14光线追踪(加速结构)
1.Uniform Spatial Partitions(Grids)—均匀空间划分
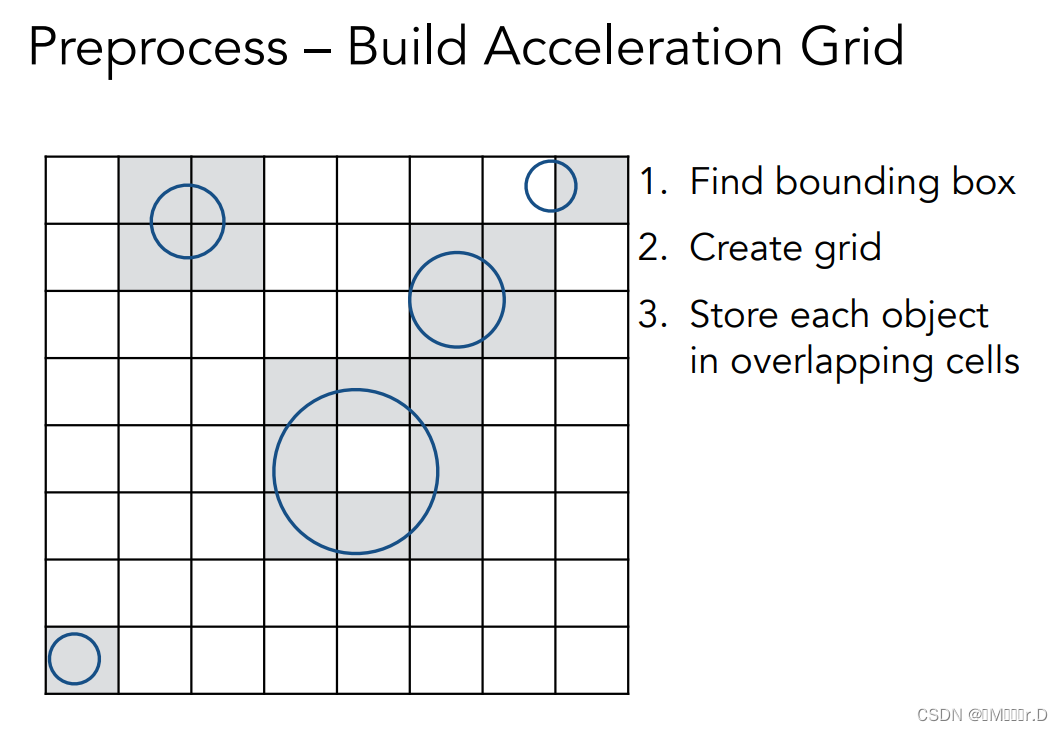
1.1场景预处理
- Find bounding box
- Create grid
- Store each object in overlapping cells判断哪些网格可能有物体,有物体的格子做上特殊标记
1.2开始光线追踪
开始做光追→ 光线到有物体的格子 → 判断是否有交点
如果在一个小格子中既有物体又有光线,那么说明光线和物体可能有交点,就在这个格子里进行光线与物体表面的求交计算,否则就不会计算。那么我们怎么知道光线穿过了哪些格子呢?要一个一个进行求交计算吗?实际上是不需要的,这里其实可以用到光栅化直线的算法,如引入增量运算的Bresenham算法等,直接可以计算在光线在哪一个格子内,以及下一个格子是谁

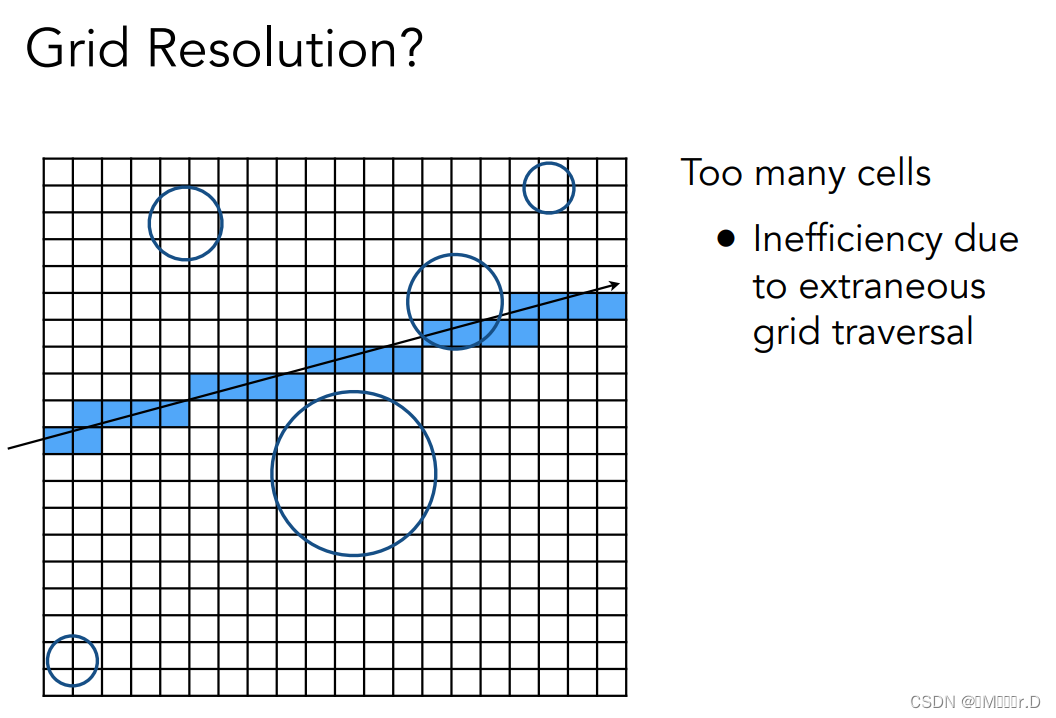
1.3格子的划分
划分的如果太稀疏,假如不划分,只用一个大包围盒,那相当于没有加速结构,而如果划分的太密集我们又要多次计算光线与小网格的求交。而经过不断的尝试人们发现,划分网格的数量应该等于某一个常数C乘上场景中物体的数量。

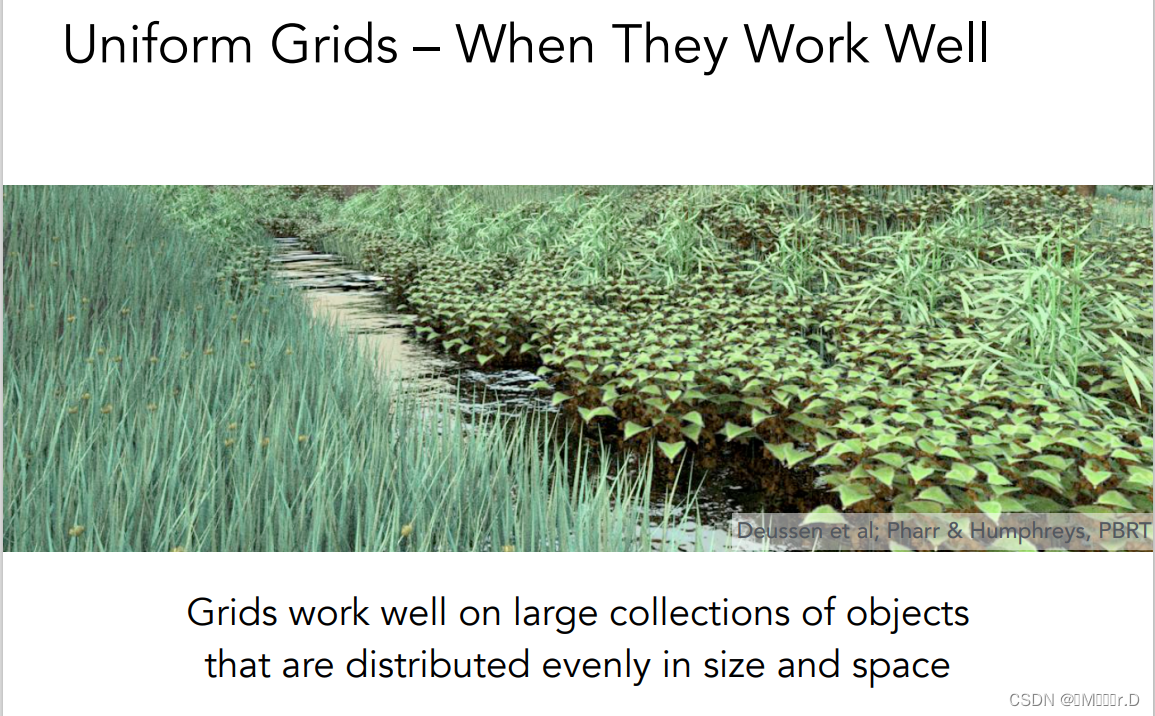
1.4适用场景
大小、空间分布均匀的场景,不适用空旷的场景
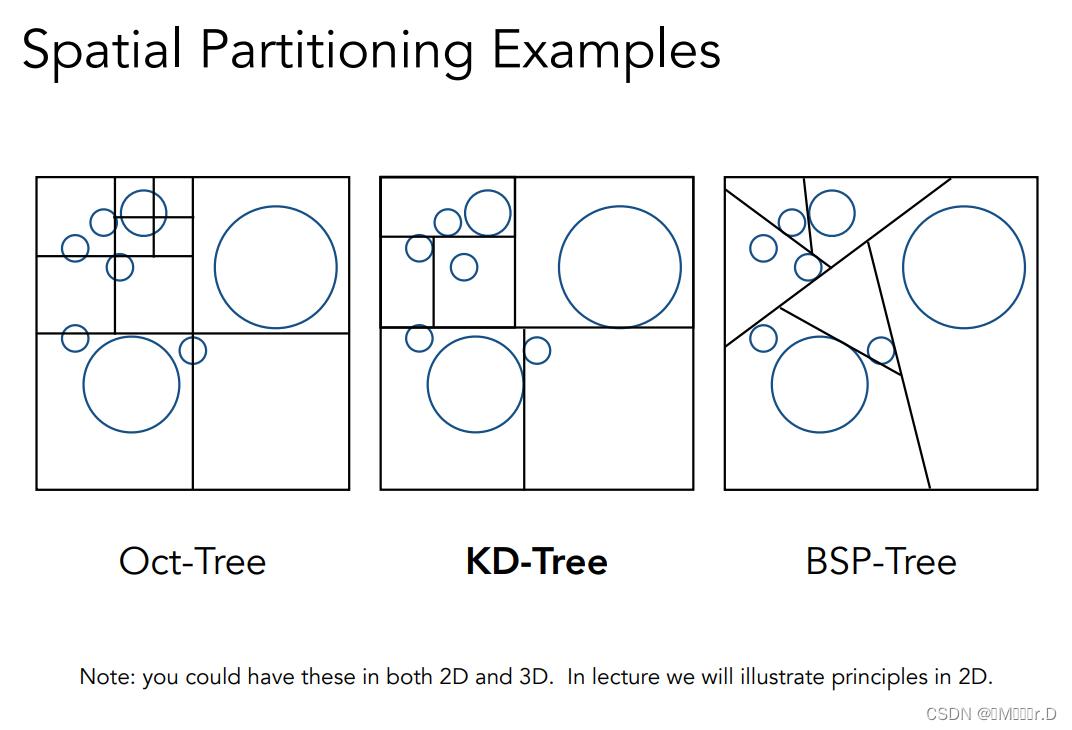
2.Spatial Partitions—空间划分(KDtree)
Oct-Tree(八叉树),KD-Tree(KD树),BSP-Tree(二叉空间划分树)。这里主要介绍KD-Tree,原因是KD-Tree在高维仍然很好用,而像八叉树在二维空间中是四叉树,三维空间是八叉树,更高维的空间就变成了2的n次方叉树。而BSP树,在二维空间我们是用线划分,三维空间用平面划分,而高维空间我们则需要用超平面划分,也很麻烦。而KD树的做法是各个维度按顺序依次划分,先对着x划分,然后y,然后z,然后再xyz,如果更高维度就变成xyzw循环,每次对空间划分只划分两个区域。
KD树也是在我们做光线追踪前对包围盒的预处理。与此同时,中间节点A,B,C,D并不存储任何对象,而对象物体都存储在叶子节点中。中间节点存储划分的轴以及划分的位置,以及它的子节点
在预处理完包围盒之后,我们就可以对划分的区域进行求交了,
先对A求交,发现与A有交点,那么就要对A的子节点也进行求交,因为1没有继续划分,所以对1内的物体进行求交,再对B节点求交,然后沿着子节点依次这么做,最后对C节点的子节点3内的物体求交时成功找到了光线与物体的交点。
当然KD-Tree也有它的问题,例如,我们怎么判断一个立方体格子和一个三角形求交。其次一个物体可能会被存储在很多不同的格子里,这显然加大了复杂程度。
?

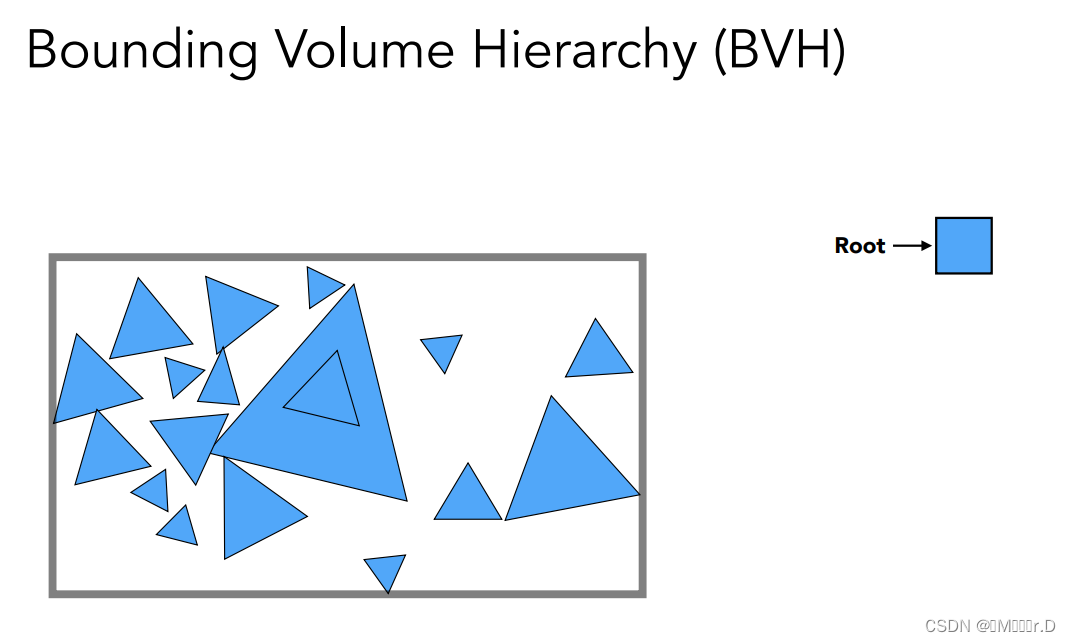
3.Object Partitions & Bounding Volume Hierarchy(BVH)—对象分区&边界体积层次
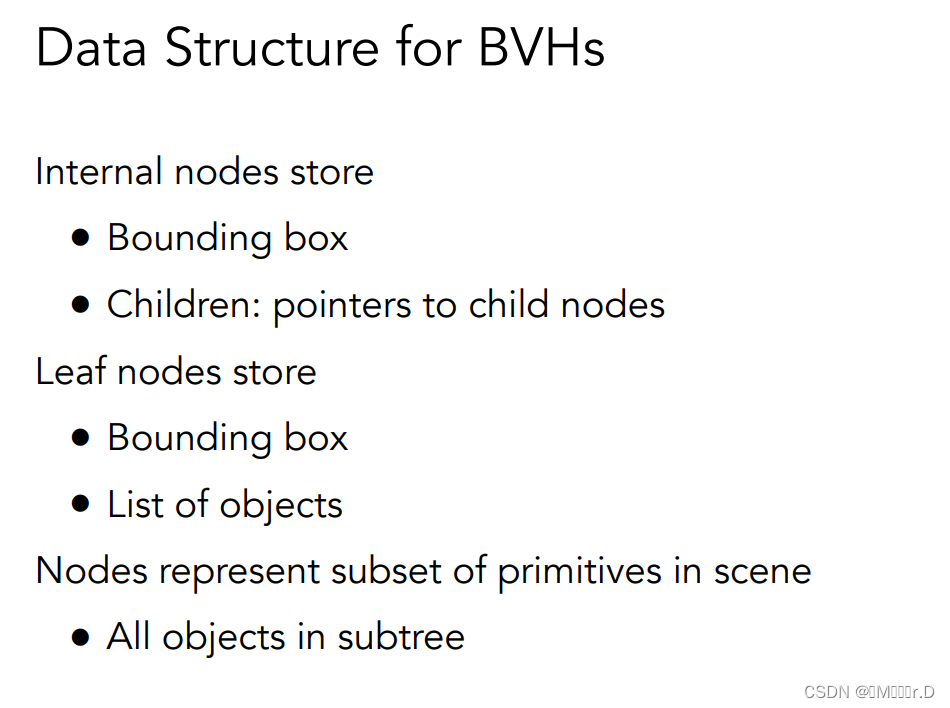
BVH是直接根据物体划分。首先为场景找到一个包围盒,将这堆三角形尽量均匀的分成两部分,然后重新为这两部分设置包围盒,然后重复前面两步的操作,直到最后每个包围的三角形趋近于一定的数量。用这种方法我们同样可以建立起一个树结构,同样中间节点只存包围盒与子节点的指针,只有叶子节点存储物体。而且有效避免了KD-Tree中一个三角形出现在多个节点中的问题。
当然BVH也有它的问题,如这些重新划分的包围盒之间会有重合,当然重合的影响并不是致命的,只要划分的重合度导致的误差过大不至于发生错误。所以怎么划分也是一个很重要的问题。

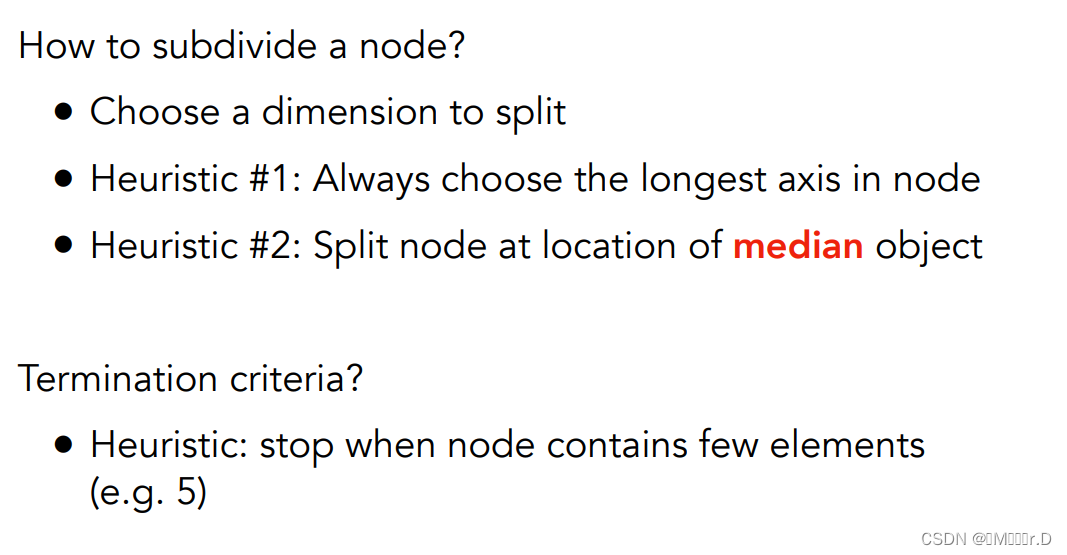
为了均匀划分,我们通常每次都沿着最长的轴划分,从而保证包围盒不过于“细长”或者“矮扁”。
如何把物体分成两半呢?人们通常取处在中间位置的物体来划分,这样可以保证两部分的物体数量差不多,也就可以使得构建的树结构的最大深度最小,也就是树两个叉的深度平衡。而这本质是一个取中位数的问题,在n个数中快速取得第i大的数实际上是一个快速选择算法,时间复杂度是O(n)。当每个节点的涵盖的三角形数量是五(假设)的话,就停止划分。
BVH的数据结构
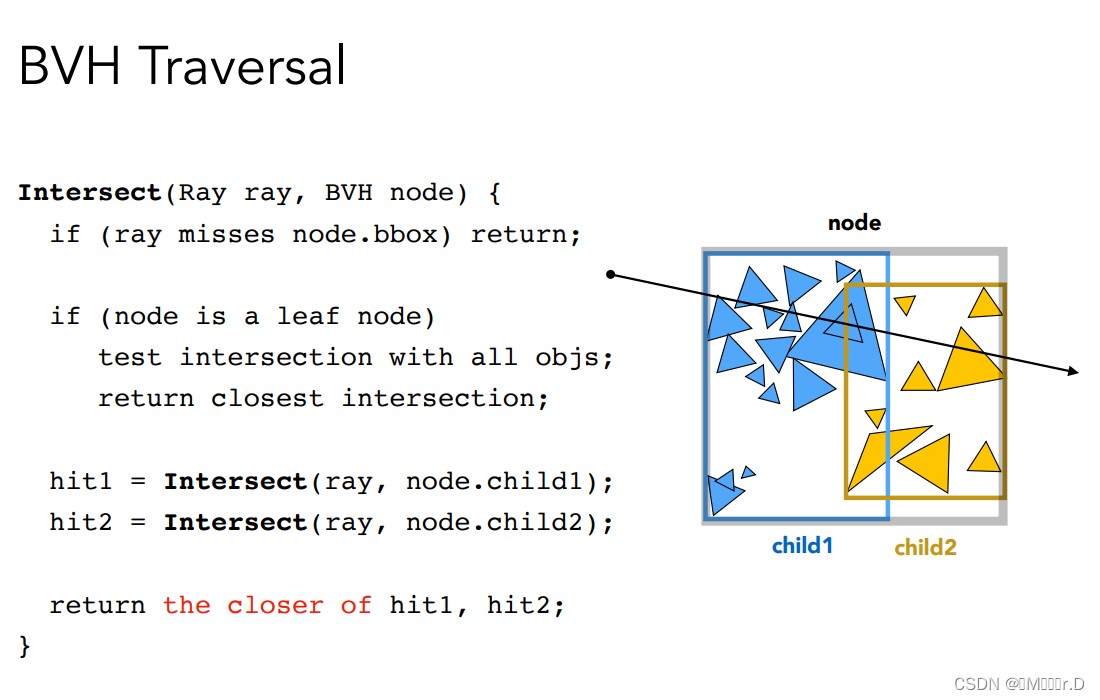
光线与BVH求交的伪代码,原理和KDtree差不多,如果与父节点有交点,则递归计算与其它两个子节点的求交,如果与子节点有交点则计算光线与叶子节点内物体的求交,
KDtree与BVH的比较
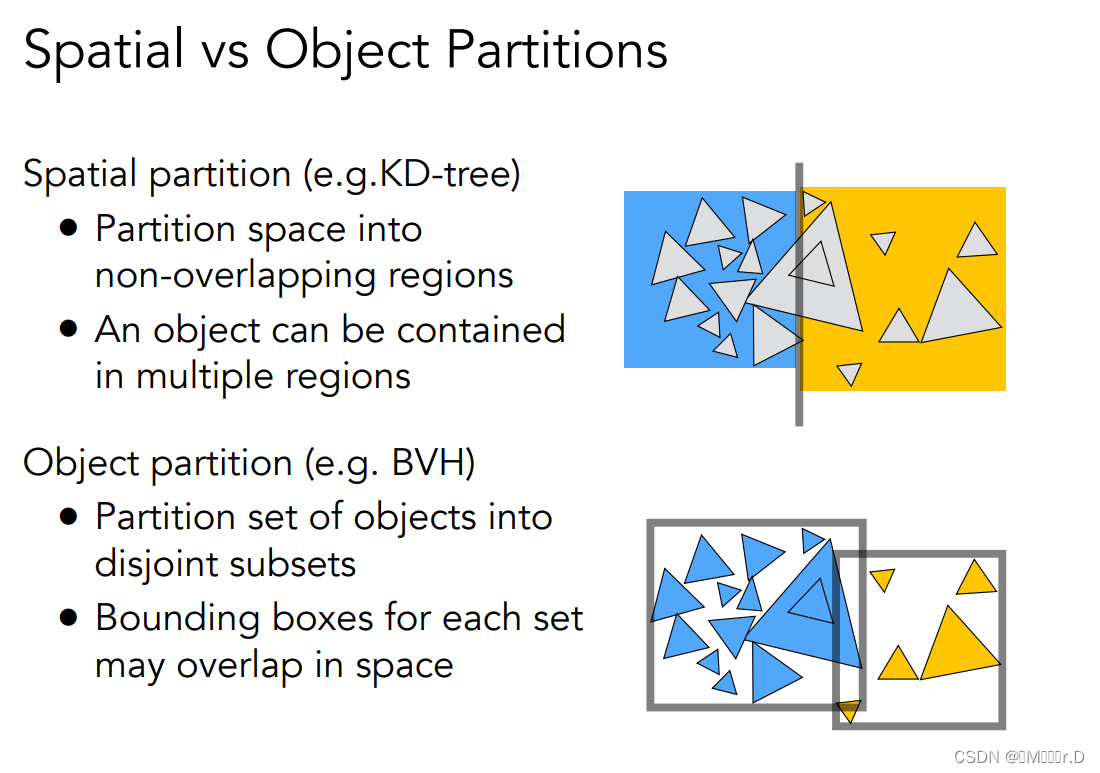
最后做一下比较,对于KD-Tree,它是对空间划分,并且一个物体可能被存储在不同的区域。而对于BVH,则是对对象进行划分,并且它们重新划分的区域可能会重叠。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!