RT-Thread基于AT32单片机的CAN应用
2024-01-10 06:24:55
1 硬件电路

2 RT-Thread驱动配置
RT-Studio中没有CAN相关的图形配置,需要手动修改board.h。在board.h的末尾,增加相关的BSP配置。
#define RT_CAN_USING_HDR
#define BSP_USING_CAN1
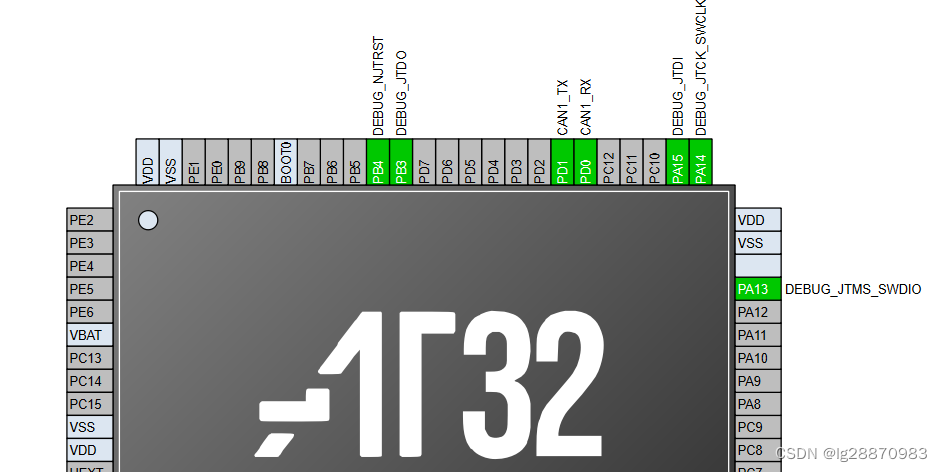
3 IO配置
at32_msp.c中的IO配置是PB9和PB10,掌上实验室V9实际采用的是PD0和PD1,需要修改CAN1相关的IO配置代码。
IO配置代码可以采用AT32_workbench生成,如下图所示。
at32a403a_wk_config.c中找到相关代码,修改RT-Studio中的at32_msp.c的相关代码,如下所示:
void at32_msp_can_init(void *instance)
{
#if defined (BSP_USING_CAN1) || defined (BSP_USING_CAN2)
gpio_init_type gpio_init_struct;
can_type *can_x = (can_type *)instance;
gpio_default_para_init(&gpio_init_struct);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;
#ifdef BSP_USING_CAN1
if(CAN1 == can_x)
{
crm_periph_clock_enable(CRM_CAN1_PERIPH_CLOCK, TRUE);
// crm_periph_clock_enable(CRM_GPIOB_PERIPH_CLOCK, TRUE);
// crm_periph_clock_enable(CRM_IOMUX_PERIPH_CLOCK, TRUE);
//
// gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
// gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
// gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
// gpio_init_struct.gpio_pins = GPIO_PINS_9;
// gpio_init(GPIOB, &gpio_init_struct);
// gpio_pin_remap_config(CAN1_GMUX_0010, TRUE);
//
// gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;
// gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
// gpio_init_struct.gpio_pins = GPIO_PINS_8;
// gpio_init(GPIOB, &gpio_init_struct);
crm_periph_clock_enable(CRM_GPIOD_PERIPH_CLOCK, TRUE);
/* configure the CAN1 TX pin */
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_pins = GPIO_PINS_1;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOD, &gpio_init_struct);
/* configure the CAN1 RX pin */
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;
gpio_init_struct.gpio_pins = GPIO_PINS_0;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init(GPIOD, &gpio_init_struct);
/* GPIO PIN remap */
gpio_pin_remap_config(CAN1_GMUX_0011, TRUE);
}
#endif
#ifdef BSP_USING_CAN2
if(CAN2 == can_x)
{
crm_periph_clock_enable(CRM_CAN2_PERIPH_CLOCK, TRUE);
crm_periph_clock_enable(CRM_GPIOB_PERIPH_CLOCK, TRUE);
crm_periph_clock_enable(CRM_IOMUX_PERIPH_CLOCK, TRUE);
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init_struct.gpio_pins = GPIO_PINS_6;
gpio_init(GPIOB, &gpio_init_struct);
gpio_pin_remap_config(CAN2_GMUX_0001, TRUE);
gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init_struct.gpio_pins = GPIO_PINS_5;
gpio_init(GPIOB, &gpio_init_struct);
}
#endif
#endif
}
void at32_msp_emac_init(void *instance)
{
#if defined (BSP_USING_EMAC)
gpio_init_type gpio_init_struct;
crm_periph_clock_enable(CRM_GPIOA_PERIPH_CLOCK, TRUE);
crm_periph_clock_enable(CRM_GPIOB_PERIPH_CLOCK, TRUE);
crm_periph_clock_enable(CRM_GPIOC_PERIPH_CLOCK, TRUE);
crm_periph_clock_enable(CRM_GPIOD_PERIPH_CLOCK, TRUE);
crm_periph_clock_enable(CRM_IOMUX_PERIPH_CLOCK, TRUE);
gpio_pin_remap_config(EMAC_MUX, TRUE);
gpio_default_para_init(&gpio_init_struct);
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;
gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init_struct.gpio_pins = GPIO_PINS_2;
gpio_init(GPIOA, &gpio_init_struct);
gpio_init_struct.gpio_pins = GPIO_PINS_11 | GPIO_PINS_12 | GPIO_PINS_13;
gpio_init(GPIOB, &gpio_init_struct);
gpio_init_struct.gpio_pins = GPIO_PINS_1;
gpio_init(GPIOC, &gpio_init_struct);
gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init_struct.gpio_pins = GPIO_PINS_1;
gpio_init(GPIOA, &gpio_init_struct);
gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;
gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
gpio_init_struct.gpio_pins = GPIO_PINS_8 | GPIO_PINS_9 | GPIO_PINS_10;
gpio_init(GPIOD, &gpio_init_struct);
#endif
}
4 时钟配置
drv_can.c中给出了can的bitrate配置代码,如下所示:
#ifdef SOC_SERIES_AT32F403A
/* attention !!! baud calculation example: apbclk / ((ss + bs1 + bs2) * brp), ep: 120 / ((1 + 8 + 3) * 10) = 1MHz*/
/* attention !!! default apbclk 120 mhz */
static const struct at32_baud_rate can_baud_rate_tab[] =
{
{CAN1MBaud, {10 , CAN_RSAW_3TQ, CAN_BTS1_8TQ, CAN_BTS2_3TQ}},
{CAN800kBaud, {15 , CAN_RSAW_2TQ, CAN_BTS1_7TQ, CAN_BTS2_2TQ}},
{CAN500kBaud, {20 , CAN_RSAW_2TQ, CAN_BTS1_9TQ, CAN_BTS2_2TQ}},
{CAN250kBaud, {40 , CAN_RSAW_2TQ, CAN_BTS1_9TQ, CAN_BTS2_2TQ}},
{CAN125kBaud, {80 , CAN_RSAW_2TQ, CAN_BTS1_9TQ, CAN_BTS2_2TQ}},
{CAN100kBaud, {75 , CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}},
{CAN50kBaud, {150, CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}},
{CAN20kBaud, {375, CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}},
{CAN10kBaud, {750, CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}}
};
这里要特别注意的是,所有计算是基于apbclk=120MHz。要确认RT-Studio生成的代码的时钟正确,否则需重新配置时钟或修改at32_baud_rate can_baud_rate_tab表格内容。
5 RT-Thread应用示例
#include <rtthread.h>
#include "rtdevice.h"
#ifdef RT_USING_CAN
#define CAN_DEV_NAME "can1" /* CAN 设备名称 */
static struct rt_semaphore rx_sem; /* 用于接收消息的信号量 */
static rt_device_t can_dev; /* CAN 设备句柄 */
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
static rt_thread_t tid1 = RT_NULL;
static volatile int running = 0;
static int data_buf[10];
static uint32_t data_cnt = 0;
rt_err_t lp40_recv(uint16_t id, uint8_t *msg)
{
if(crc_high_first(msg,6)){
}
return RT_EOK;
}
/* 接收数据回调函数 */
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size) {
/* CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void can_rx_thread(void *parameter) {
int i;
//rt_err_t res;
struct rt_can_msg rxmsg = {0};
/* 设置接收回调函数 */
rt_device_set_rx_indicate(can_dev, can_rx_call);
#ifdef RT_CAN_USING_HDR
struct rt_can_filter_item items[5] = {
RT_CAN_FILTER_ITEM_INIT(0x100, 0, 0, 1, 0x700, RT_NULL, RT_NULL), /* std,match ID:0x100~0x1ff,hdr 为 - 1,设置默认过滤表 */
RT_CAN_FILTER_ITEM_INIT(0x300, 0, 0, 1, 0x700, RT_NULL, RT_NULL), /* std,match ID:0x300~0x3ff,hdr 为 - 1 */
RT_CAN_FILTER_ITEM_INIT(0x211, 0, 0, 1, 0x7ff, RT_NULL, RT_NULL), /* std,match ID:0x211,hdr 为 - 1 */
RT_CAN_FILTER_STD_INIT(0x486, RT_NULL, RT_NULL), /* std,match ID:0x486,hdr 为 - 1 */
{0x555, 0, 0, 1, 0x7ff, 7,} /* std,match ID:0x555,hdr 为 7,指定设置 7 号过滤表 */
};
struct rt_can_filter_config cfg = {5, 1, items}; /* 一共有 5 个过滤表 */
/* 设置硬件过滤表 */
res = rt_device_control(can_dev, RT_CAN_CMD_SET_FILTER, &cfg);
RT_ASSERT(res == RT_EOK);
#endif
int rx_count = 0;
while (running) {
/* hdr 值为 - 1,表示直接从 uselist 链表读取数据 */
rxmsg.hdr_index = -1;
/* 阻塞等待接收信号量 */
if(rt_sem_take(&rx_sem, RT_WAITING_FOREVER)==RT_EOK){
/* 从 CAN 读取一帧数据 */
rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));
/* 打印数据 ID 及内容 */
rt_kprintf("recv %ld : id = %d, ide=%d :", ++rx_count, rxmsg.id, rxmsg.ide);
for (i = 0; i < rxmsg.len; i++) {
rt_kprintf(" %02x", rxmsg.data[i]);
}
rt_kprintf("\n");
}
}
}
/* 线程 1 的入口函数 */
static void thread1_entry(void *parameter) {
struct rt_can_msg msg = {0};
int count = 0;
msg.id = 0x123; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
//msg.ide = RT_CAN_EXTID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 8 */
/* 待发送的 8 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = 0x11;
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = 0x44;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
while(running) {
/* 线程 1 采用低优先级运行,一直打印计数值 */
rt_kprintf("send %d : id = %d, ide=%d :", ++count, msg.id, msg.ide);
for(int i=0;i<msg.len;i++)
rt_kprintf(" %02x", msg.data[i]);
rt_kprintf("\n");
rt_device_write(can_dev, 0, &msg, sizeof(msg));
for(int i=0;i<100;i++){
rt_thread_mdelay(50);
if(!running)
break;
}
}
rt_device_close(can_dev);
}
int can_sample(int argc, char *argv[]) {
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2) {
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
} else {
rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);
}
if(running){
rt_kprintf("can_sample is running, stop it before restart!\n can_sample_stop\n", can_name);
return RT_ERROR;
}
/* 查找 CAN 设备 */
can_dev = rt_device_find(can_name);
if (!can_dev) {
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
running = 1;
res = rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
/* 初始化 CAN 接收信号量 */
/* 设置 CAN 的工作模式为正常工作模式 */
res = rt_device_control(can_dev, RT_CAN_CMD_SET_MODE, (void *)RT_CAN_MODE_NORMAL);
//res = rt_device_control(can_dev, RT_CAN_CMD_SET_MODE, (void *)RT_CAN_MODE_LOOPBACK);
res = rt_device_control(can_dev, RT_CAN_CMD_SET_BAUD, (void *)CAN125kBaud);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL) {
rt_thread_startup(thread);
} else {
rt_kprintf("create can_rx thread failed!\n");
}
if (size == 0) {
rt_kprintf("can dev write data failed!\n");
}
/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/
tid1 = rt_thread_create("thread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
else
rt_kprintf("start can send fail\n");
return res;
}
int can_sample_stop(int argc, char *argv[]) {
if(running){
running = 0;
//rt_sem_release(&rx_sem);
rt_sem_detach(&rx_sem);
}
return RT_EOK;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
MSH_CMD_EXPORT(can_sample_stop, can device sample stop);
#endif
文章来源:https://blog.csdn.net/lg28870983/article/details/135459473
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!