ros2 基础学习10 ros 中服务的定义及示例
话题通信可以实现多个ROS节点之间数据的单向传输,使用这种异步通信机制,发布者无法准确知道订阅者是否收到消息,本讲我们将一起学习ROS另外一种常用的通信方法——服务,可以实现类似你问我答的同步通信效果。
类似于http 请求,c/s 模式
通信模型
在之前的课程中,我们通过一个节点驱动相机,发布图像话题,另外一个节点订阅图像话题,并实现对其中红色物体的识别,此时我们可以按照图像识别的频率,周期得到物体的位置。
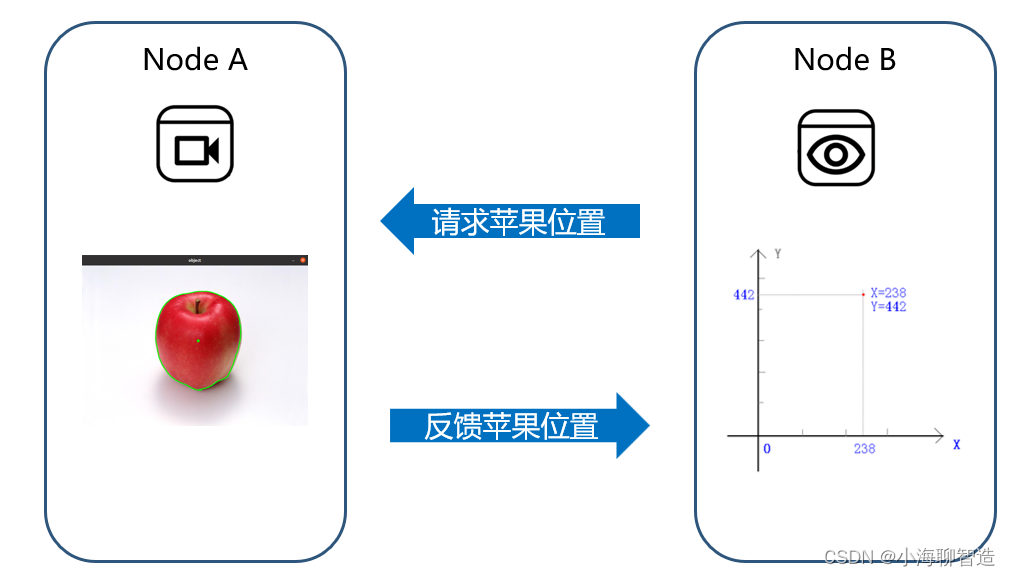
这个位置信息可以继续发给机器人的上层应用使用,比如可以跟随目标运动,或者运动到目标位置附近。此时,我们并不需要这么高的频率一直订阅物体的位置,而是更希望在需要这个数据的时候,发一个查询的请求,然后尽快得到此时目标的最新位置。
这样的通信模型和话题单向传输有所不同,变成了发送一个请求,反馈一个应答的形式,好像是你问我答一样,这种通信机制在ROS中成为服务,Service。
客户端/服务器模型
从服务的实现机制上来看,这种你问我答的形式叫做客户端/服务器模型,简称为CS模型,客户端在需要某些数据的时候,针对某个具体的服务,发送请求信息,服务器端收到请求之后,就会进行处理并反馈应答信息。

这种通信机制在生活中也很常见,比如我们经常浏览的各种网页,此时你的电脑浏览器就是客户端,通过域名或者各种操作,向网站服务器发送请求,服务器收到之后返回需要展现的页面数据。
同步通信
这个过程一般要求越快越好,假设服务器半天没有反应,你的浏览器一直转圈圈,那有可能是服务器宕机了,或者是网络不好,所以相比话题通信,在服务通信中,客户端可以通过接收到的应答信息,判断服务器端的状态,我们也称之为同步通信。
一对多通信

服务接口
和话题通信类似,服务通信的核心还是要传递数据,数据变成了两个部分,一个请求的数据,比如请求苹果位置的命令,还有一个反馈的数据,比如反馈苹果坐标位置的数据,这些数据和话题消息一样,在ROS中也是要标准定义的,话题使用.msg文件定义,服务使用的是.srv文件定义,后续我们会给大家介绍定义的方法。
示例:
大家现在对ROS服务通信应该有了基本了解,接下来我们就要开始编写代码啦。还是从一个相对简单的例程开始,也是ROS官方的一个例程,通过服务实现一个加法求解器的功能。

当我们需要计算两个加数的求和结果时,就通过客户端节点,将两个加数封装成请求数据,针对服务“add_two_ints”发送出去,提供这个服务的服务器端节点,收到请求数据后,开始进行加法计算,并将求和结果封装成应答数据,反馈给客户端,之后客户端就可以得到想要的结果啦。
流程步骤
- 创建功能包
- 自定义的服务接口,参考上一节
ros 中的通信接口的定义以及如何创建自定义msg、srv和action文件 - 编写代码
- 修改setup.py 文件
- 编译,配置环境变量
- 运行测试
ros2 pkg create --build-type ament_python learning_server
创建功能包成功
创建客户端代码,service_adder_client.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import sys
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from learning_interface.srv import AddTwoInts # 自定义的服务接口
class adderClient(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.client = self.create_client(AddTwoInts, 'add_two_ints') # 创建服务客户端对象(服务接口类型,服务名)
while not self.client.wait_for_service(timeout_sec=1.0): # 循环等待服务器端成功启动
self.get_logger().info('service not available, waiting again...')
self.request = AddTwoInts.Request() # 创建服务请求的数据对象
def send_request(self): # 创建一个发送服务请求的函数
self.request.a = int(sys.argv[1])
self.request.b = int(sys.argv[2])
self.future = self.client.call_async(self.request) # 异步方式发送服务请求
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = adderClient("service_adder_client") # 创建ROS2节点对象并进行初始化
node.send_request() # 发送服务请求
while rclpy.ok(): # ROS2系统正常运行
rclpy.spin_once(node) # 循环执行一次节点
if node.future.done(): # 数据是否处理完成
try:
response = node.future.result() # 接收服务器端的反馈数据
except Exception as e:
node.get_logger().info(
'Service call failed %r' % (e,))
else:
node.get_logger().info( # 将收到的反馈信息打印输出
'Result of add_two_ints: for %d + %d = %d' %
(node.request.a, node.request.b, response.sum))
break
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
创建服务端代码 service_adder_server.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from learning_interface.srv import AddTwoInts # 自定义的服务接口
class adderServer(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.srv = self.create_service(AddTwoInts, 'add_two_ints', self.adder_callback) # 创建服务器对象(接口类型、服务名、服务器回调函数)
def adder_callback(self, request, response): # 创建回调函数,执行收到请求后对数据的处理
response.sum = request.a + request.b # 完成加法求和计算,将结果放到反馈的数据中
self.get_logger().info('Incoming request\na: %d b: %d' % (request.a, request.b)) # 输出日志信息,提示已经完成加法求和计算
return response # 反馈应答信息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = adderServer("service_adder_server") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
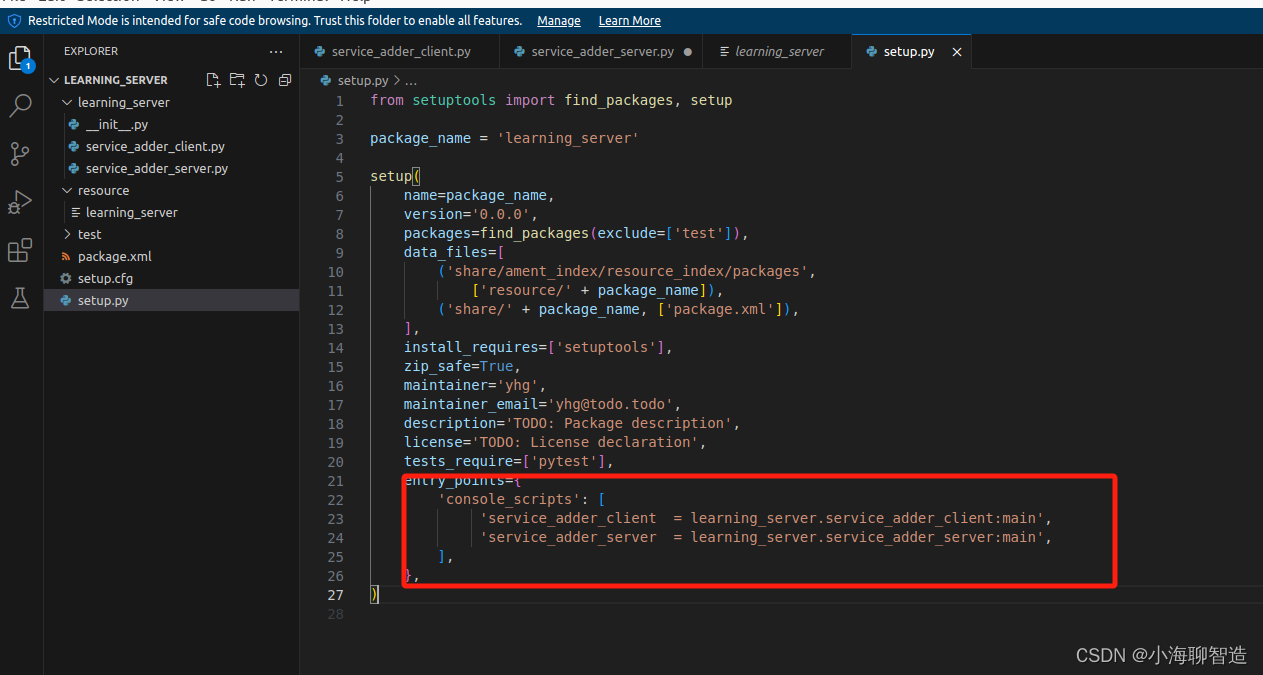
修改setup.py 文件
'service_adder_client = learning_server.service_adder_client:main',
'service_adder_server = learning_server.service_adder_server:main',
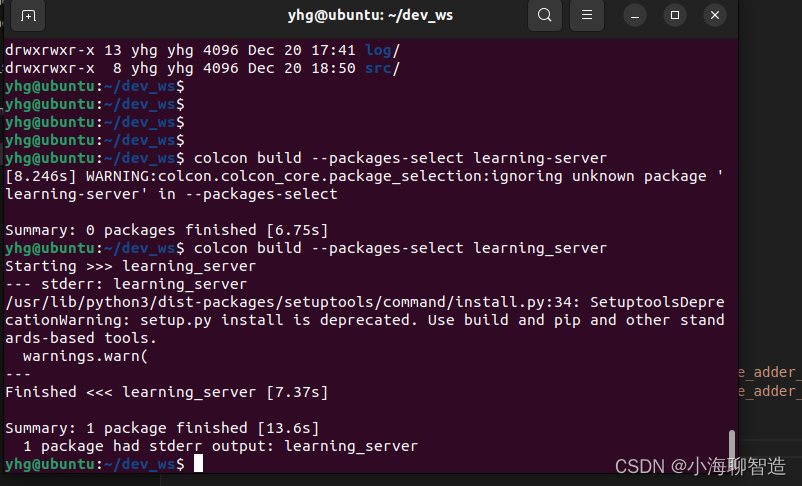
编译
colcon build --packages-select learning_server
设置环境变量
source install/local_setup.bash

运行测试
启动服务端
ros2 run learning_server service_adder_server

启动后命令框没反应就是启动成功,另外再开一个启动客户端,并传2个参数
ros2 run learning_server service_adder_client 1 2
运行结果如下:
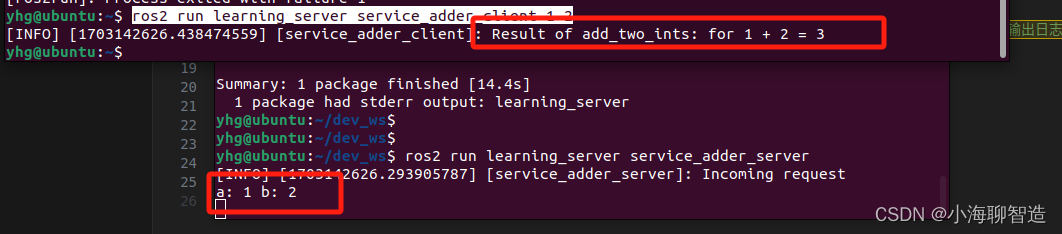
客户端发参数给服务端,服务端参数打印,并将结果回给客户端
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!