伺服电机:伺服电机的控制方式(脉冲控制)
脉冲控制是伺服系统最常见的一种控制方式,基本上每家的伺服驱动器都支持脉冲模式。脉冲模式一般用于轴比较少的场合(4轴及以下),轴数比较多的话就需要用总线来控制,毕竟伺服控制器的脉冲输入输出口的数量是有限的。
一、脉冲模式的原理
运动控制器输出脉冲信号给伺服驱动器,类似于控制步进电机;
伺服驱动器工作于位置模式;
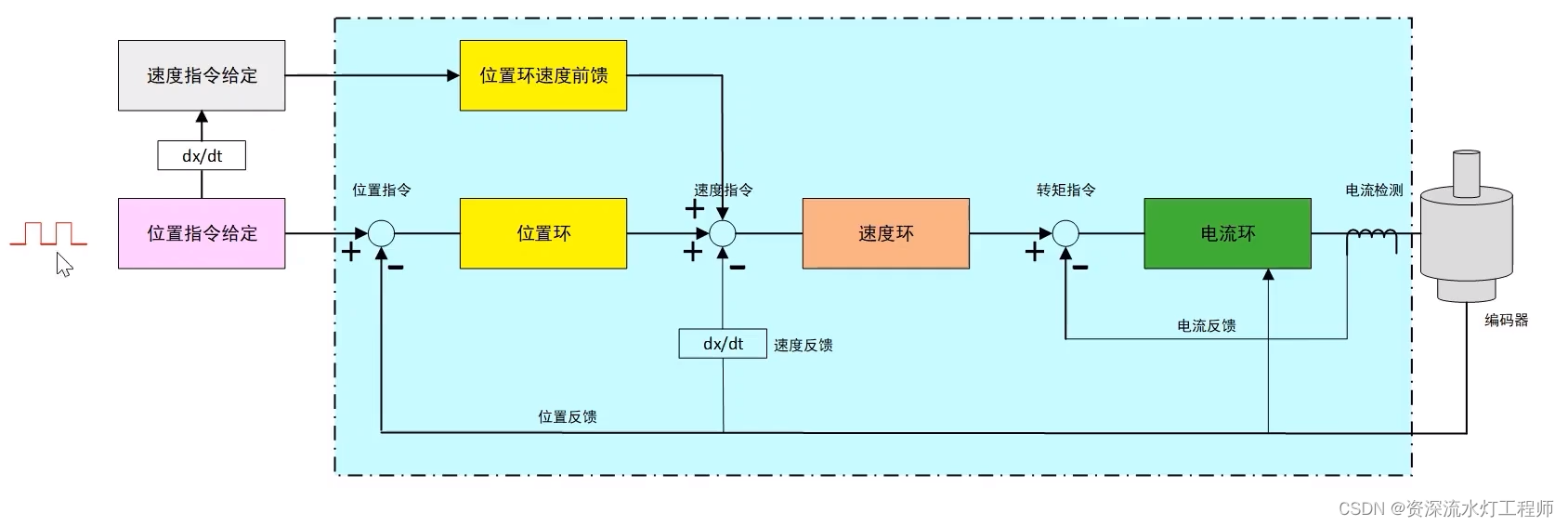
伺服驱动器内部要完成三个闭环:位置环、速度环、电流环;
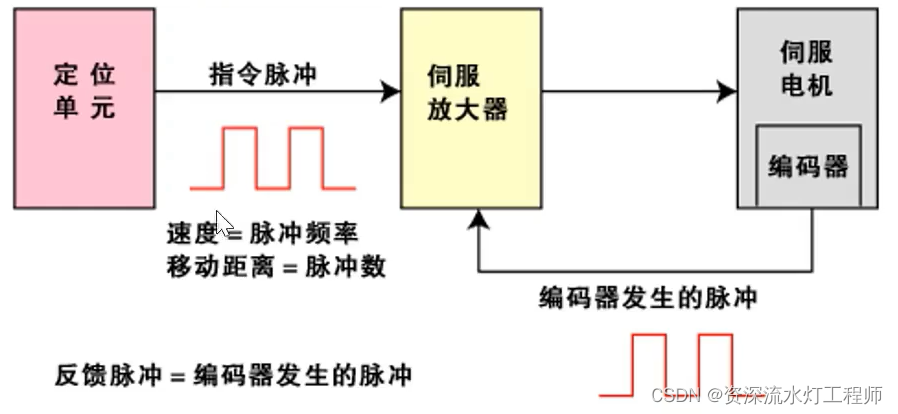
脉冲模式的原理如上图所示,通过脉冲个数来控制伺服系统走的距离,通过脉冲频率控制伺服系统的速度。
电子齿轮比
脉冲控制模式中一个重要的概念就是电子齿轮比,电子齿轮比是这么定义的:
????????????????????????电子齿轮比 = 电子齿轮分子 / 电子齿轮分母
????????????????????????齿轮后脉冲数量 = 齿轮前脉冲数量 * 电子齿轮比
????????????????????????齿轮后脉冲频率?= 齿轮前脉冲频率?* 电子齿轮比
比如用PLC发送脉冲给伺服驱动器,PLC发出的脉冲乘以电子齿轮比之后才是伺服运转时真正的脉冲数量。
二、高速脉冲种类
高速脉冲主要有三种:脉冲+方向,CW/CCW,AB相脉冲
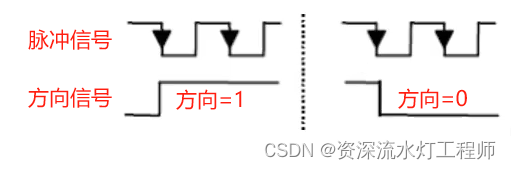
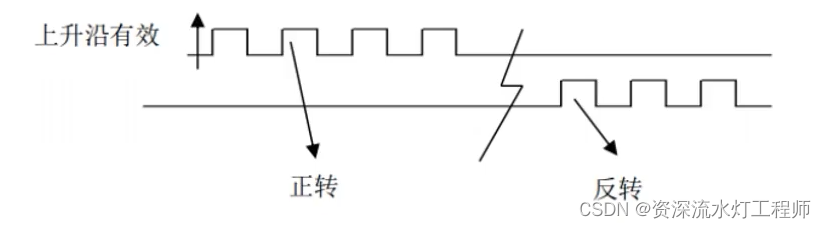
脉冲+方向
由脉冲和方向两个信号组成,当方向是1的时候,伺服电机绕一个方向运动;当方向是0 的时候,伺服电机绕另一个方向运动。
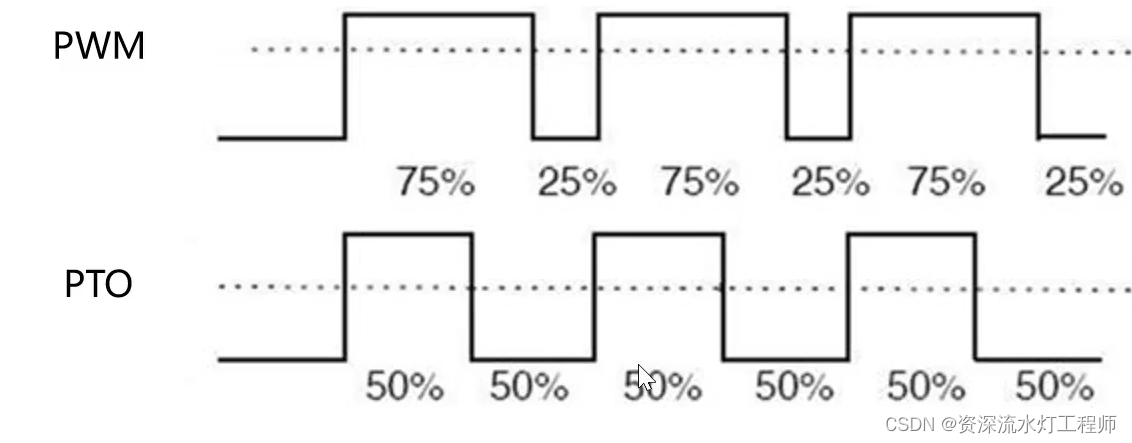
常见的脉冲产生设备是PLC,PLC可以输出两种类型的脉冲,一种是PWM脉冲,占空比和周期都可以调节,另一种是PTO脉冲,占空比固定位50%,周期可调;?
脉冲+方向的模式一般用于脉冲频率不超过200khz的情况,也不适合长距离发送脉冲,抗干扰能力比较差,一般在小型的PLC中使用这种方式。
在使用脉冲+ 方向的模式时,要先给方向信号,再给脉冲信号,不然电机启动时可能会先反方向运动一小段后才朝正确的方向运动。
?
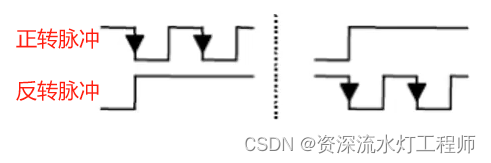
CW/CCW(也称双脉冲)?
双脉冲有两路脉冲,一路脉冲控制伺服电机正转,一路脉冲控制伺服电机反转
?
双脉冲模式一般用在输出脉冲频率超过200kHz,以及长距离发送脉冲的情况。双脉冲模式抗干扰能力强,信号传输 的准确性较高,一般在大型模块化PLC中的位置控制。
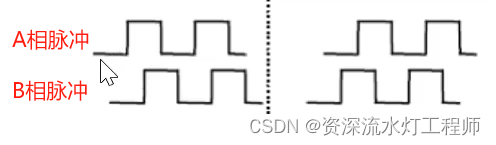
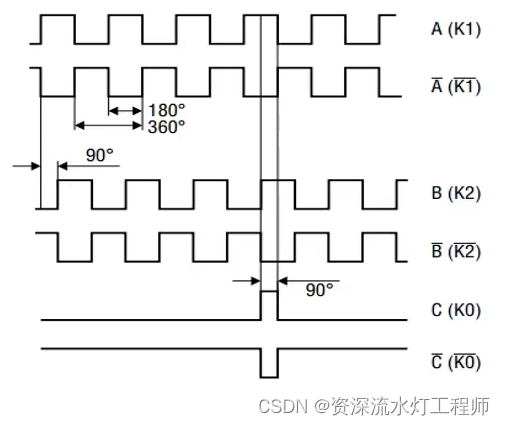
AB相脉冲
当A相脉冲超前于B相脉冲的时候,伺服电机正转;A相脉冲滞后于B相脉冲的时候,伺服电机反转,A相与B相信号超前与之后一般都是90°。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!