ros2使用colcon构建软件包概述
Using?colcon?to build packages
Goal:?Build a ROS 2 workspace with?colcon.
Tutorial level:?Beginner
Time:?20 minutes
This is a brief tutorial on how to create and build a ROS 2 workspace with?colcon. It is a practical tutorial and not designed to replace the core documentation.
Background?
colcon?is an iteration on the ROS build????????tools?catkin_make,?catkin_make_isolated,?catkin_tools?and?ament_tools. For more information on the design of colcon see?this document.
The source code can be found in the?colcon GitHub organization.
Prerequisites?
Install colcon?
LinuxmacOSWindows
sudo apt install python3-colcon-common-extensions
Install ROS 2?
To build the samples, you will need to install ROS 2.
Follow the?installation instructions.
Attention
If installing from Debian packages, this tutorial requires the?desktop installation.
Basics?
A ROS workspace is a directory with a particular structure. Commonly there is a?src?subdirectory. Inside that subdirectory is where the source code of ROS packages will be located. Typically the directory starts otherwise empty.
colcon does out of source builds. By default it will create the following directories as peers of the?src?directory:
-
The?
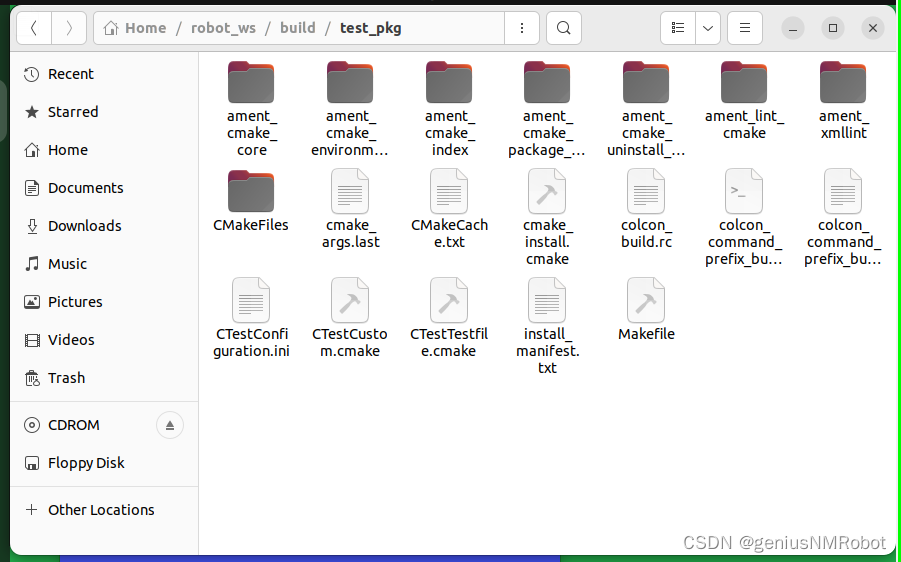
build?directory will be where intermediate files are stored. For each package a subfolder will be created in which e.g. CMake is being invoked.(在build文件夹内存放中间文件,每个包都会建立一个专门的文件夹) -
-
-
可以看到大部分都是与cmake有关的文件
-
The?
install?directory is where each package will be installed to. By default each package will be installed into a separate subdirectory.(install文件夹就是软件包的安装目录,如果要在bash内能够直接输入名字直接运行此包,那么肯定要把这个install/setup.bash加入到bash的启动文件里面去,就是sudo echo 'source 工作空间目录/install/setup.bash' >>~/.bashrc我也不清楚这句话对不对) -
The?
log?directory contains various logging information about each colcon invocation.
Note
Compared to catkin there is no?devel?directory.(使用colcon没有devel文件夹,使用catkin有devel文件夹)
Create a workspace?
First, create a directory (ros2_ws) to contain our workspace:
LinuxmacOSWindows
mkdir -p ~/ros2_ws/src cd ~/ros2_ws

At this point the workspace contains a single empty directory?src:
. └── src 1 directory, 0 files
Add some sources?
Let’s clone the?examples?repository into the?src?directory of the workspace:
git clone https://github.com/ros2/examples src/examples -b humbler
如果git不行,就用浏览器访问,然后下载这个包好了,如果浏览器访问不了就修改hosts文件,运气好的话就可以下载了,估计40%的概率可以下载
Now the workspace should have the source code to the ROS 2 examples:
.
└── src
└── examples
├── CONTRIBUTING.md
├── LICENSE
├── rclcpp
├── rclpy
└── README.md
4 directories, 3 files

Source an underlay?
It is important that we have sourced the environment for an existing ROS 2 installation that will provide our workspace with the necessary build dependencies for the example packages. This is achieved by sourcing the setup script provided by a binary installation or a source installation, ie. another colcon workspace (see?Installation). We call this environment an?underlay.
(underlay好像就是被调用的工作空间,overlay就是被执行的包的工作空间)
Our workspace,?ros2_ws, will be an?overlay?on top of the existing ROS 2 installation. In general, it is recommended to use an overlay when you plan to iterate on a small number of packages, rather than putting all of your packages into the same workspace.
虽然我们可以把ros2的安装目录作为工作空间,(就是/opt/ros/humble目录),但是一般不这么做,一般都是另外建立一个目录作为工作空间例如~/ros2_ws目录,如果是这样overlay可能就是~/ros2_ws,? ? ? ? underlay就是指/opt/ros/humble,需要注意的是不是只有ros2的安装目录才能叫做underlay,应该凡是被调用的工作空间都可以叫做underlay----我猜的
Build the workspace?
Attention
To build packages on Windows you need to be in a Visual Studio environment, see?Building the ROS 2 Code?for more details.
In the root of the workspace, run?colcon?build. Since build types such as?ament_cmake?do not support the concept of the?devel?space and require the package to be installed, colcon supports the option?--symlink-install. This allows the installed files to be changed by changing the files in the?source?space (e.g. Python files or other non-compiled resources) for faster iteration.
LinuxmacOSWindows
colcon build --symlink-install
After the build is finished, we should see the?build,?install, and?log?directories:
. ├── build ├── install ├── log └── src 4 directories, 0 files
Run tests?
To run tests for the packages we just built, run the following:
LinuxmacOSWindows
colcon test
Source the environment?
When colcon has completed building successfully, the output will be in the?install?directory. Before you can use any of the installed executables or libraries, you will need to add them to your path and library paths. colcon will have generated bash/bat files in the?install?directory to help set up the environment.(colcon创建的setup.bash文件就是帮助我们添加这些文件到系统路径的,所以才要source) These files will add all of the required elements to your path and library paths as well as provide any bash or shell commands exported by packages.
LinuxmacOSWindows
source install/setup.bash

Try a demo?
With the environment sourced, we can run executables built by colcon. Let’s run a subscriber node from the examples:
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function

In another terminal, let’s run a publisher node (don’t forget to source the setup script):
ros2 run examples_rclcpp_minimal_publisher publisher_member_function
You should see messages from the publisher and subscriber with numbers incrementing.
Create your own package?
colcon uses the?package.xml?specification defined in?REP 149?(format 2?is also supported).
colcon supports multiple build types. The recommended build types are?ament_cmake?and?ament_python. Also supported are pure?cmake?packages.
An example of an?ament_python?build is the?ament_index_python package?, where the setup.py is the primary entry point for building.
A package such as?demo_nodes_cpp?uses the?ament_cmake?build type, and uses CMake as the build tool.(我们用c++写代码编译的时候实际使用的是cmake作为工具)
For convenience, you can use the tool?ros2?pkg?create?to create a new package based on a template.
Note
For?catkin?users, this is the equivalent of?catkin_create_package.
上边那句===catkin_create_package
Setup?colcon_cd?
The command?colcon_cd?allows you to quickly change the current working directory of your shell to the directory of a package. As an example?colcon_cd?some_ros_package?would quickly bring you to the directory?~/ros2_ws/src/some_ros_package.
LinuxmacOSWindows
echo "source /usr/share/colcon_cd/function/colcon_cd.sh" >> ~/.bashrc echo "export _colcon_cd_root=/opt/ros/humble/" >> ~/.bashrc

Depending on the way you installed?colcon_cd?and where your workspace is, the instructions above may vary, please refer to?the documentation?for more details. To undo this in Linux and macOS, locate your system’s shell startup script and remove the appended source and export commands.
Setup?colcon?tab completion?
The command?colcon?supports command completion?for bash and bash-like shells if the?colcon-argcomplete?package is installed.
LinuxmacOSWindows
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc

Depending on the way you installed?colcon?and where your workspace is, the instructions above may vary, please refer to?the documentation?for more details. To undo this in Linux and macOS, locate your system’s shell startup script and remove the appended source command.
Tips?
-
If you do not want to build a specific package place an empty file named?
COLCON_IGNORE?in the directory and it will not be indexed. -
If you want to avoid configuring and building tests in CMake packages you can pass:?
--cmake-args?-DBUILD_TESTING=0. -
If you want to run a single particular test from a package:
colcon test --packages-select YOUR_PKG_NAME --ctest-args -R YOUR_TEST_IN_PKG
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!