【ARM Cortex-M 系列 5 -- RT-Thread renesas/ra4m2-eco 移植编译篇】
RT-Thread 移植编译篇
本文以瑞萨的ra4m2-eco 为例介绍如何下载rt-thread 及编译的设置。
RT-Thread 代码下载:
git clone 路径:https://github.com/RT-Thread/rt-thread
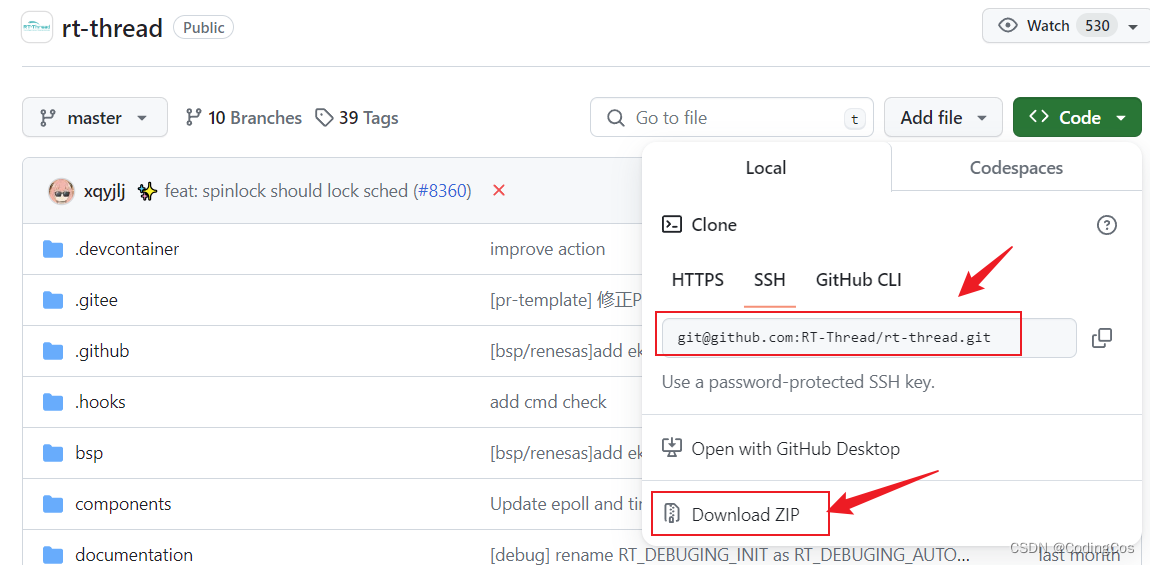
代码下载下来后如下:
[03:04:21] (*^~^*) ~/sam/workbase/rtthread/rt-thread$ ls
AUTHORS ChangeLog.md examples Jenkinsfile libcpu README_de.md README.md src tools
bsp components documentation include Kconfig LICENSE README_es.md README_zh.md
此外还需自行下载一套编译 arm gcc 编译工具,如gcc-arm-none-eabi。
编译
进入rt-thread/bsp/renesas/ra4m2-eco 目录执行scons 命令进行编译,通常会报出 RTT_ROOT 没有定义,这个是系统环境变量,我们可以通过 os.environ 进行设置。我看我上提到了使用python中的 setenv 的函数。这时可能是你遇到 AttributeError: module 'os' has no attribute 'setenv' 错误。 我这边最后使用的是 os.environ 进行设置。
os.environ 使用示例
os.environ 是一个包含所有环境变量的字典。你可以直接使用它来设置环境变量,就像操作普通字典一样:
import os
os.environ['MY_VARIABLE'] = 'my_value'
这种方法设置的环境变量只在当前进程中有效,如果 Python 脚本启动了新的子进程,这些变量也会传递给子进程。
os.putenv使用示例
os.putenv() 是一个函数,可以用来设置环境变量。但它的行为会因操作系统和 Python 解释器的不同而有所差异。在某些系统上,使用 os.putenv() 设定的环境变量可能不会立即反映在 os.environ 中,或者根本不起作用:
import os
os.putenv('MY_VARIABLE', 'my_value')
由于这些潜在的不一致性和限制,推荐使用 os.environ 方法来设置环境变量。 我这边使用os.putenv 还是没有解决问题,如下:
import os
#os.putenv('RTT_ROOT', '../../..')
os.environ['RTT_ROOT'] = '../../..'
print(os.getenv('RTT_ROOT'))
rt-thread/bsp/renesas/ra4m2-eco$ py set_evn.py
None
最后还是使用os.environ['MY_VARIABLE'] = 'my_value' 这种方式有效。
os.environ['RTT_ROOT'] = '../../..'
if os.getenv('RTT_CC'):
CROSS_TOOL = os.getenv('RTT_CC')
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
至于 RTT_ROOT 具体要设置成什么样的值,需要根据rt-thread/bsp/renesas/ra4m2-eco/Kconfig 进行配置:
mainmenu "RT-Thread Configuration"
config BSP_DIR
string
option env="BSP_ROOT"
default "."
config RTT_DIR
string
option env="RTT_ROOT"
default "../../.."
python from 后指定路径
在 Python 中,使用 from 关键字可以导入特定的模块、函数、变量等。当你使用 from ... import ... 这样的语法时,通常会从Python的标准库、已安装的包或者模块搜索路径中的模块导入。如果你需要从特定的文件路径导入模块,需要确保该路径在 Python 搜索模块的路径列表中。
假设你有一个位于 /path/to/module 目录下的模块 mymodule.py,你想要从这个模块中导入名为 myfunction 的函数。下面是如何处理这种情况的步骤:
- 将模块所在的目录添加到
sys.path:
import sys
sys.path.insert(0, '/path/to/module')
使用 sys.path.insert(0, '/path/to/module') 将模块所在目录添加到搜索路径的开始,确保它在搜索时会首先被考虑。
- 现在你可以使用通常的
from ... import ...语法来导入你的函数了:
from mymodule import myfunction
这样,myfunction 将从 /path/to/module/mymodule.py 文件中导入。
请注意,这样做可能会导致模块路径冲突,尤其是当你添加的路径包含有与标准库或第三方库重名的模块时。在实际项目中,通常建议使用相对路径(对于包内的模块)或设置合适的项目结构,而不是直接修改 sys.path。
如果你正在使用包结构,也可以使用相对导入:
# 假设当前文件在 /path/to/module/submodule/ 下
from .. import mymodule
这里,.. 表示上一级目录,因此 mymodule 会从 /path/to/module/ 导入。 在进行模块导入时,请确保遵守 Python 的包和模块命名规范,以及考虑到模块查找路径的顺序,这样可以避免潜在的导入错误和冲突。
在进行rt-thread 编译的时候,在from building import * 处一直报错:
sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]
print(sys.path)
try:
from building import *
except:
print('Cannot found RT-Thread root directory, please check RTT_ROOT')
print(RTT_ROOT)
exit(-1)
后面将其修改为:
sys.path.insert(0, os.path.join(RTT_ROOT, 'tools'))
#sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]
print(sys.path)
try:
from building import *
except:
print('Cannot found RT-Thread root directory, please check RTT_ROOT')
print(RTT_ROOT)
exit(-1)
编译问题
在编译时一直报下面问题:
/usr/include/newlib/time.h:56:1: error: unknown type name 'clock_t'; did you mean '_flock_t'?
方案:
在文件rtconfig.py]中 添加:
CFLAGS = DEVICE + ' -Dgcc -D_POSIX_C_SOURCE=200809L'
_POSIX_C_SOURCE 介绍
_POSIX_C_SOURCE 是一个宏定义,用于启用特定版本的 POSIX 兼容性特性。POSIX(Portable Operating System Interface)是一个旨在促进 UNIX 操作系统兼容性的标准集合,它定义了一系列跨不同 UNIX 系统的应用程序编程接口(API)。
在 C 语言源文件中定义 _POSIX_C_SOURCE 宏可以告诉编译器程序打算使用哪个版本的 POSIX 标准。这个宏的值是一个长整数,指定了希望遵循的 POSIX 标准的版本年份。
例如:
#define _POSIX_C_SOURCE 200809L
上面这行代码指示编译器启用 2008 年发布的 POSIX 标准中定义的特性。这可以确保在包含头文件时,只有那些与指定版本兼容的特性和函数原型被包含进来。
在配置编译环境时,你可以在命令行(编译选项中)或源文件的开始处定义这个宏。在命令行中,你可以使用 -D 选项定义它:
gcc -D_POSIX_C_SOURCE=200809L -o my_program my_program.c
在源文件中定义它要确保在包含任何标准库头文件之前定义该宏:
#define _POSIX_C_SOURCE 200809L
#include <stdio.h> #include <unistd.h> // 其他标准头文件
这样确保了在编译时,你的程序能够访问与定义的 POSIX 版本兼容的函数和特性。
编译结果
...
LINK rtthread.elf
arm-none-eabi-objcopy -O ihex rtthread.elf rtthread.hex
arm-none-eabi-size rtthread.elf
text data bss dec hex filename
46764 2460 2548 51772 ca3c rtthread.elf
arm-none-eabi-objcopy -O binary rtthread.elf rtthread.bin
arm-none-eabi-size rtthread.elf
text data bss dec hex filename
46764 2460 2548 51772 ca3c rtthread.elf
scons: done building targets.
至此成功编译。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!