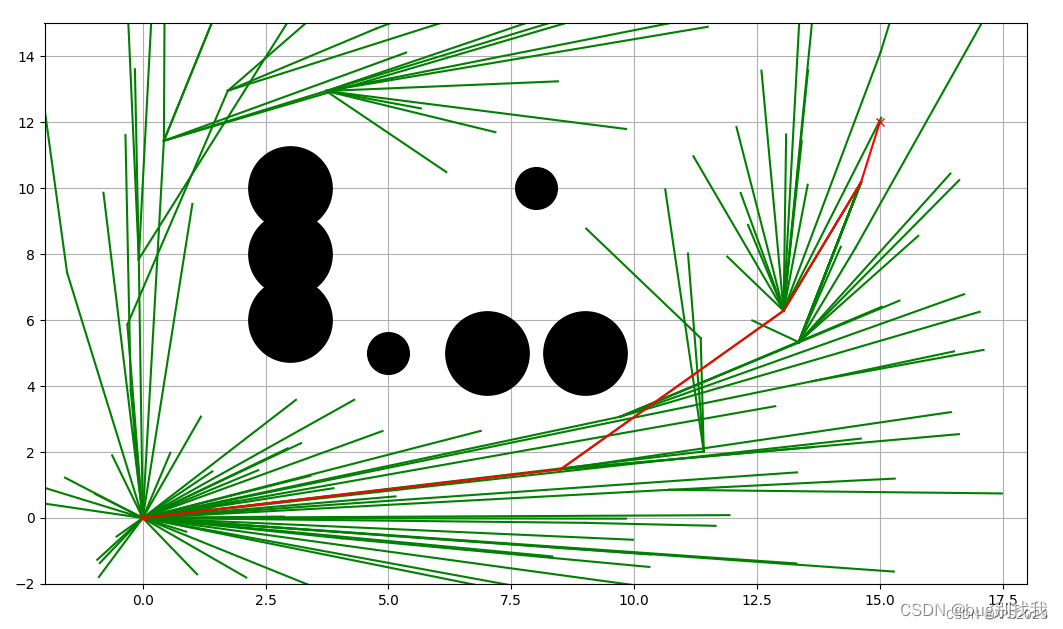
4.结果
文章来源:https://blog.csdn.net/weixin_43575792/article/details/135141085
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!