RT-Thread(RTT)之SPI设备使用(以驱动nrf24l01模块为例)
2023-12-28 20:02:52
前言
本文目的,了解SPI和如何使用RT-Thread的SPI设备,通过SPI向nrf24l01模块中的寄存器写数据,再把数据读出来,验证数据是否一致,以验证SPI设备配置正确,是否能够正常使用
一、SPI简介
1、SPI是Serial Peripherl Interface的缩写,中文意思是串行外围设备接口。
2、SPI主要应用于EEPROM、FLASH、实时时钟、AD转换器,数字信号处理器、数字信号解码器
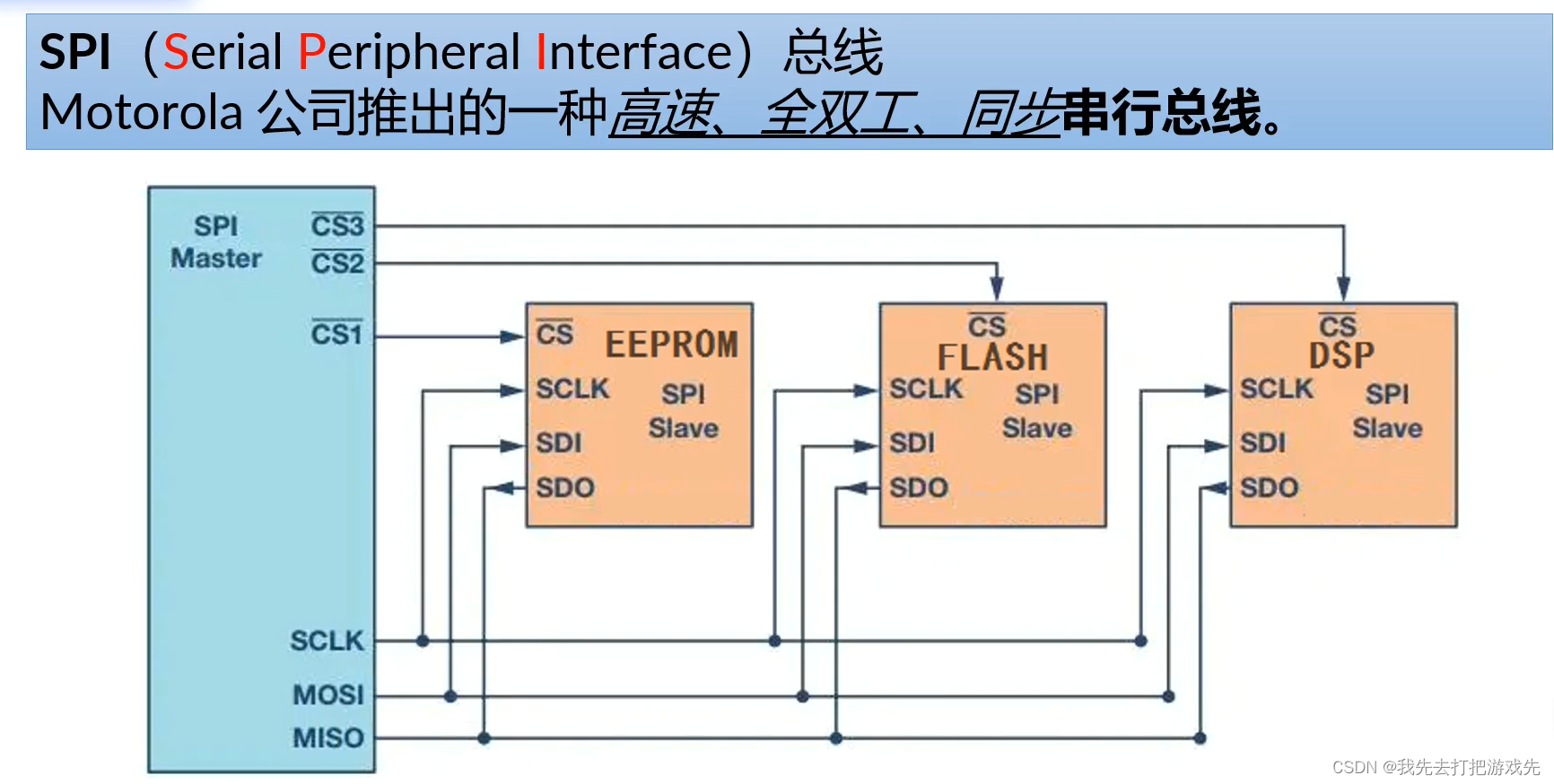
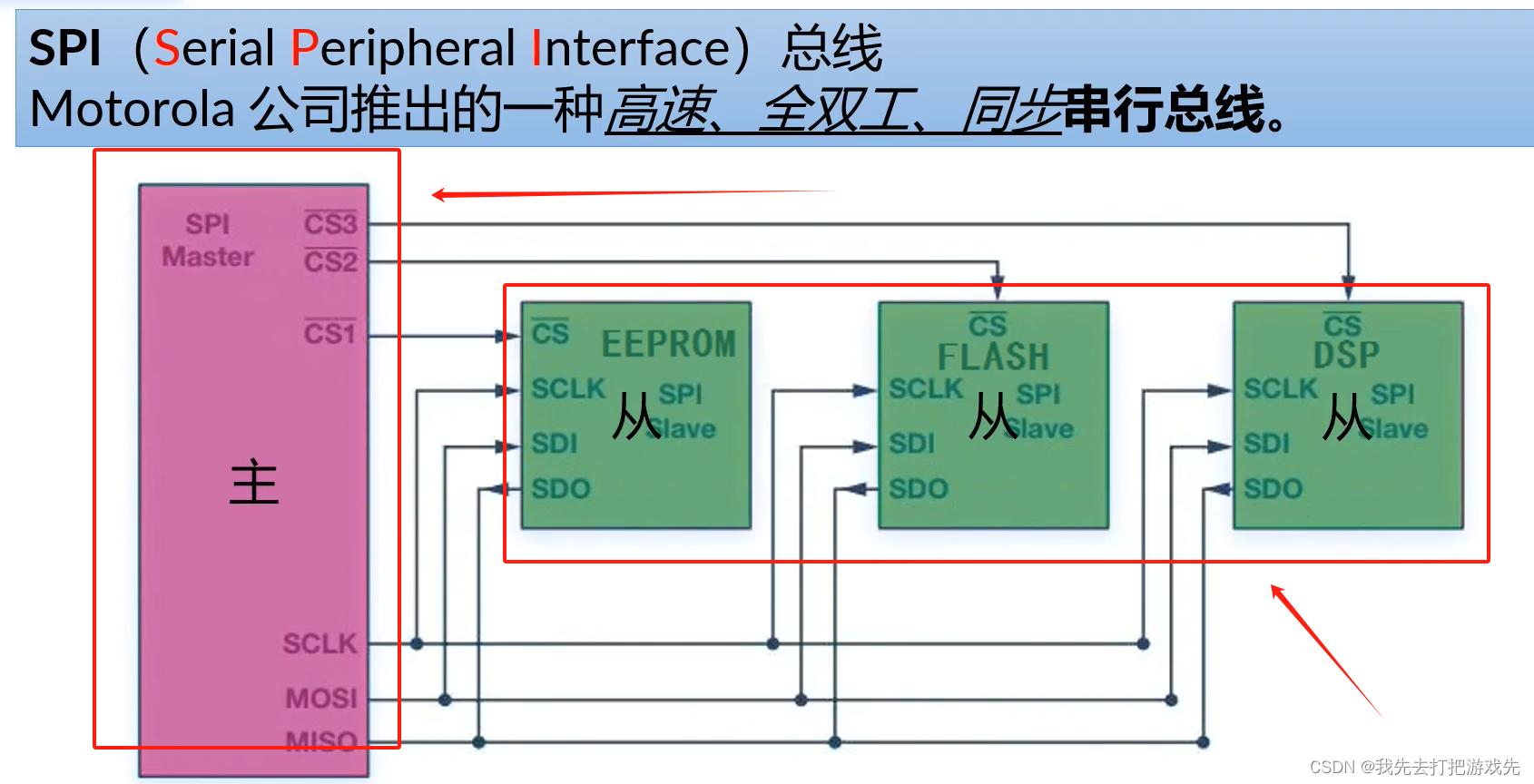
3、SPI采用主从工作方式,总线上有一个主设备和多个从设备
4、SPI传输数据时需要最多四根信号线分别是:
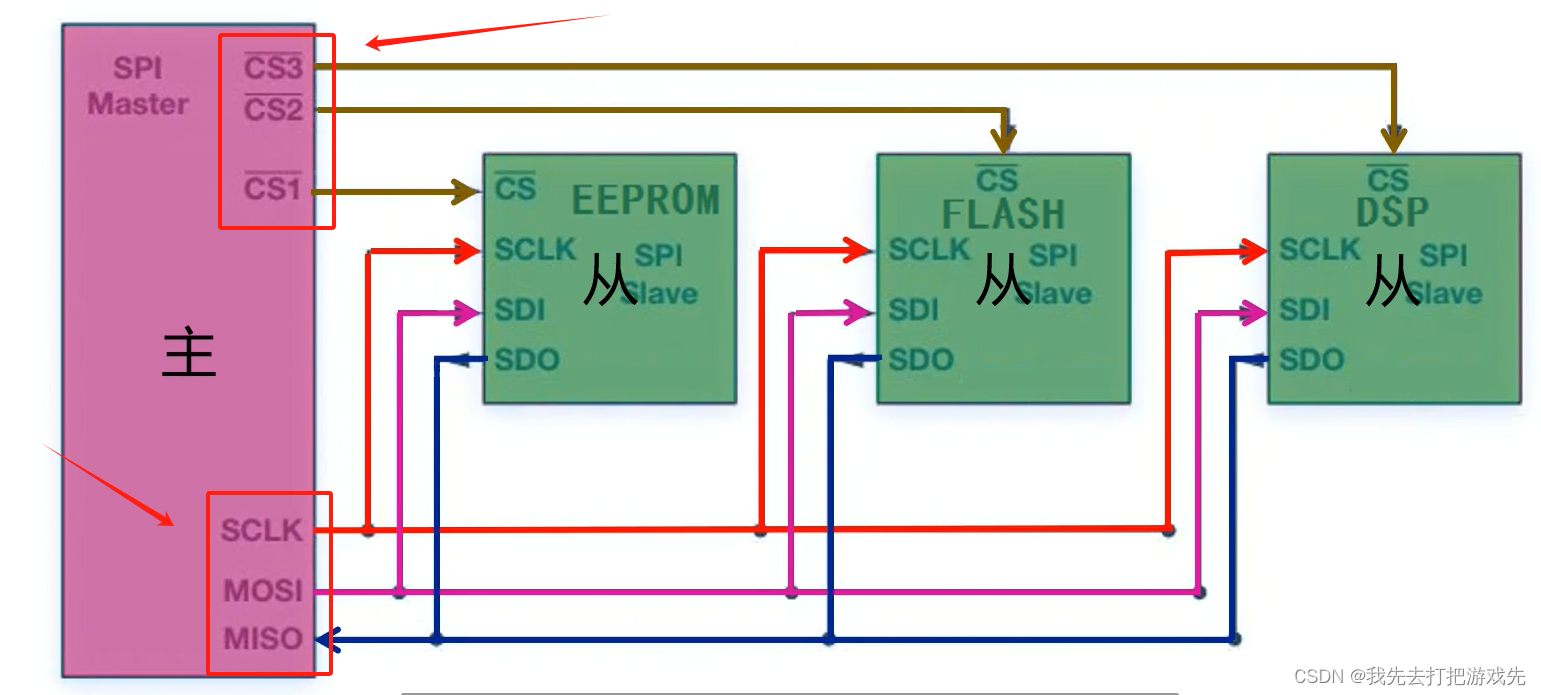
串行时钟信号SCLK由主设备产生发送给从设备;
MOSI主出从入引脚,主设备输出数据从设备接收数据;
MISO主入从出引脚,主设备接收数据从设备输出数据;
CS片选信号,由主设备输出的使能信号,用来选择与主设备通信的从设备
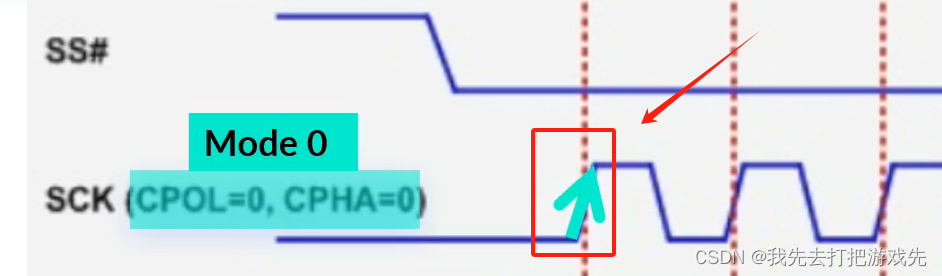
5、SPI总线有四种工作方式,取决于时钟极性CPOL和时钟相位CPHA
- CPOL定义了SCLK空闲时的状态电平

- CPHA定义了数据采集边沿

- 因此SPI通信有四种不同的工作模式,由时钟极性CPOL和时钟相位CPHA的组合决定
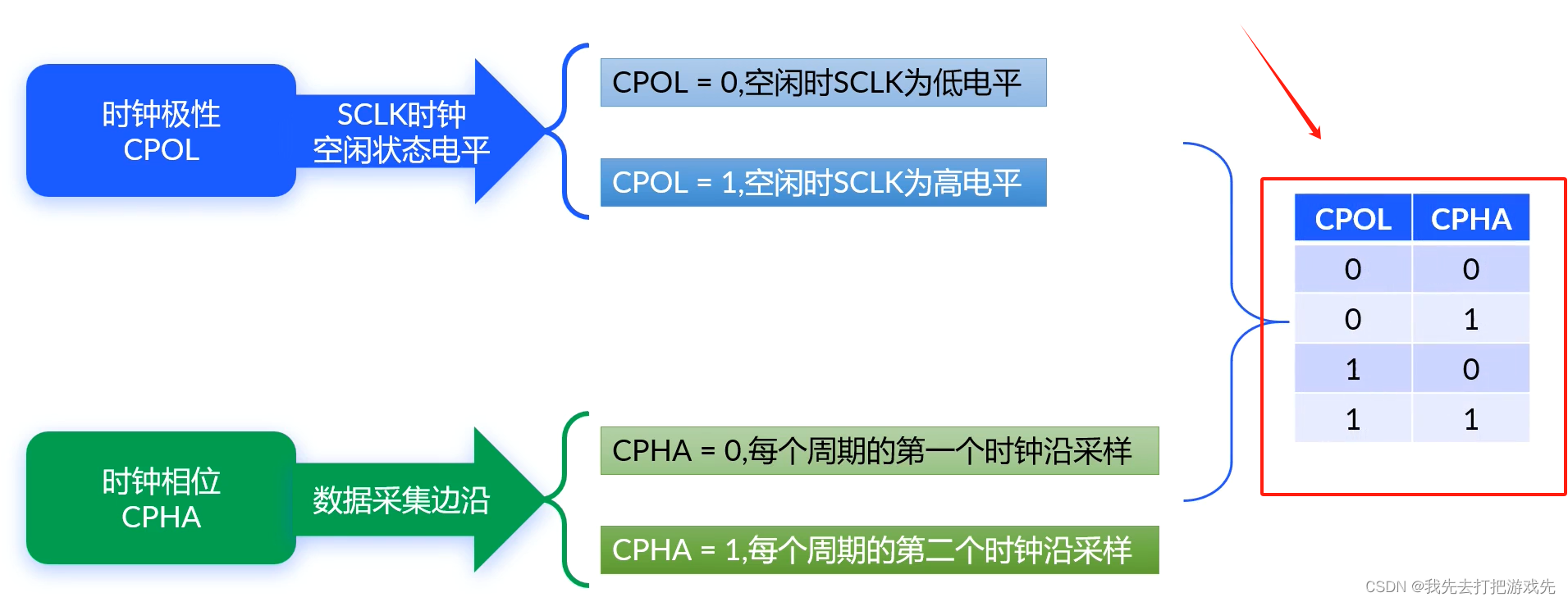
- 模式0:当CPOL=0和CPHA=0时,空闲时时钟为低电平,第一个时钟沿采样,因此模式0是在时钟上升沿进行采样
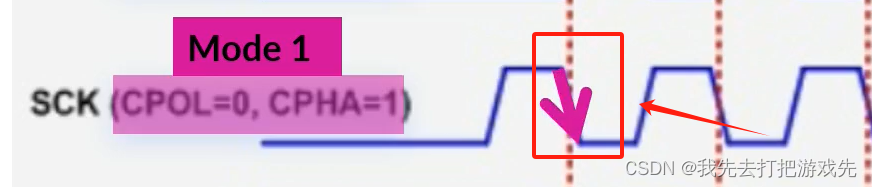
- 模式1:当CPOL=0和CPHA=1时,空闲时时钟为低电平,第二个时钟沿采样,因此模式1是在时钟下降沿进行采样
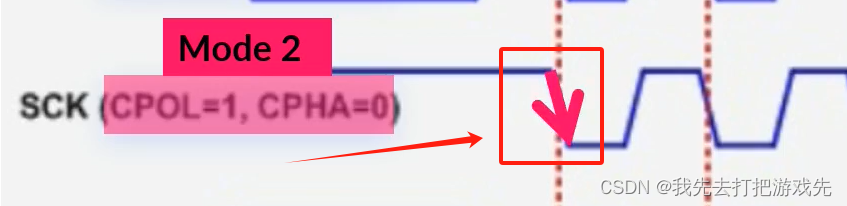
- 模式2:当CPOL=1和CPHA=0时,空闲时时钟为高电平,第一个时钟沿采样,因此模式2是在时钟下降沿采样
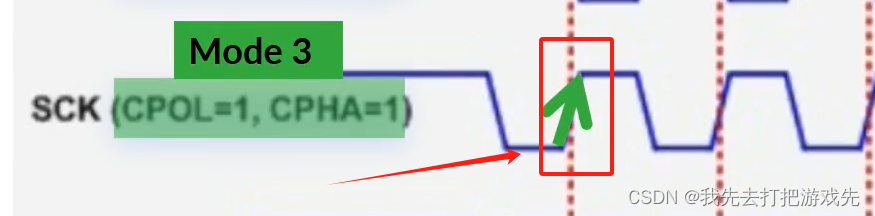
- 模式3:当CPOL=1和CPHA=1时,空闲时钟为高电平,第二个时钟沿采样,因此模式3是在时钟上升沿采样
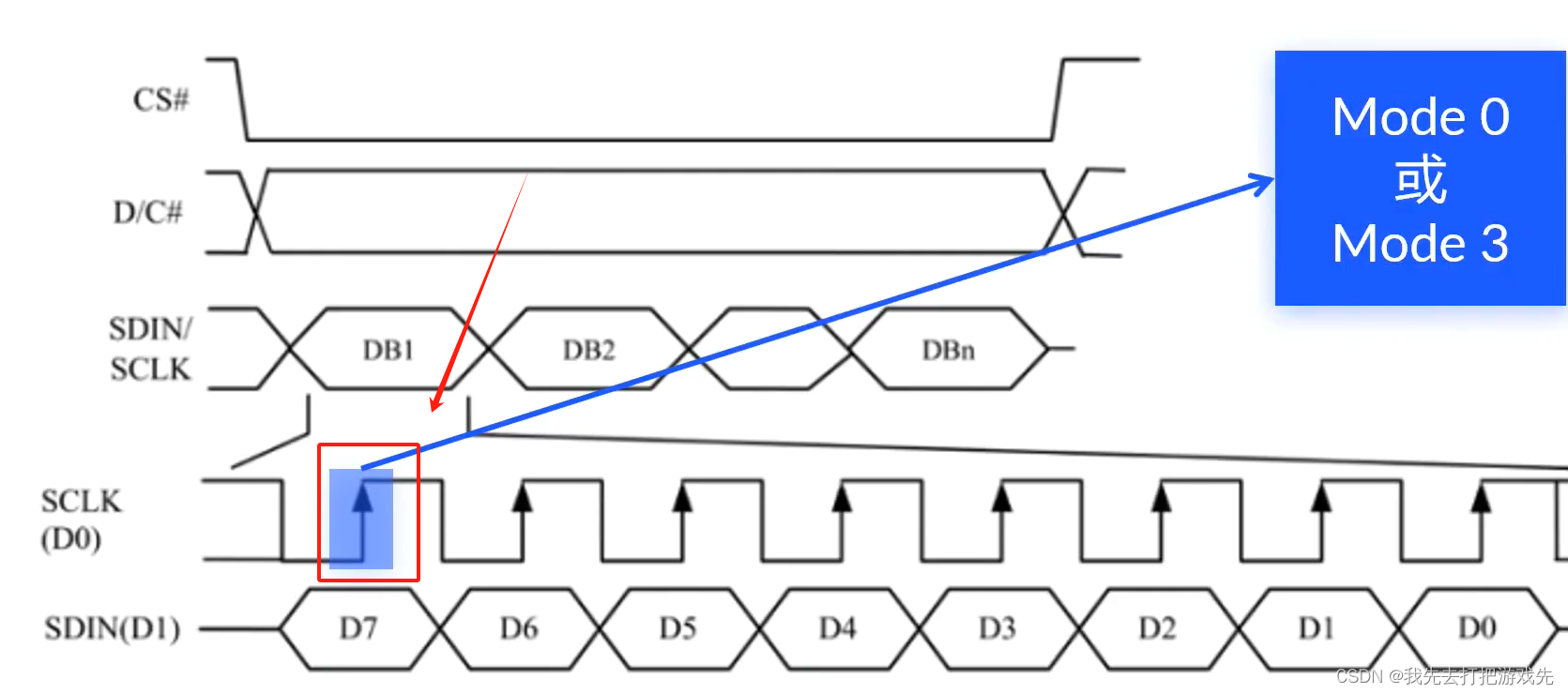
- 在使用到SPI通信时,在确定CPOL和CPHA时,要以数据手册中的时序图为准,举个例子,下图是彩色OLED控制器SSD1351数据手册中关于SPI通信的时序图描述,可以看到手册中规定了时钟上升沿采样,所以我们配置SPI工作方式时只能选择模式0或模式3
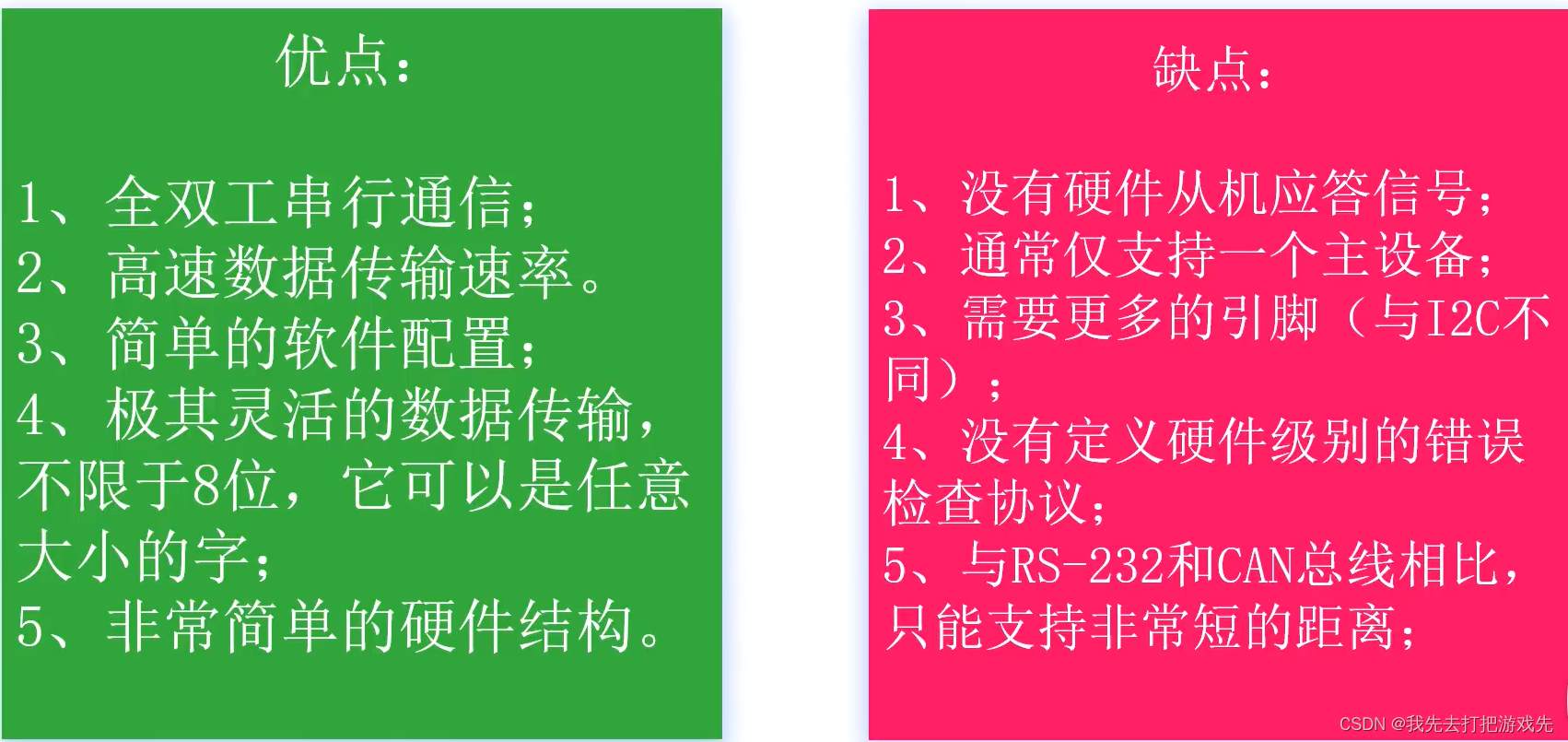
6、SPI通信的优点和缺点
二、通过SPI向NRF24L01模块写数据再读出来,验证数据是否一致
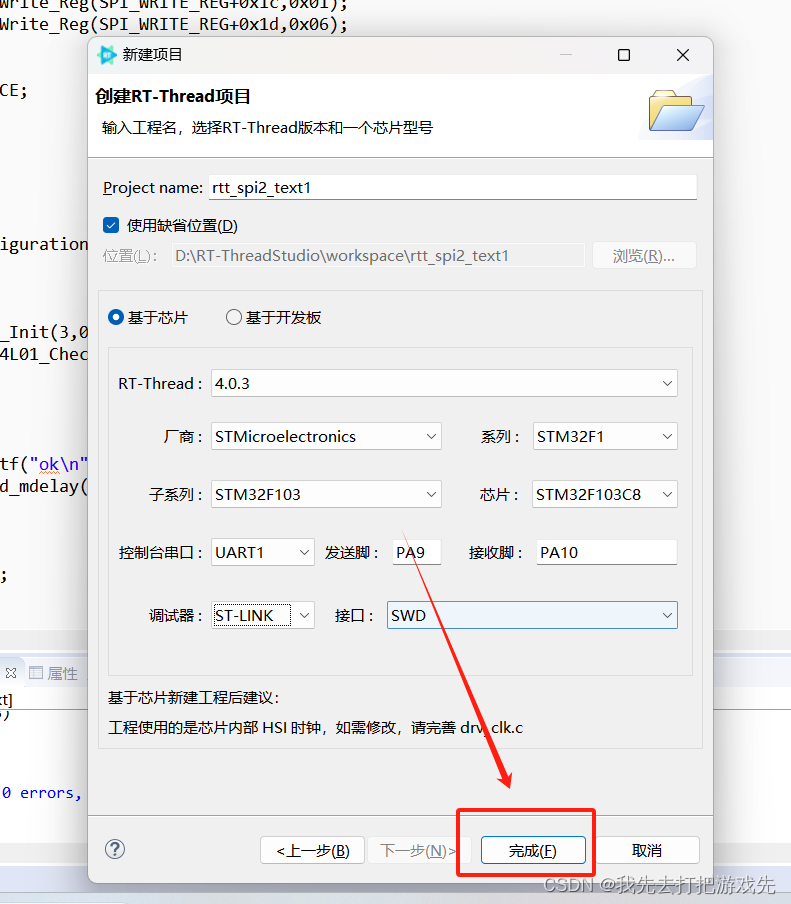
1、创建一个工程
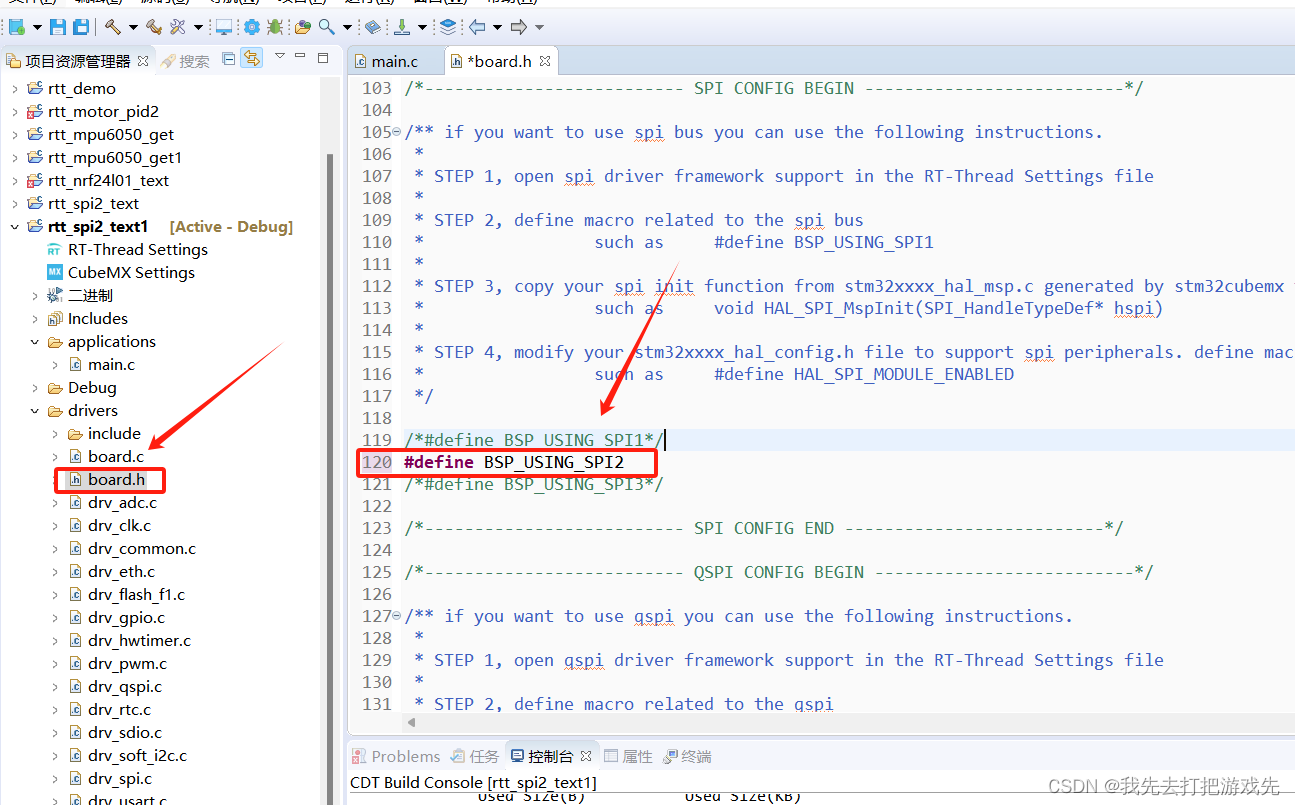
2、在board.h中打开SPI的注释,使用SPI几需要查看你自己板子上的硬件连接图
3、在RT-Thread Settings中打开SPI驱动程序使能

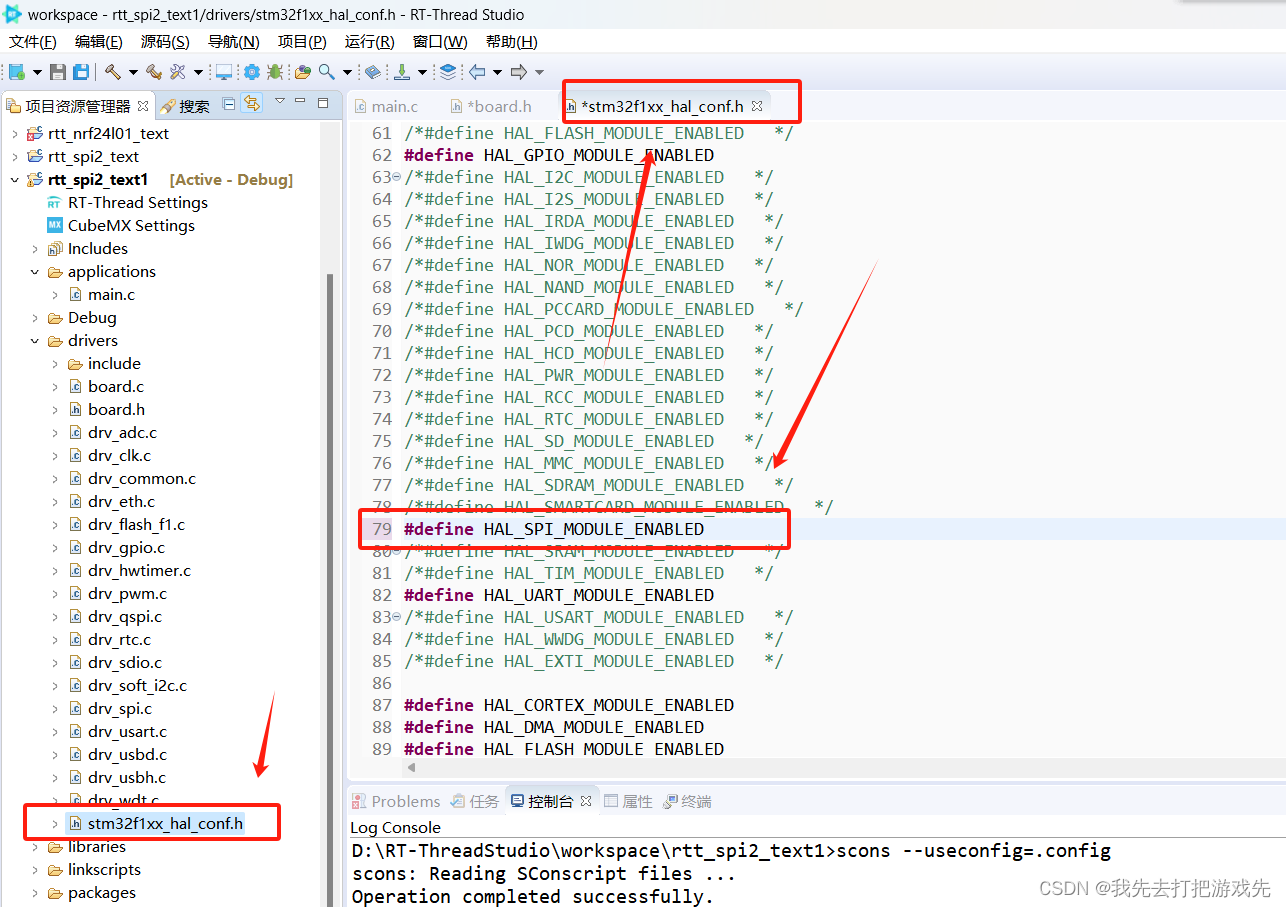
4、打开SPI模块使能注释
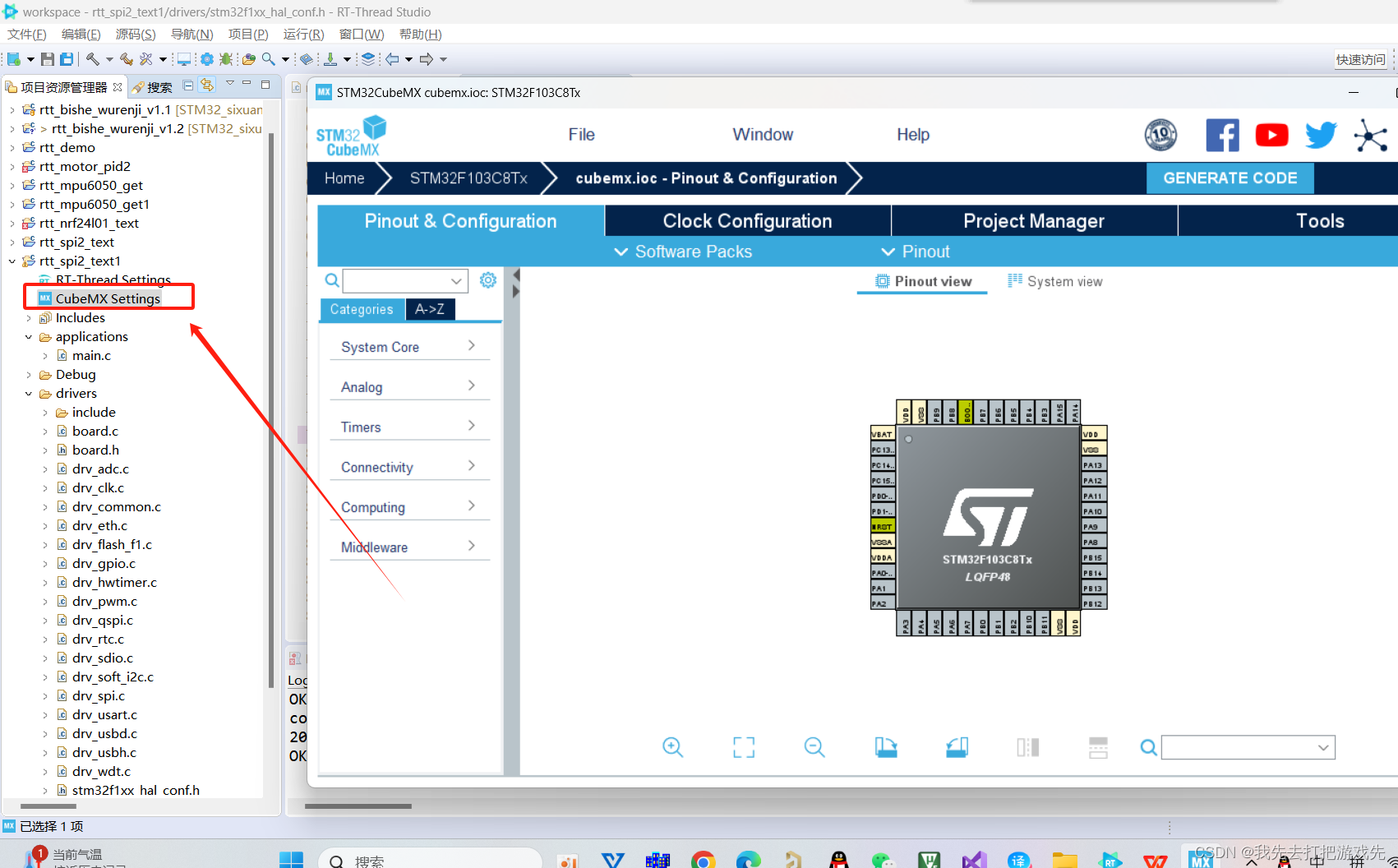
5、打开CubeMX进行配置
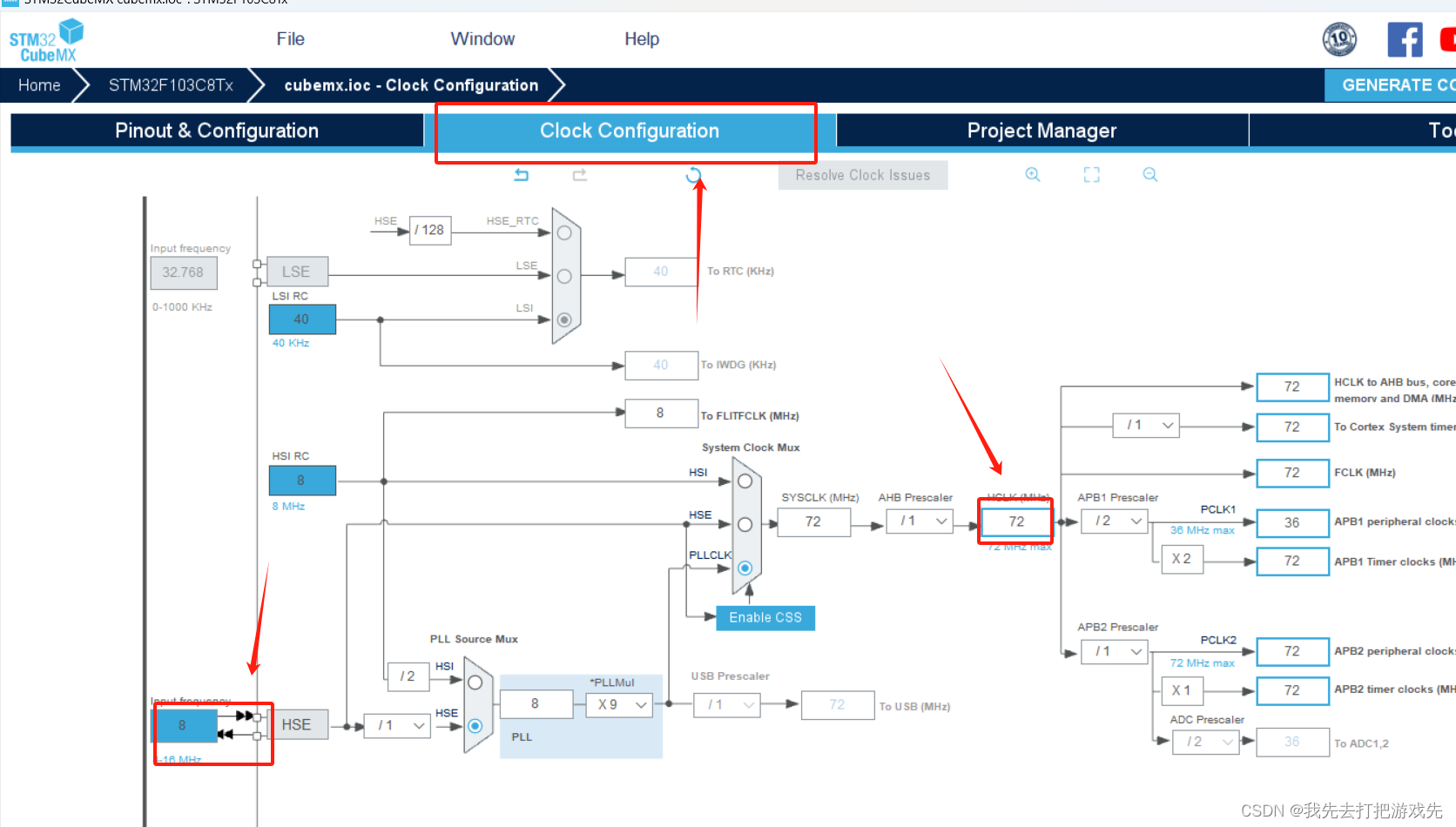
6、使用外部高速晶振作为时钟源

7、配置一下时钟线,频率直接拉满
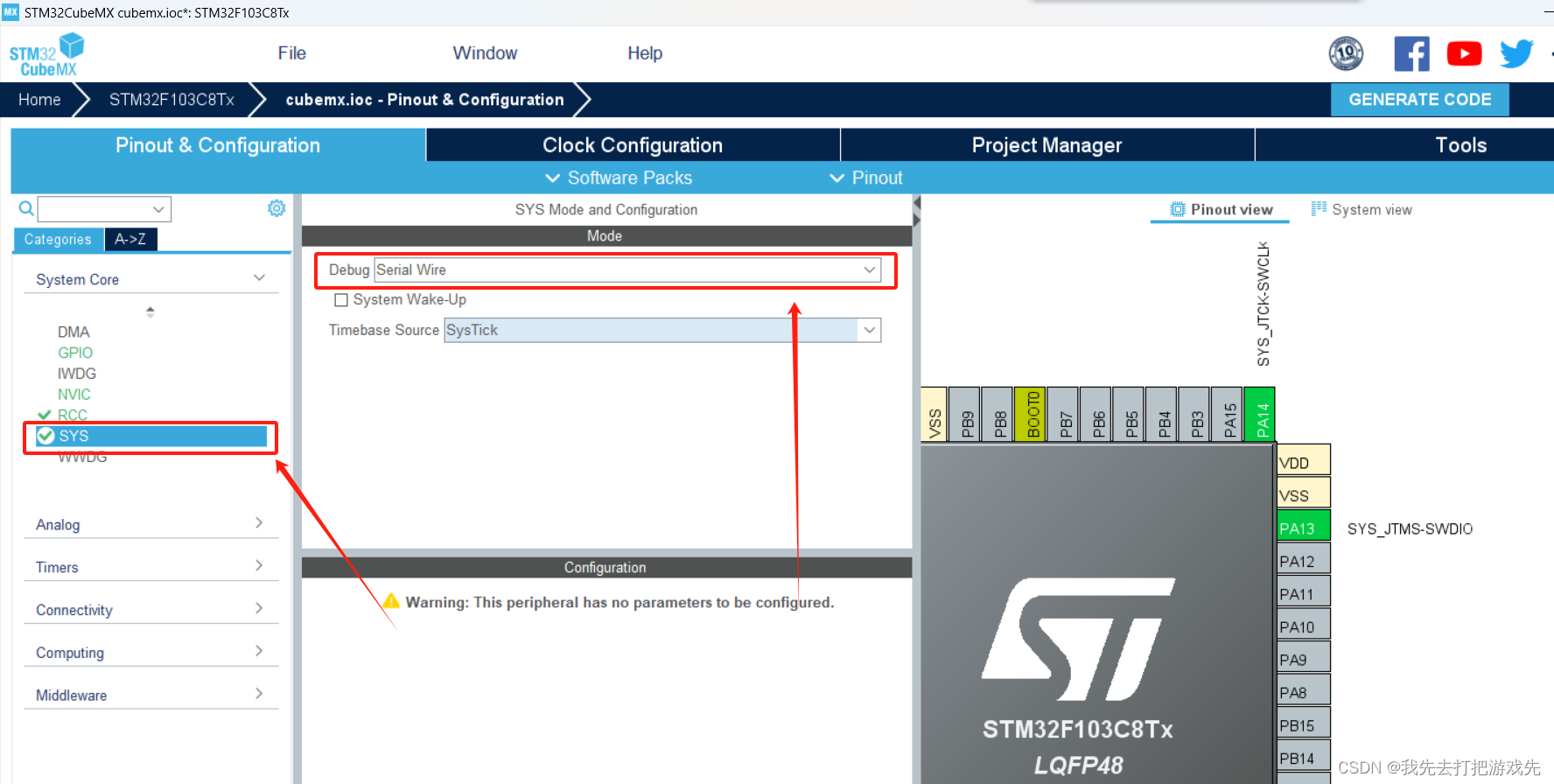
8、配置调试接口
9、打开串口一,因为在创建工程的使用默认使用了串口一,所以这里也配置一下
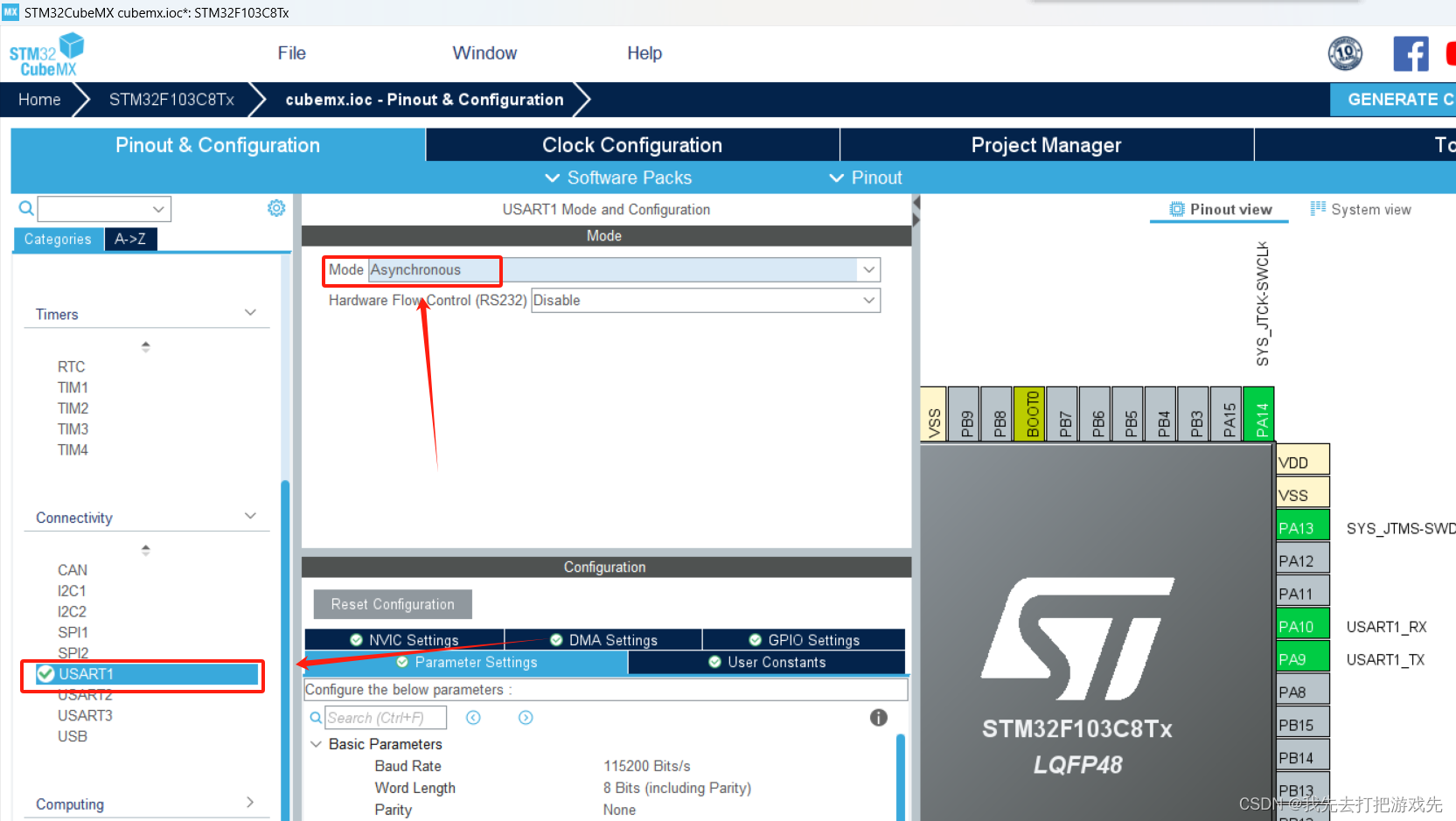
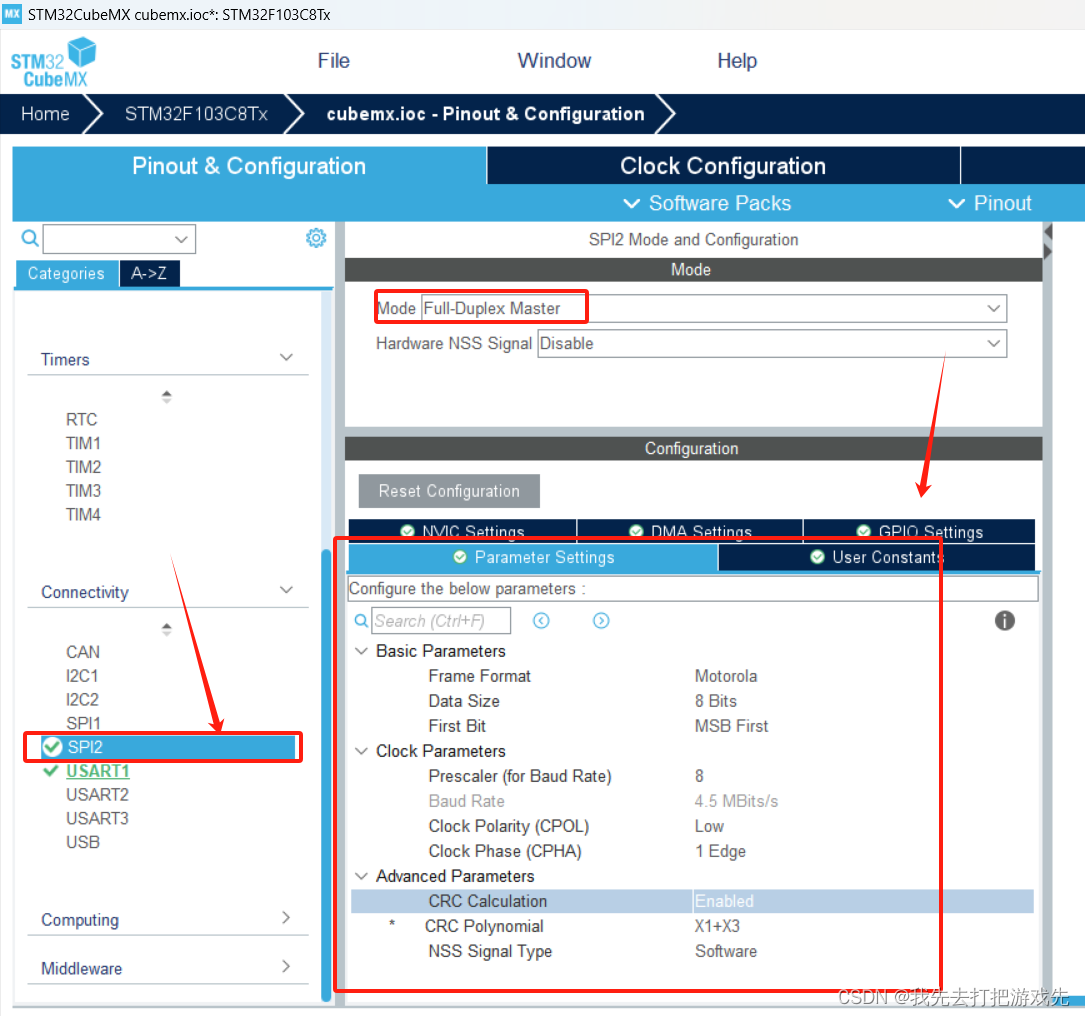
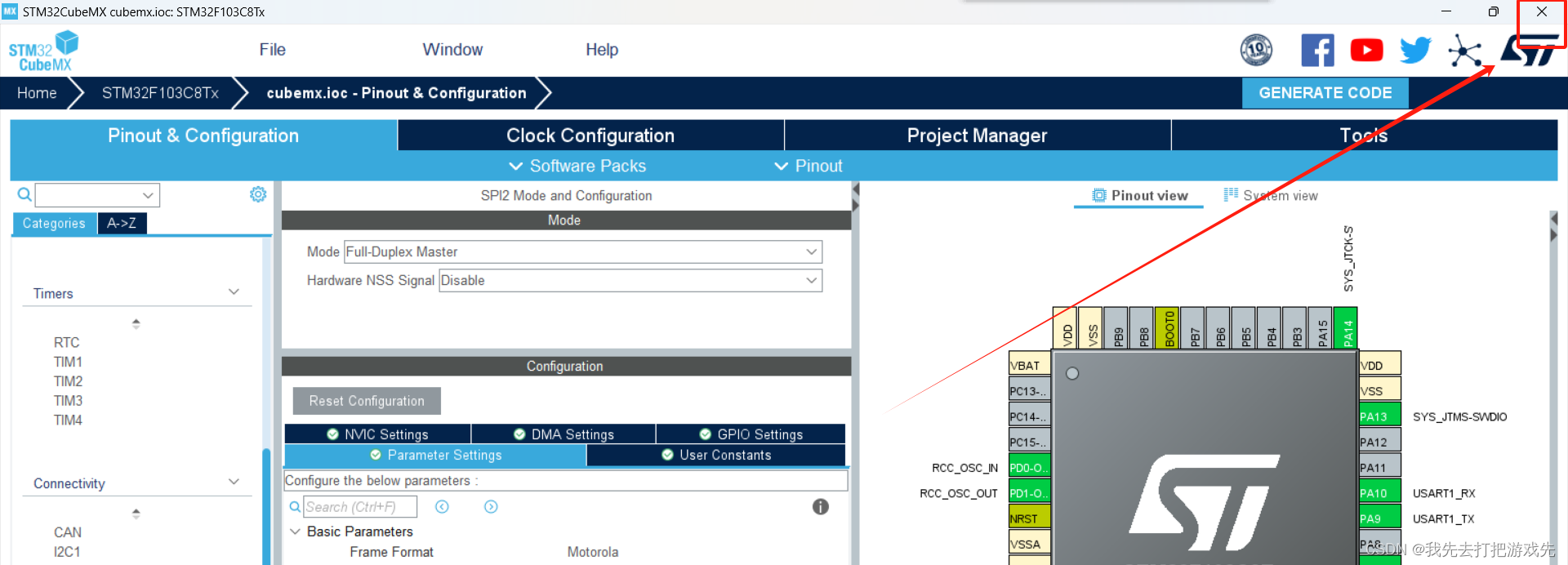
10、配置SPI,二线全双工主模式

11、SPI参数配置
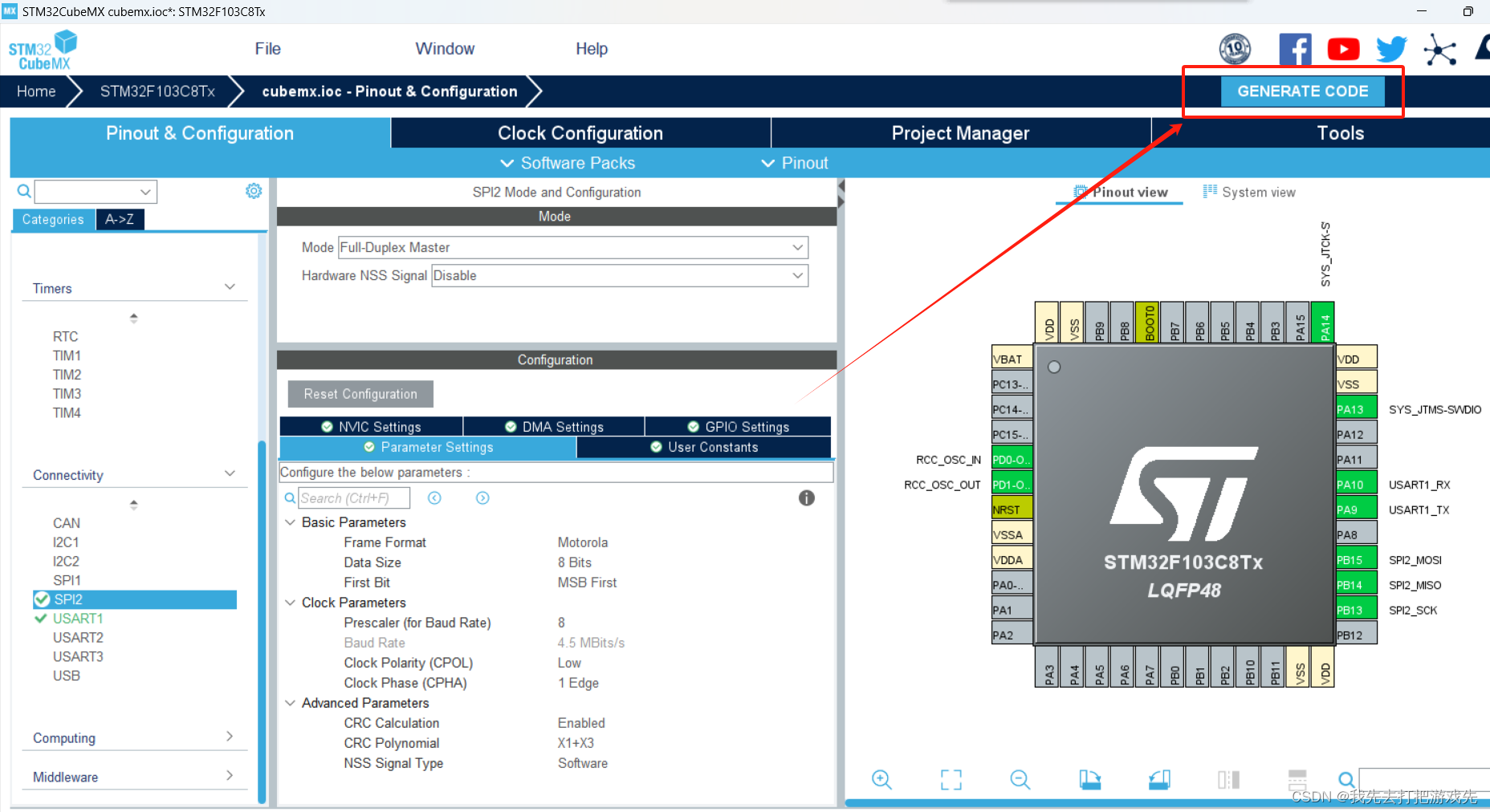
12、生成代码
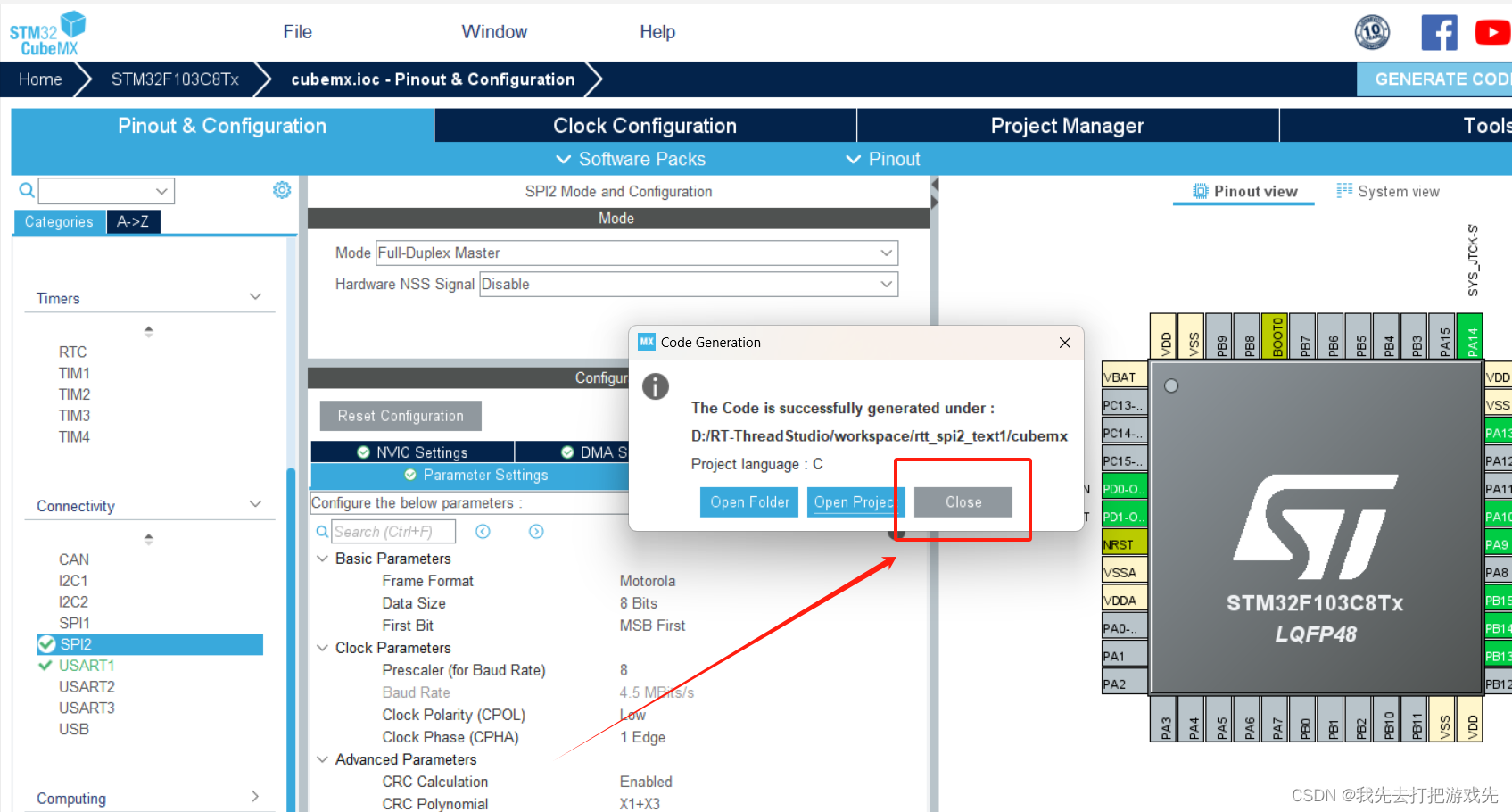
13、点击Close
14、关掉CubeMX
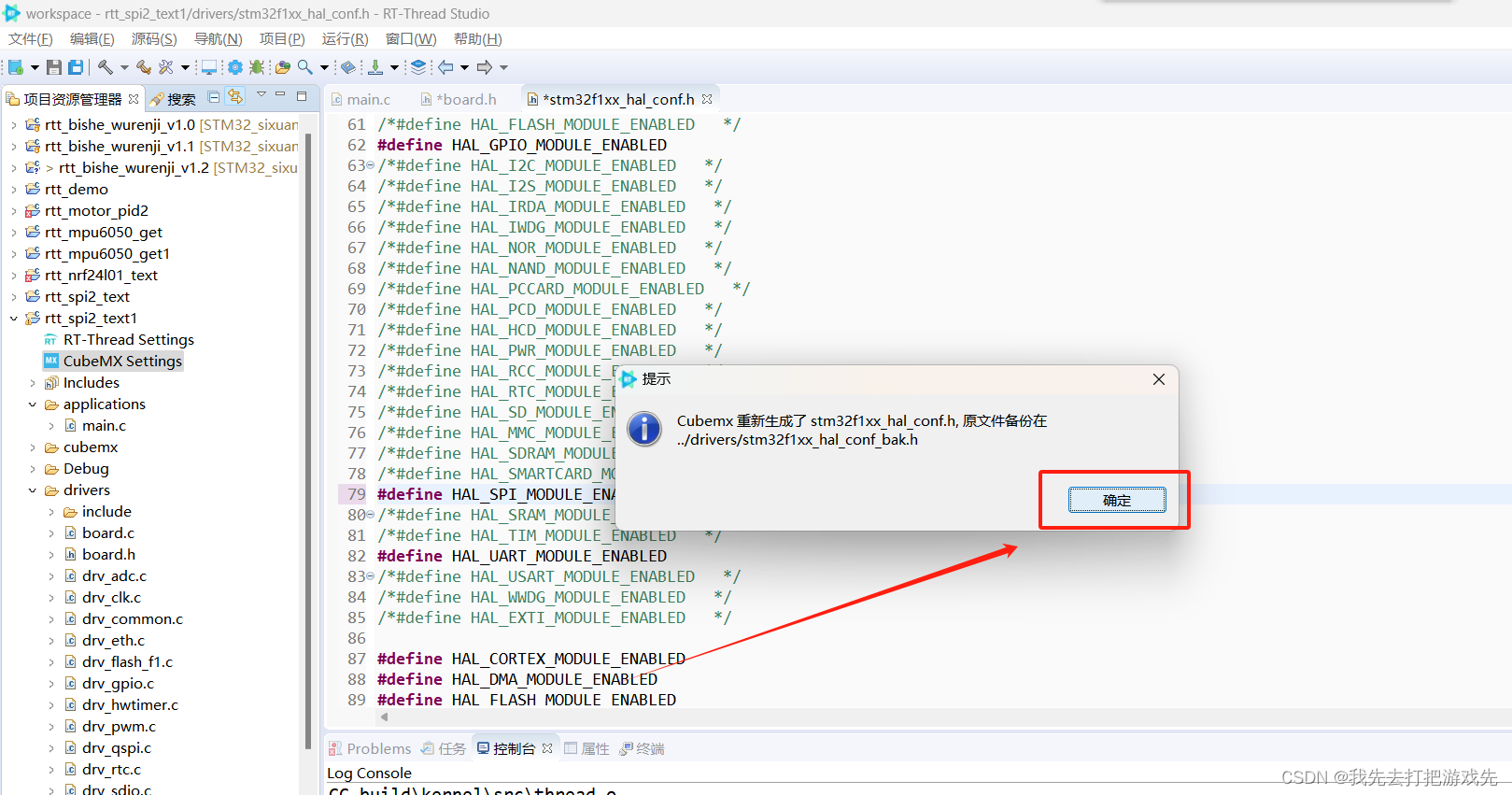
15、点击确定
16、复制CubeMX自动生成的HAL_SPI_MspInit这段代码
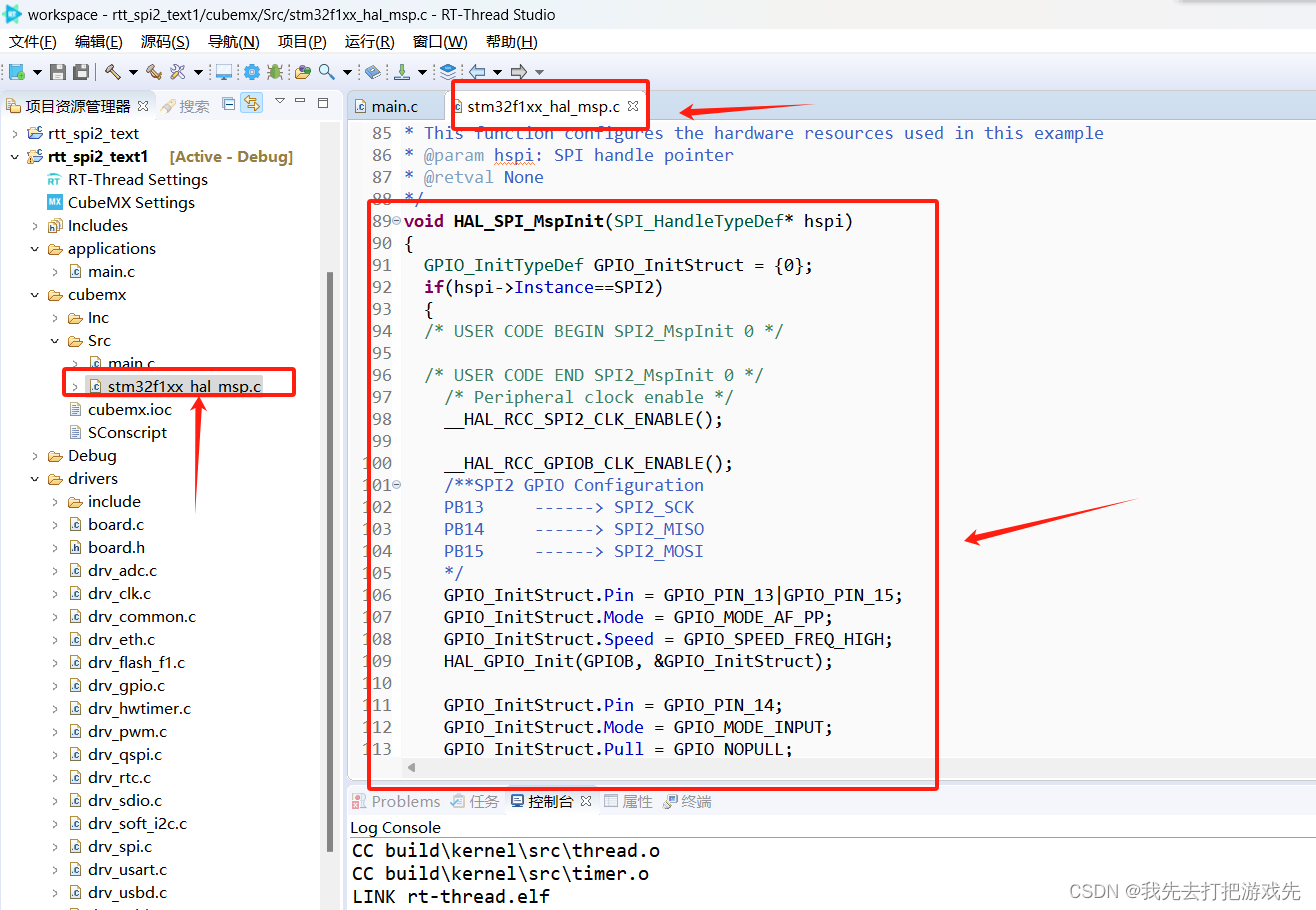
17、粘贴到board.c的末尾

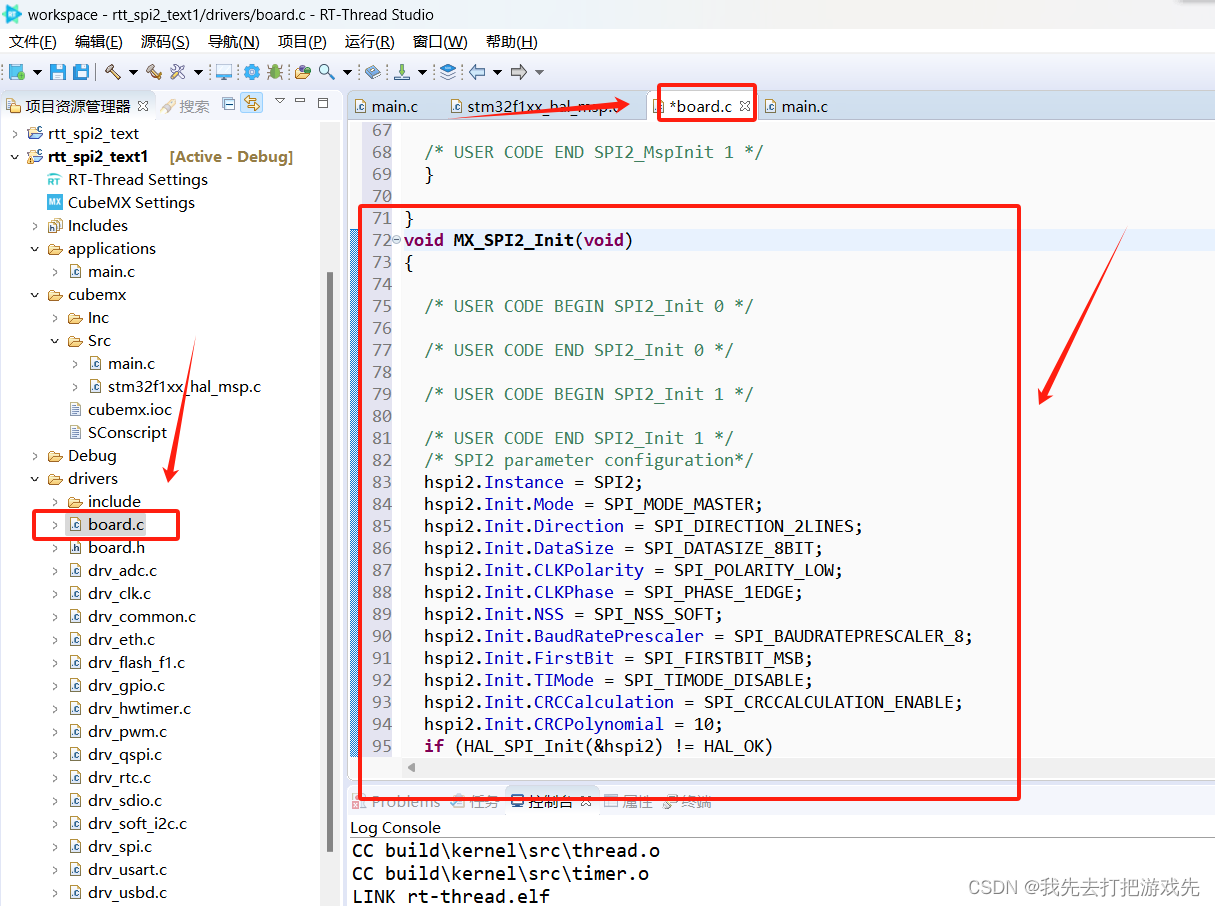
18、复制CubeMX自动生成的MX_SPI2_Init这段代码
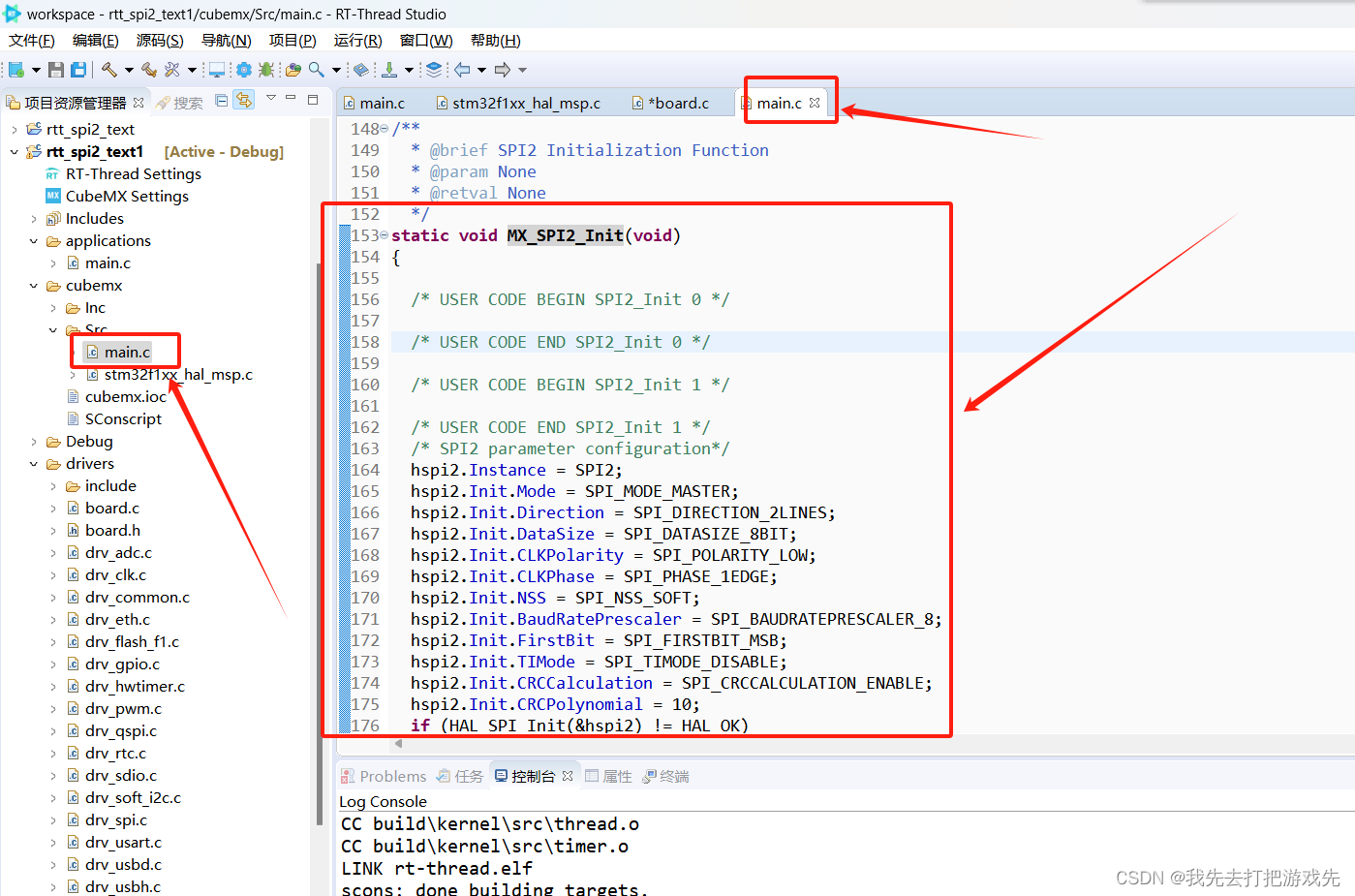
19、粘贴到board.c的末尾,记得把static关键字去掉
20、编译一下,有如下报错

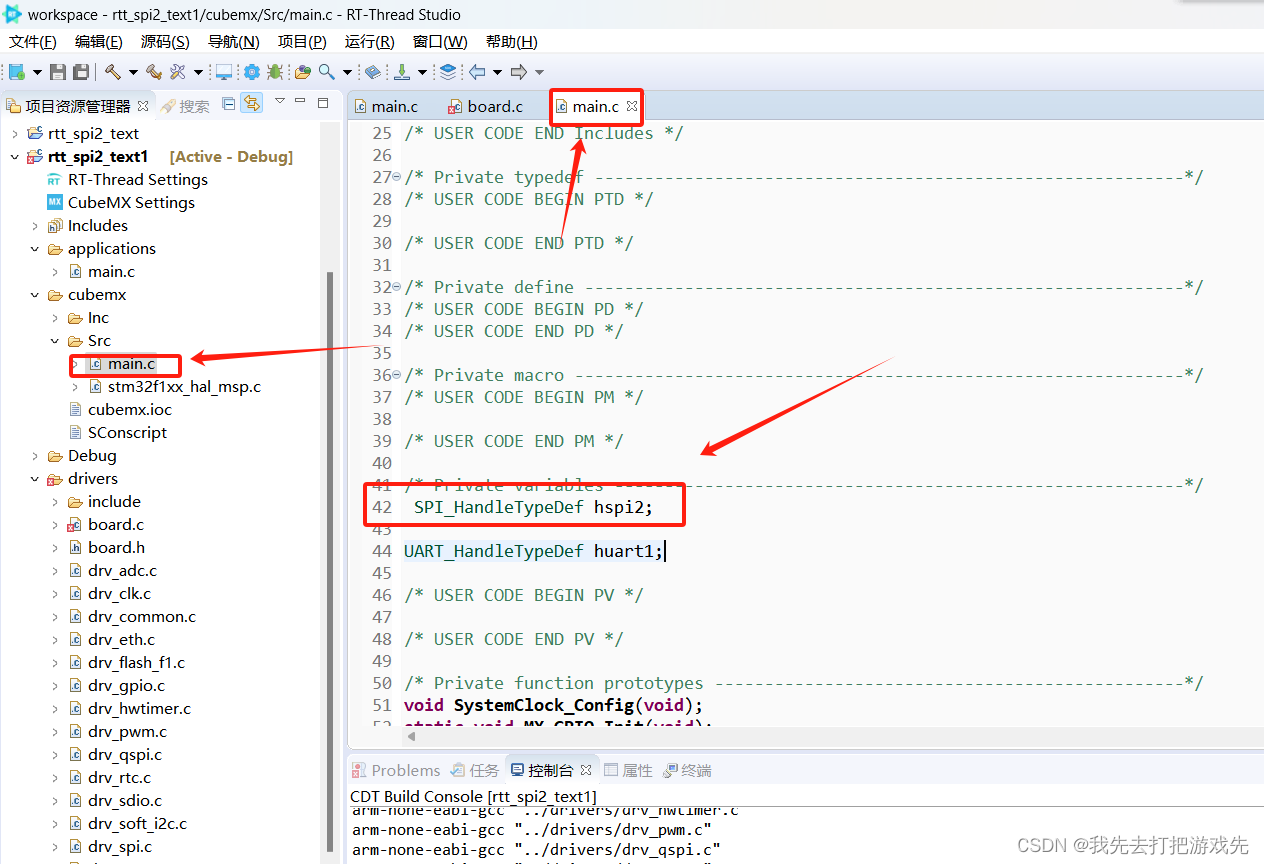
21、回到cubemx文件夹下的main.c文件中复制spi2句柄
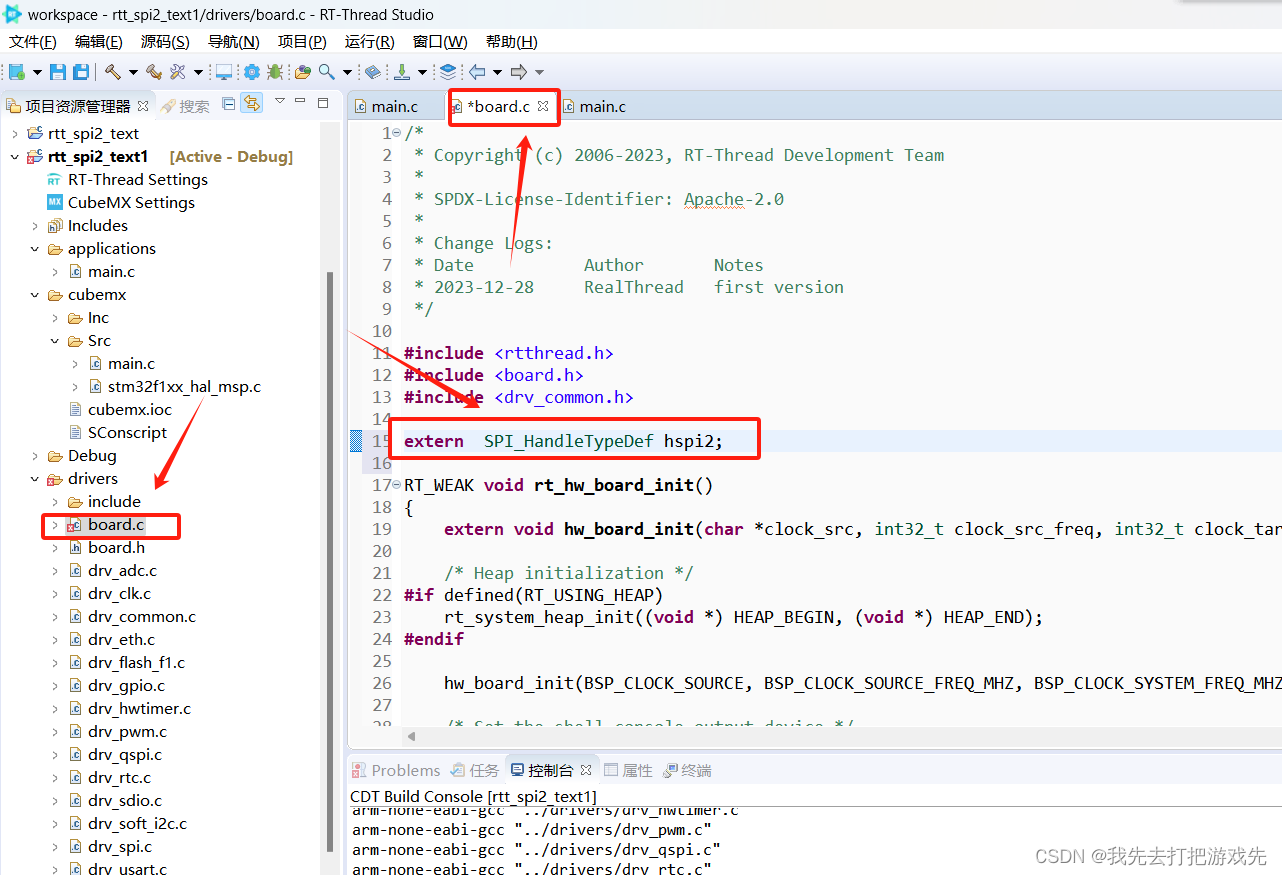
22、粘贴到board.c文件的前面,并加上extern关键字
23、再编译一下,报错说函数重定义

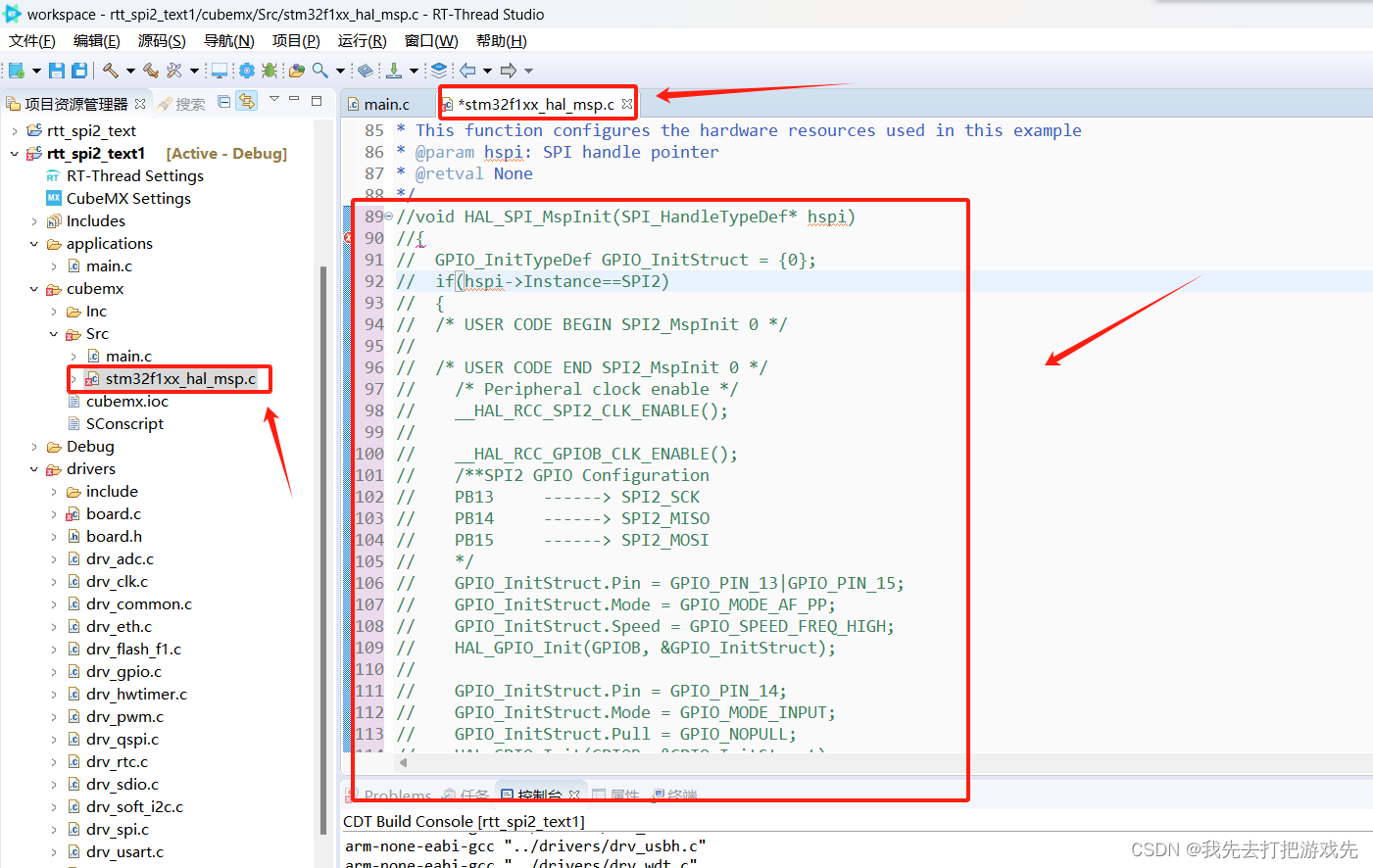
24、双击错误,跳转进去后在cubemx文件夹下刚刚CubeMX自动生成的HAL_SPI_Msp_Init函数注释掉
25、再编译,无报错

26、在man.c主函数中输入如下代码
/*
* Copyright (c) 2006-2023, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2023-12-21 RT-Thread first version
*/
#include <rtthread.h>
#include <rtdevice.h>
#include <drv_common.h>
#include <board.h>
#include "drv_spi.h"
//NRF24L01寄存器操作命令
#define SPI_READ_REG 0x00 //读配置寄存器,低5位为寄存器地址
#define SPI_WRITE_REG 0x20 //写配置寄存器,低5位为寄存器地址
#define R_RX_PL_WID 0x60
#define RD_RX_PLOAD 0x61 //读RX有效数据,1~32字节
#define WR_TX_PLOAD 0xA0 //写TX有效数据,1~32字节
#define FLUSH_TX 0xE1 //清除TX FIFO寄存器.发射模式下用
#define FLUSH_RX 0xE2 //清除RX FIFO寄存器.接收模式下用
#define REUSE_TX_PL 0xE3 //重新使用上一包数据,CE为高,数据包被不断发送.
#define NOP 0xFF //空操作,可以用来读状态寄存器
//SPI(NRF24L01)寄存器地址
#define NCONFIG 0x00 //配置寄存器地址;bit0:1接收模式,0发射模式;bit1:电选择;bit2:CRC模式;bit3:CRC使能;
//bit4:中断MAX_RT(达到最大重发次数中断)使能;bit5:中断TX_DS使能;bit6:中断RX_DR使能
#define EN_AA 0x01 //使能自动应答功能 bit0~5,对应通道0~5
#define EN_RXADDR 0x02 //接收地址允许,bit0~5,对应通道0~5
#define SETUP_AW 0x03 //设置地址宽度(所有数据通道):bit1,0:00,3字节;01,4字节;02,5字节;
#define SETUP_RETR 0x04 //建立自动重发;bit3:0,自动重发计数器;bit7:4,自动重发延时 250*x+86us
#define RF_CH 0x05 //RF通道,bit6:0,工作通道频率;
#define RF_SETUP 0x06 //RF寄存器;bit3:传输速率(0:1Mbps,1:2Mbps);bit2:1,发射功率;bit0:低噪声放大器增益
#define STATUS 0x07 //状态寄存器;bit0:TX FIFO满标志;bit3:1,接收数据通道号(最大:6);bit4,达到最多次重发
//bit5:数据发送完成中断;bit6:接收数据中断;
#define MAX_TX 0x10 //达到最大发送次数中断
#define TX_OK 0x20 //TX发送完成中断
#define RX_OK 0x40 //接收到数据中断
#define OBSERVE_TX 0x08 //发送检测寄存器,bit7:4,数据包丢失计数器;bit3:0,重发计数器
#define CD 0x09 //载波检测寄存器,bit0,载波检测;
#define RX_ADDR_P0 0x0A //数据通道0接收地址,最大长度5个字节,低字节在前
#define RX_ADDR_P1 0x0B //数据通道1接收地址,最大长度5个字节,低字节在前
#define RX_ADDR_P2 0x0C //数据通道2接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define RX_ADDR_P3 0x0D //数据通道3接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define RX_ADDR_P4 0x0E //数据通道4接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define RX_ADDR_P5 0x0F //数据通道5接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define TX_ADDR 0x10 //发送地址(低字节在前),ShockBurstTM模式下,RX_ADDR_P0与此地址相等
#define RX_PW_P0 0x11 //接收数据通道0有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P1 0x12 //接收数据通道1有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P2 0x13 //接收数据通道2有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P3 0x14 //接收数据通道3有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P4 0x15 //接收数据通道4有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P5 0x16 //接收数据通道5有效数据宽度(1~32字节),设置为0则非法
#define FIFO_STATUS 0x17 //FIFO状态寄存器;bit0,RX FIFO寄存器空标志;bit1,RX FIFO满标志;bit2,3,保留
//bit4,TX FIFO空标志;bit5,TX FIFO满标志;bit6,1,循环发送上一数据包.0,不循环;
//配对密码
const uint8_t TX_ADDRESS[]= {0xAA,0xBB,0xCC,0x00,0x01}; //本地地址
const uint8_t RX_ADDRESS[]= {0xAA,0xBB,0xCC,0x00,0x01}; //接收地址RX_ADDR_P0 == RX_ADDR
//NRF24L01发送接收数据宽度定义
#define TX_ADR_WIDTH 5 //5字节的地址宽度
#define RX_ADR_WIDTH 5 //5字节的地址宽度
#define TX_PLOAD_WIDTH 32 //20字节的用户数据宽度
#define RX_PLOAD_WIDTH 32 //20字节的用户数据宽度
#define NRF24L01_CSN_PIN GET_PIN(B,12) //片选引脚
#define NRF24L01_CE_PIN GET_PIN(A,11) //激活RX或TX模式
#define NRF24L01_IRQ_PIN GET_PIN(A,12) //中断信号引脚,低电平有效
//24L01操作线
#define Set_NRF24L01_CSN rt_pin_write(NRF24L01_CSN_PIN,PIN_HIGH) //拉高CSN
#define Clr_NRF24L01_CSN rt_pin_write(NRF24L01_CSN_PIN,PIN_LOW) // 拉低CSN
#define Set_NRF24L01_CE rt_pin_write(NRF24L01_CE_PIN,PIN_HIGH) // 拉高CE
#define Clr_NRF24L01_CE rt_pin_write(NRF24L01_CE_PIN,PIN_LOW) // 拉低CE
#define READ_NRF24L01_IRQ rt_pin_read(NRF24L01_IRQ_PIN) //读中断引脚
#define NRF24L01_SPI_BUS "spi2" //spi2总线
#define NRF24L01_SPI_DEV_NAME "spi20" //总线上的设备名,0号设备
static struct rt_spi_device *spi_dev_nrf24l01; //spi设备句柄
//nrf204l01模块初始化
static void nrf24ll01_spi_init(void)
{
//将spi设备挂载到总线
rt_hw_spi_device_attach(NRF24L01_SPI_BUS,NRF24L01_SPI_DEV_NAME,GPIOB,GPIO_PIN_12);
/* 查找 spi 设备获取设备句柄 */
spi_dev_nrf24l01 = (struct rt_spi_device *)rt_device_find(NRF24L01_SPI_DEV_NAME);
//配置spi参数
struct rt_spi_configuration cfg;
cfg.data_width = 8;//数据宽度为八位
cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_0 | RT_SPI_MSB;
cfg.max_hz = 5*1000*1000; //最大波特率,因为在cubemx配置分频后,spi2的波特率是4.5M,所以这里最大就写5了
rt_spi_configure(spi_dev_nrf24l01, &cfg);
}
//初始化24L01的IO口
static void NRF24L01_Configuration(void)
{
rt_pin_mode(NRF24L01_CE_PIN,PIN_MODE_OUTPUT);
rt_pin_mode(NRF24L01_IRQ_PIN,PIN_MODE_INPUT_PULLUP);//中断引脚上拉输入
rt_pin_mode(NRF24L01_CSN_PIN,PIN_MODE_OUTPUT); //片选引脚推挽输出
Set_NRF24L01_CE; //初始化时先拉高
Set_NRF24L01_CSN; //初始化时先拉高
nrf24ll01_spi_init(); //配置spi
Clr_NRF24L01_CE; //使能24L01
Set_NRF24L01_CSN; //SPI片选取消
}
//通过SPI写寄存器
rt_uint8_t NRF24L01_Write_Reg(rt_uint8_t regaddr,rt_uint8_t data)
{
rt_uint8_t status;
status = rt_spi_send_then_send(spi_dev_nrf24l01,®addr,1,&data,1);
return(status); //返回状态值
}
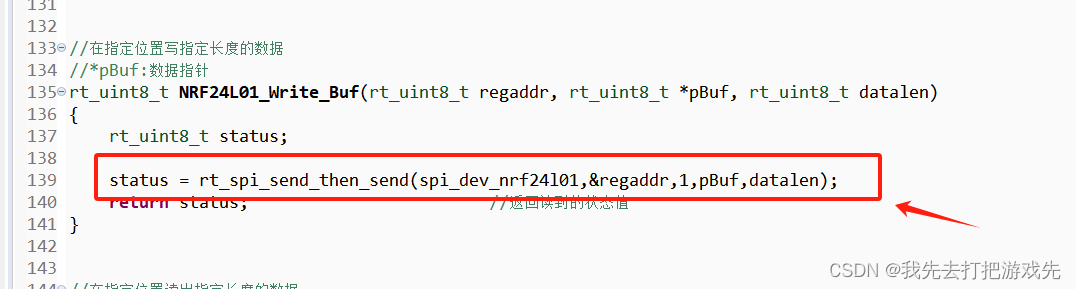
//在指定位置写指定长度的数据
//*pBuf:数据指针
rt_uint8_t NRF24L01_Write_Buf(rt_uint8_t regaddr, rt_uint8_t *pBuf, rt_uint8_t datalen)
{
rt_uint8_t status;
status = rt_spi_send_then_send(spi_dev_nrf24l01,®addr,1,pBuf,datalen);
return status; //返回读到的状态值
}
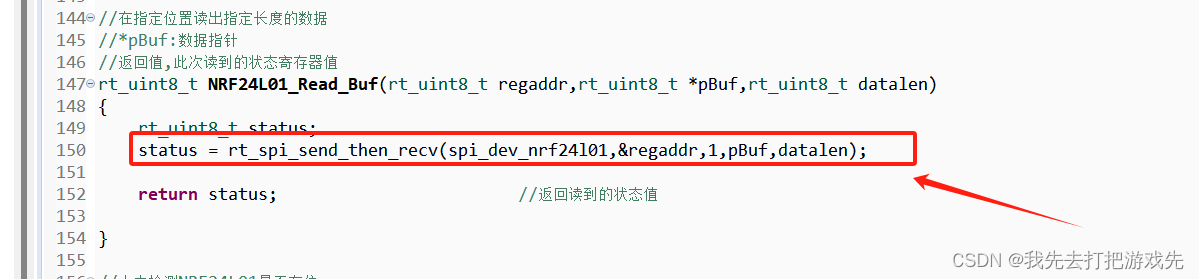
//在指定位置读出指定长度的数据
//*pBuf:数据指针
//返回值,此次读到的状态寄存器值
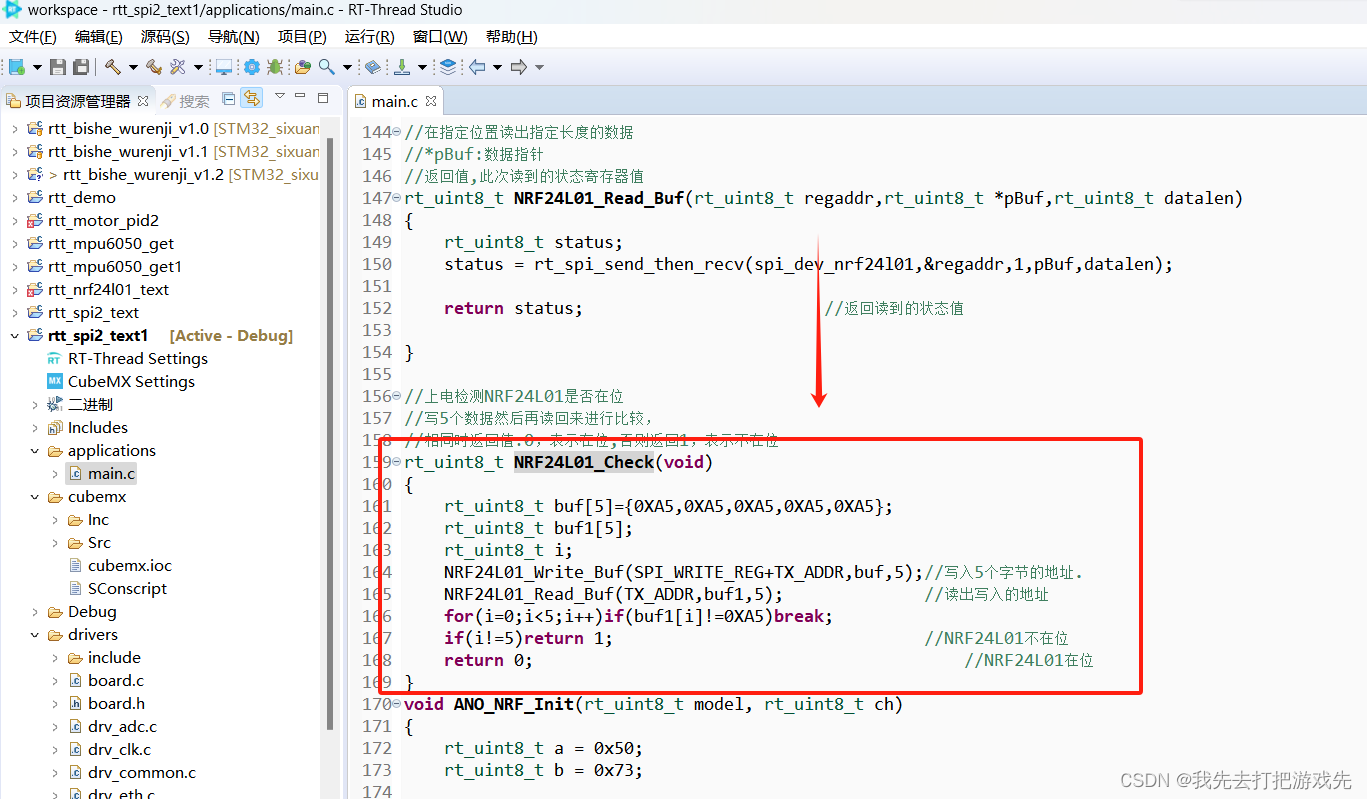
rt_uint8_t NRF24L01_Read_Buf(rt_uint8_t regaddr,rt_uint8_t *pBuf,rt_uint8_t datalen)
{
rt_uint8_t status;
status = rt_spi_send_then_recv(spi_dev_nrf24l01,®addr,1,pBuf,datalen);
return status; //返回读到的状态值
}
//上电检测NRF24L01是否在位
//写5个数据然后再读回来进行比较,
//相同时返回值:0,表示在位;否则返回1,表示不在位
rt_uint8_t NRF24L01_Check(void)
{
rt_uint8_t buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};
rt_uint8_t buf1[5];
rt_uint8_t i;
NRF24L01_Write_Buf(SPI_WRITE_REG+TX_ADDR,buf,5);//写入5个字节的地址.
NRF24L01_Read_Buf(TX_ADDR,buf1,5); //读出写入的地址
for(i=0;i<5;i++)if(buf1[i]!=0XA5)break;
if(i!=5)return 1; //NRF24L01不在位
return 0; //NRF24L01在位
}
void ANO_NRF_Init(rt_uint8_t model, rt_uint8_t ch)
{
rt_uint8_t a = 0x50;
rt_uint8_t b = 0x73;
Clr_NRF24L01_CE;
NRF24L01_Write_Buf(SPI_WRITE_REG+RX_ADDR_P0,(rt_uint8_t*)RX_ADDRESS,RX_ADR_WIDTH); //写RX节点地址
NRF24L01_Write_Buf(SPI_WRITE_REG+TX_ADDR,(rt_uint8_t*)TX_ADDRESS,TX_ADR_WIDTH); //写TX节点地址
NRF24L01_Write_Reg(SPI_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(SPI_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(SPI_WRITE_REG+SETUP_RETR,0x1a); //设置自动重发间隔时间:500us;最大自动重发次数:10次 2M波特率下
NRF24L01_Write_Reg(SPI_WRITE_REG+RF_CH,ch); //设置RF通道为CHANAL
NRF24L01_Write_Reg(SPI_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
if(model==1) //RX
{
NRF24L01_Write_Reg(SPI_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH); //选择通道0的有效数据宽度
NRF24L01_Write_Reg(SPI_WRITE_REG + NCONFIG, 0x0f); // IRQ收发完成中断开启,16位CRC,主接收
}
else if(model==3) //RX2
{
NRF24L01_Write_Reg(FLUSH_TX,0xff);
NRF24L01_Write_Reg(FLUSH_RX,0xff);
NRF24L01_Write_Reg(SPI_WRITE_REG + NCONFIG, 0x0f); // IRQ收发完成中断开启,16位CRC,主接收
rt_spi_send(spi_dev_nrf24l01,&(a),1);
rt_spi_send(spi_dev_nrf24l01,&(b),1);
NRF24L01_Write_Reg(SPI_WRITE_REG+0x1c,0x01);
NRF24L01_Write_Reg(SPI_WRITE_REG+0x1d,0x06);
}
Set_NRF24L01_CE;
}
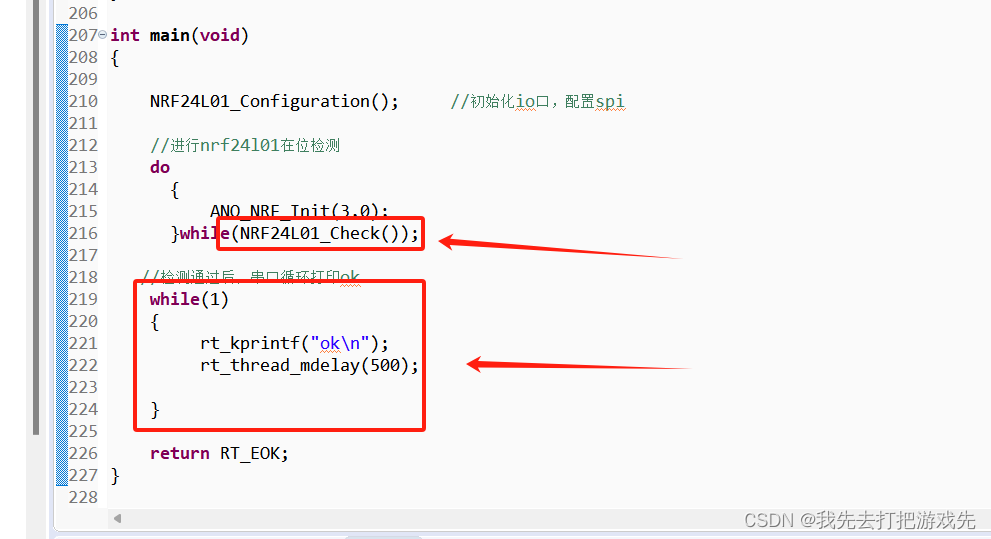
int main(void)
{
NRF24L01_Configuration(); //初始化io口,配置spi
//进行nrf24l01在位检测
do
{
ANO_NRF_Init(3,0);
}while(NRF24L01_Check());
//检测通过后,串口循环打印ok
while(1)
{
rt_kprintf("ok\n");
rt_thread_mdelay(500);
}
return RT_EOK;
}
27、对代码进行一些解释,在主函数里调用NRF24L01_Check()进行模块的在位检测,检测成功后,才能通过do-while循环,进入输出ok的循环,所以如果能够成功输出ok的话,说明SPI配置没问题,能够成功通信。
28、这是在位检测的代码,就是通过SPI向nrf24l01模块中的特定寄存器输入5个一样的值,然后再通过SPI从该寄存器中读出这五个值,如果输入的值和读出的值都一样,说明咱的SPI发送跟接收都没问题
29、还值得一提的是,通过SPI发送数据时,咱调用的是rt_spi_send_then_send()这个RTT官方提供的库函数,这是连续两次发送数据,本函数适合向 SPI 设备中写入一块数据,第一次先发送命令和地址等数据,第二次再发送指定长度的数据。之所以分两次发送而不是合并成一个数据块发送,或调用两次 rt_spi_send(),是因为在大部分的数据写操作中,都需要先发命令和地址,长度一般只有几个字节。如果与后面的数据合并在一起发送,将需要进行内存空间申请和大量的数据搬运。而如果调用两次 rt_spi_send(),那么在发送完命令和地址后,片选会被释放,大部分 SPI 设备都依靠设置片选一次有效为命令的起始,所以片选在发送完命令或地址数据后被释放,则此次操作被丢弃。
30、读取数据时,咱调用的是rt_spi_send_then_recv()这个RTT官方库函数
rt_err_t rt_spi_send_then_recv(struct rt_spi_device *device,
const void *send_buf,
rt_size_t send_length,
void *recv_buf,
rt_size_t recv_length);
此函数发送第一条数据时开始片选,此时忽略接收到的数据,然后发送第二条数据,此时主设备会发送数据 0XFF,接收到的数据保存在 recv_buf 里,函数返回时释放片选。
本函数适合从 SPI 从设备中读取一块数据,第一次会先发送一些命令和地址数据,然后再接收指定长度的数据
31、编译下载后,查看串口,能够成功输出ok,说明spi配置正确,能够跟设备进行正常通讯
文章来源:https://blog.csdn.net/qq_52251819/article/details/135127665
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!