STM32_HAL Freertos按键控制LED
2024-01-07 17:31:45
设置GPIO引脚
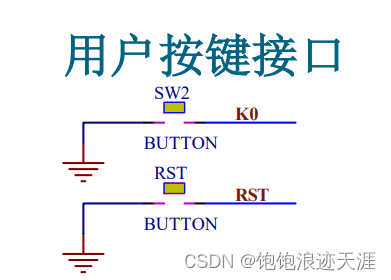
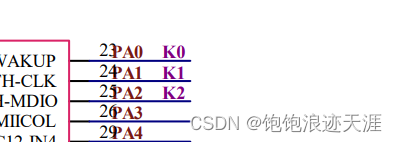
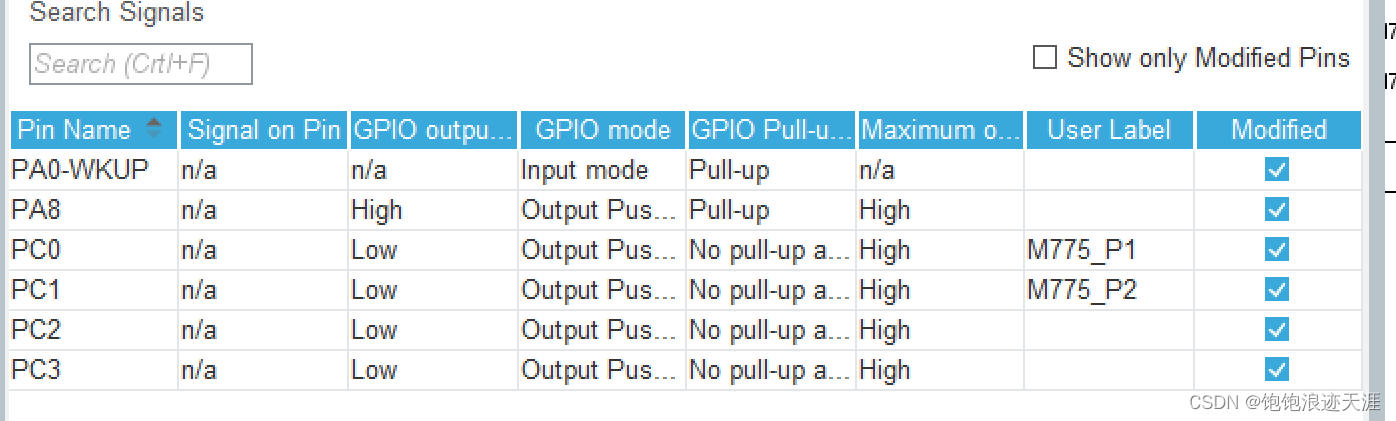
根据电路图,K0为用户按键,连接在PA0引脚,当K0按下时接地,引脚电平低电平。在CubeMX中设置PA0,将IO设置为输入,上拉(上拉外部悬空时,引脚为高电平)。
添加Freertos任务
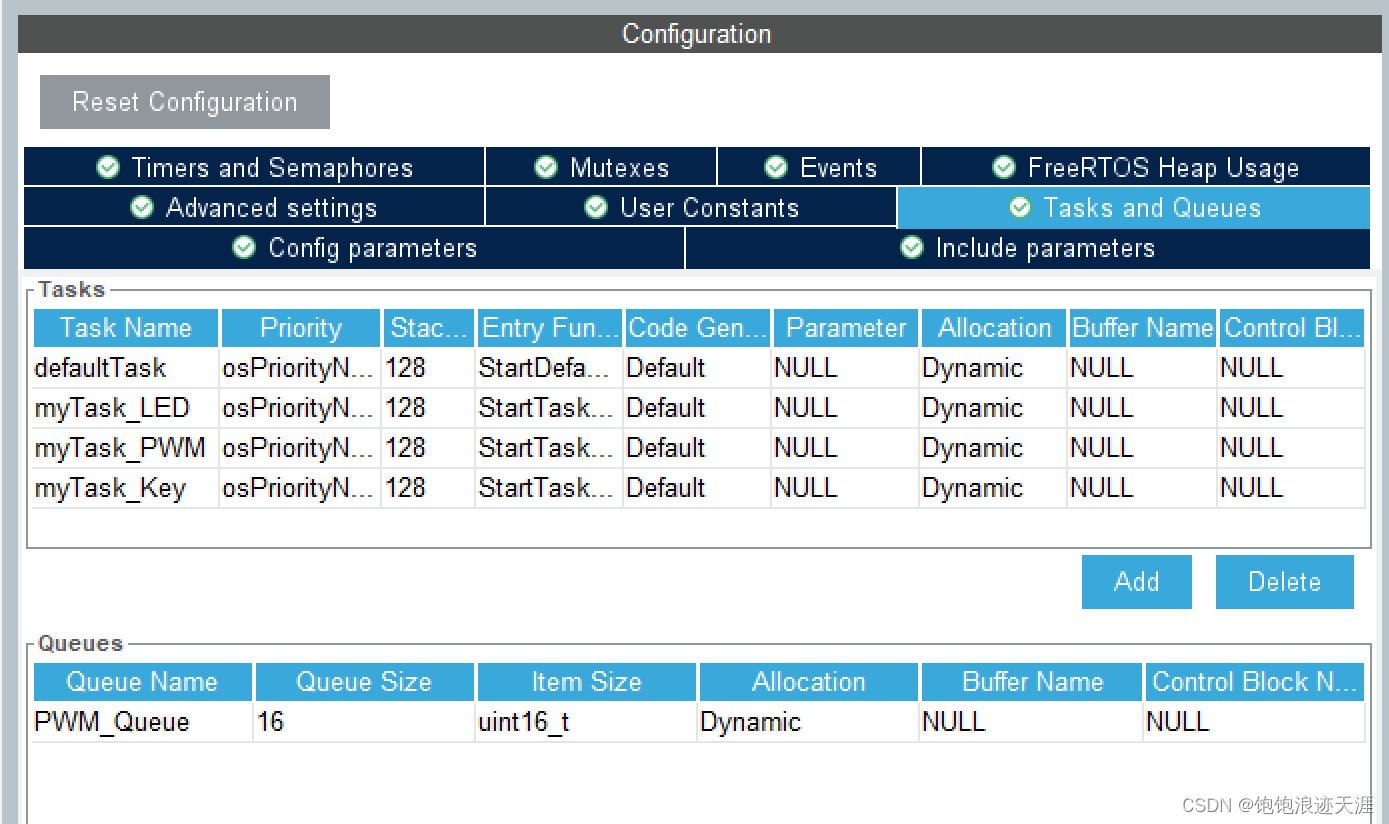
在freertos任务中,添加按键任务,通过myTask_Key不断读入PA0的引脚状态。添加一个消息队列用来给LED任务传递读取的内容。
完成任务代码
osMessageQId PWM_QueueHandle;
osMessageQDef(PWM_Queue, 16, uint16_t);
PWM_QueueHandle = osMessageCreate(osMessageQ(PWM_Queue), NULL);
void StartTask_Key(void const * argument)
{//按键读取状态并发送消息
/* USER CODE BEGIN StartTask_Key */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0){
osDelay(20);//消抖
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0){
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0){
}
osMessagePut(PWM_QueueHandle,0x01,1);
}
}
}
/* USER CODE END StartTask_Key */
}
/* USER CODE END Header_StartTask_LED */
void StartTask_LED(void const * argument)
{
/* USER CODE BEGIN StartTask_LED */
/* Infinite loop */
int LEDDelay = 100;
osEvent QueueEvent;
for(;;)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET);
osDelay(LEDDelay);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
osDelay(LEDDelay);
QueueEvent= osMessageGet(PWM_QueueHandle,1);
if((uint8_t)QueueEvent.value.v == 0x01)
{
LEDDelay+=100;
}
}
}
消息队列
Freertos中提供了消息队列用于传递消息。以下是消息队列常用函数
//1、创建消息队列
osMessageQId osMessageCreate (const osMessageQDef_t *queue_def, osThreadId thread_id);
//2、往消息队列里面写消息
osStatus osMessagePut (osMessageQId queue_id, uint32_t info, uint32_t millisec);
//3、从消息队列中获取消息,把消息拿走
osEvent osMessageGet (osMessageQId queue_id, uint32_t millisec);
//4、从消息队列中获取一个消息,但是不拿走,只是看一眼
osEvent osMessagePeek (osMessageQId queue_id, uint32_t millisec);
//5、获取消息队列中的消息数量
uint32_t osMessageWaiting(osMessageQId queue_id);
//6、获取消息队列还剩多少空间
uint32_t osMessageAvailableSpace(osMessageQId queue_id);
//7、删除消息队列
osStatus osMessageDelete (osMessageQId queue_id)
创建消息队列
/**
* @brief 创建并初始化一个消息队列
* @参数 queue_def 所定义的队列\ref osMessageQ.
* @参数 thread_id 线程ID(一般也用不上就用NULL)
* @返回值 返回消息队列的句柄,也就是消息队列的ID
*/
osMessageQId osMessageCreate (const osMessageQDef_t *queue_def, osThreadId thread_id)
{
(void) thread_id;
#if( configSUPPORT_STATIC_ALLOCATION == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
//如果同时支持动态创建和静态创建
if ((queue_def->buffer != NULL) && (queue_def->controlblock != NULL)) {
return xQueueCreateStatic(queue_def->queue_sz, queue_def->item_sz, queue_def->buffer, queue_def->controlblock);
}
else {
return xQueueCreate(queue_def->queue_sz, queue_def->item_sz);
}
#elif ( configSUPPORT_STATIC_ALLOCATION == 1 )
//如果只支持静态创建
return xQueueCreateStatic(queue_def->queue_sz, queue_def->item_sz, queue_def->buffer, queue_def->controlblock);
#else
//如果只支持动态创建
return xQueueCreate(queue_def->queue_sz, queue_def->item_sz);
#endif
}
消息队列的要素:
uxQueueLength:队列的长度,就是有多少个数据的意思
uxItemSize:每个数据单元的大小
下面创建一个队列深度为16,每个消息单元为uint8_t的消息队列
//定义消息队列的ID
osMessageQId myQueue01Handle;
//定义消息队列的名称,大小,类型
osMessageQDef(myQueue01, 16, uint8_t);
//创建消息队列
myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);
往消息队列中写消息
**
* @简介 往消息队列中写消息
* @参数 queue_id 消息队列的ID.
* @参数 info 消息内容,发送的消息需要强制转化为uint32_t类型
* @参数 millisec 超时时间.
* @返回值 状态信息,是否写入成功
*/
osStatus osMessagePut (osMessageQId queue_id, uint32_t info, uint32_t millisec)
{
portBASE_TYPE taskWoken = pdFALSE;
TickType_t ticks;
ticks = millisec / portTICK_PERIOD_MS; //超时时间转换为tick单位
if (ticks == 0) {
ticks = 1;
}
//Cortex-M3支持两种操作模式handler模式和thread模式,
if (inHandlerMode()) { //handler模式就用中断的方式发送消息
if (xQueueSendFromISR(queue_id, &info, &taskWoken) != pdTRUE) {
return osErrorOS;
}
portEND_SWITCHING_ISR(taskWoken);
}
else { //thread模式
if (xQueueSend(queue_id, &info, ticks) != pdTRUE) {
return osErrorOS;
}
}
return osOK;
}
往消息队列中写个0x08进去,超时时间1ms;
osMessagePut(myQueue01Handle,0x08,1);
从消息队列中获取消息
/**
* @brief 从消息队列中获取一个消息,没消息就等消息
* @param queue_id 消息队列的ID
* @param millisec 超时时间
* @retval event 返回event
*/
osEvent osMessageGet (osMessageQId queue_id, uint32_t millisec)
{
portBASE_TYPE taskWoken;
TickType_t ticks;
osEvent event;
event.def.message_id = queue_id;
event.value.v = 0;
if (queue_id == NULL) { //找不到消息队列,那就报错
event.status = osErrorParameter;
return event;
}
taskWoken = pdFALSE;
ticks = 0;
if (millisec == osWaitForever) { //超时时间设置为portMAX_DELAY
ticks = portMAX_DELAY;
}
else if (millisec != 0) {
ticks = millisec / portTICK_PERIOD_MS; //超时时间转化为TICK单位
if (ticks == 0) {
ticks = 1;
}
}
if (inHandlerMode()) { //中断里面获得消息
if (xQueueReceiveFromISR(queue_id, &event.value.v, &taskWoken) == pdTRUE) {
/* We have mail */
event.status = osEventMessage;
}
else {
event.status = osOK;
}
portEND_SWITCHING_ISR(taskWoken);
}
else {//线程模式获得消息,把消息存到&event.value.v中
if (xQueueReceive(queue_id, &event.value.v, ticks) == pdTRUE) {
/* We have mail */
event.status = osEventMessage;
}
else {
event.status = (ticks == 0) ? osOK : osEventTimeout;
}
}
return event;
}
event结构体
typedef struct {
osStatus status; ///< status code: event or error information
union {
uint32_t v; ///< message as 32-bit value
void *p; ///< message or mail as void pointer
int32_t signals; ///< signal flags
} value; ///< event value
union {
osMailQId mail_id; ///< mail id obtained by \ref osMailCreate
osMessageQId message_id; ///< message id obtained by \ref osMessageCreate
} def; ///< event definition
} osEvent;
event结构体主要包含3个内容:
status:这个成员用于存储事件或错误的状态码。可能包含有关事件状态或错误信息的信息。
value:这是一个联合体(union),它提供了不同类型的事件值的存储方式:
v:作为一个32位无符号整数存储事件的数值信息。
p:作为一个指向 void 类型的指针,用于存储事件或邮件的数据。
signals:这个成员用于存储信号标志,可能是一些特定的信号标志或标志组。
def:也是一个联合体,用于存储事件的定义信息。
mail_id:如果是邮件相关的事件,则存储邮件的ID,这个ID可能是通过 osMailCreate 创建的。
message_id:如果是消息相关的事件,则存储消息的ID,这个ID可能是通过 osMessageCreate 创建的。
消息队列发送与接收实验(传递一个数据)
知道了消息队列的发送和接收函数就可以做一些简单的实验。建两个任务,如果的创建这里不解释,请参考任务创建章节。一个任务往队列中写消息,一个任务从队列中读消息。
//Task02用来往队列中写消息
//按键按下再松开就往队列中发送数据0x08
void StartTask02(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(KEY_1_GPIO_Port,KEY_1_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(20);
while(HAL_GPIO_ReadPin(KEY_1_GPIO_Port,KEY_1_Pin) == GPIO_PIN_RESET);
osMessagePut(myQueue01Handle,0x08,1);
}
osDelay(1);
}
}
//Task03用来从队列中读消息
//消息内容如果是8的话就发送一些内容出去
//读队列任务也不添加阻塞
void StartTask03(void const * argument)
{
osEvent QueueEvent;
uint8_t Tx_Buffer[] = "FreeRTOS queue test\r\n";
for(;;)
{
QueueEvent = osMessageGet (myQueue01Handle, osWaitForever);
if((uint8_t)QueueEvent.value.v == 8)
{
HAL_UART_Transmit(&huart1,Tx_Buffer,sizeof(Tx_Buffer),10);
}
osDelay(1);
}
}
文章来源:https://blog.csdn.net/lufei12345678/article/details/135423524
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!