强化学习第1天:马尔可夫过程

??主页 Nowl
🔥专栏 《强化学习》
📑君子坐而论道,少年起而行之
??
一、介绍
什么是马尔可夫过程?马尔可夫过程是马尔可夫决策过程的基础,而马尔可夫决策过程便是大部分强化学习任务的抽象过程,本文将从马尔可夫过程开始,一步步带读者理解马尔可夫决策过程
二、马尔可夫过程
1.状态变化过程
我们知道强化学习是一个状态转移的过程,状态发生变化的原因可能取决于当前状态,也可能取决于先前的许多状态,我们把当前状态设为
S
t
S_{t}
St?
则下一个状态的概率与之前所有状态有关可表示为
P
(
S
t
+
1
)
=
P
(
S
t
+
1
∣
S
t
,
.
.
.
,
S
1
)
P(S_{t+1}) = P(S_{t+1}|S_{t},...,S_{1})
P(St+1?)=P(St+1?∣St?,...,S1?)
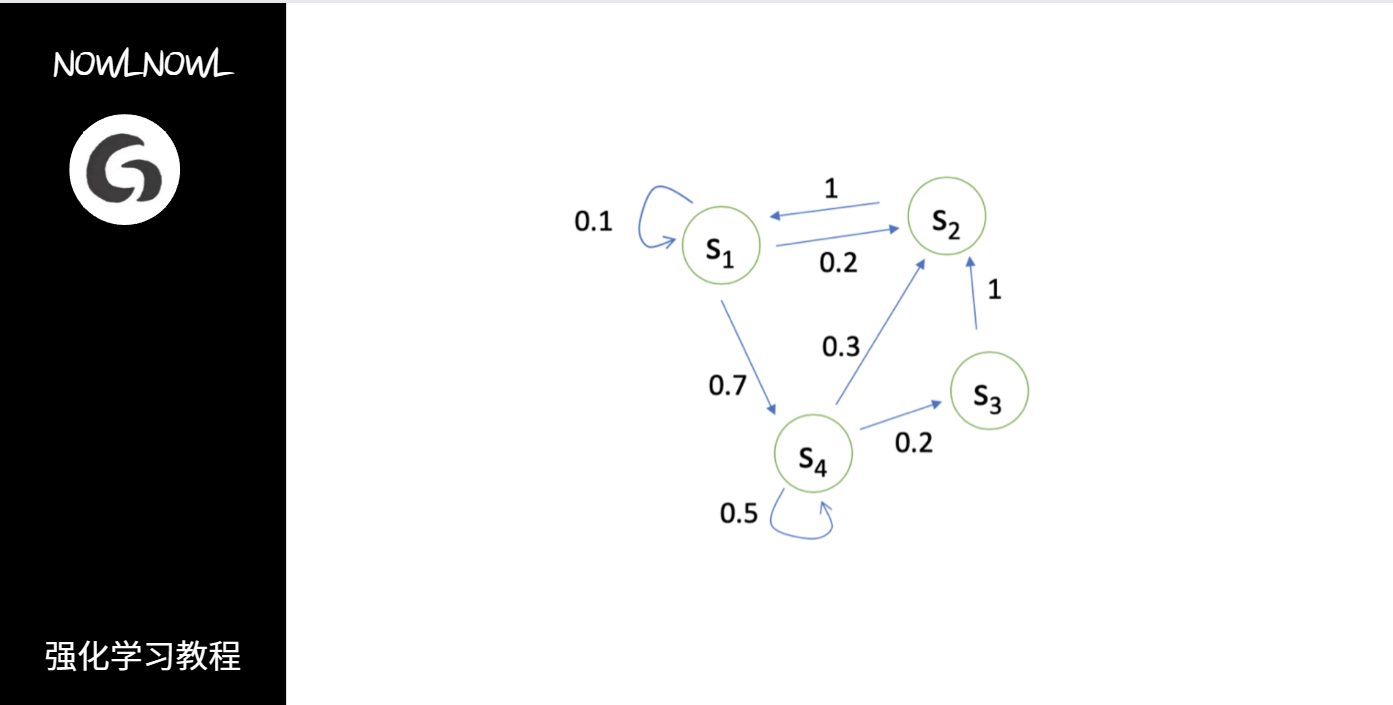
下图为某一个状态变化过程图,箭头表示由某个状态变化到另一个状态的概率
2.马尔可夫性质
当且仅当某时刻的状态只取决于上一时刻的状态时,这个过程就具有马尔可夫性质,即
P
(
S
t
+
1
)
=
P
(
S
t
+
1
∣
S
t
)
P(S_{t+1}) = P(S_{t+1}|S_{t})
P(St+1?)=P(St+1?∣St?)
可以知道,若某过程满足马尔可夫性质,则我们只需要知道当前状态就可以预测下一个状态,而不是要了解之前所有的状态
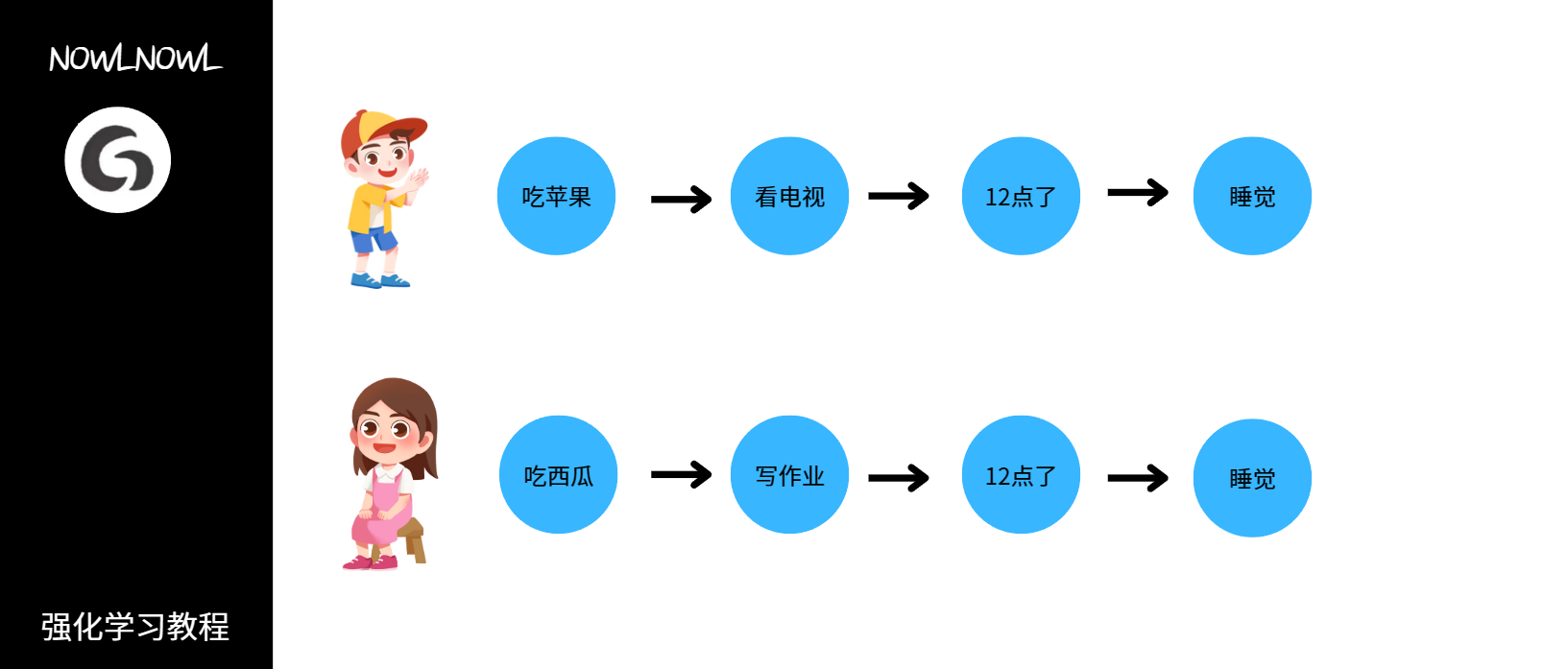
通俗一点可以用下图来说明
无论这两个人之前吃了什么水果,做了什么事,当12点的时候他们都会去睡觉,即睡觉这件事只与12点有关
和之前的行为没有关系
3.马尔可夫过程描述
我们通常用一个元组
<
S
,
P
>
<S,P>
<S,P>
来描述一个马尔可夫过程
- S是有限的状态集合
- P是状态转移矩阵,它记录了状态之间变化的概率
三、马尔可夫奖励过程
1.马尔可夫奖励过程描述
我们知道马尔可夫过程可以由元组<S,P>来描述,那么马尔可夫奖励过程就可以用元组
<
S
,
P
,
r
,
γ
>
<S,P,r,γ>
<S,P,r,γ>
来描述
- r是奖励函数,r(s)即代表转移到状态s可获得的奖励
- γ是折扣因子,取值范围为[0,1),我们将在下文感受到折扣因子的作用
2.回报
在一个马尔可夫奖励过程中,从当前状态开始,到终止状态,所有奖励之和为回报
G
=
R
t
+
γ
R
t
+
1
+
γ
2
R
t
+
2
+
.
.
.
+
γ
k
R
t
+
k
G = R_{t}+γR_{t+1}+γ^{2}R_{t+2}+...+γ^{k}R_{t+k}
G=Rt?+γRt+1?+γ2Rt+2?+...+γkRt+k?
在这里我们可以看到折扣因子的作用了,折扣因子越接近1,就代表模型更注重长期利益,越接近0,就代表模型更注重短期利益
3.价值函数
在马尔可夫奖励过程中,一个状态的期望回报被称为这个状态的价值,价值函数即是以状态为自变量,价值为因变量的函数,定义如下
V
(
s
)
=
E
[
G
t
∣
S
t
=
s
]
V(s)=E[G_{t}|S_{t}=s]
V(s)=E[Gt?∣St?=s]
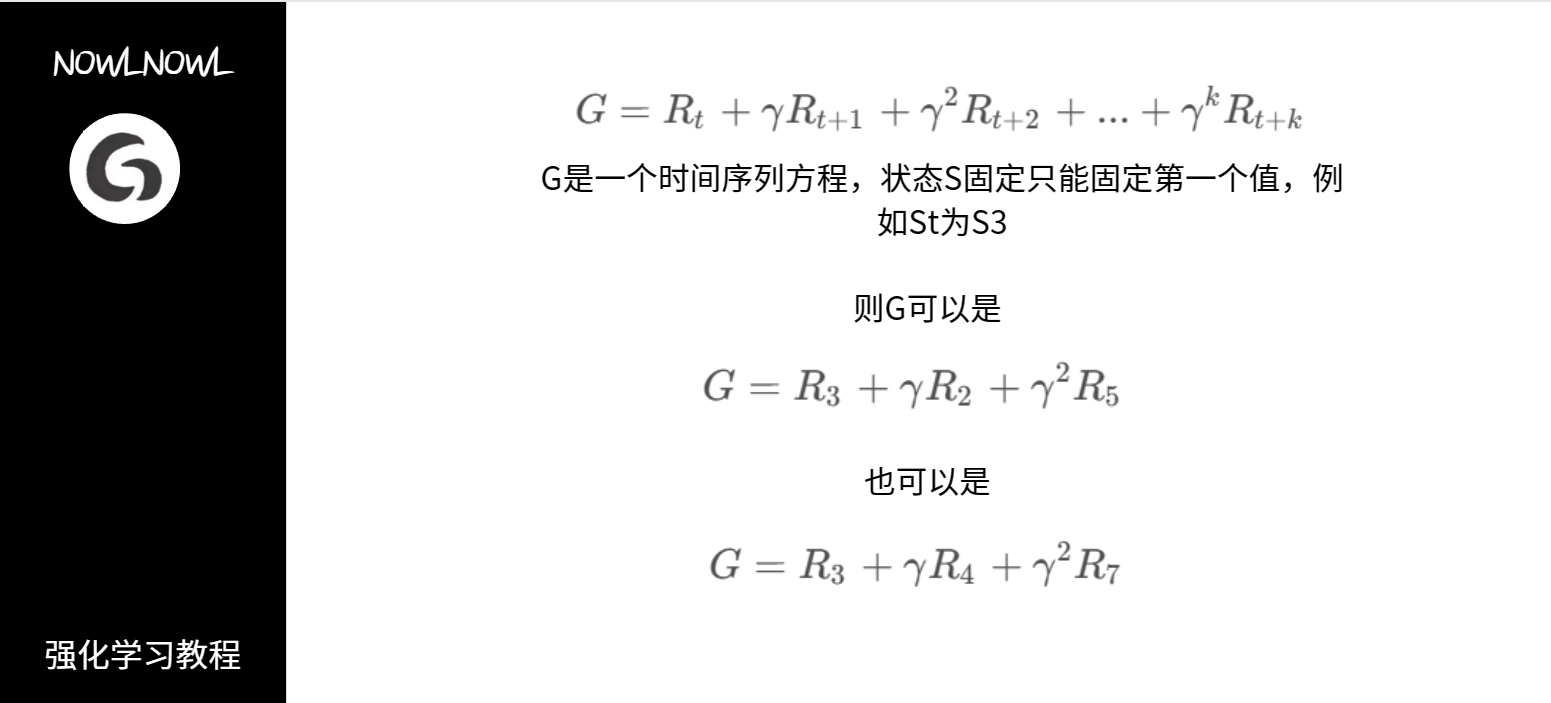
它表示了所有状态回报之和的一种平均,可能这里有些人对这个期望不是很理解,既然我的S固定了,那G不也就固定了吗,为什么还要加上一个期望呢,想到这点的说明有自己的思考了,S确实固定了,这时我们去看G,G这时真的是固定值吗?
理解了价值函数之后,我们接着往下看
4.贝尔曼方程
首先我们给出贝尔曼方程的定义
V
(
s
)
=
r
(
s
)
+
γ
∑
s
′
P
(
s
′
∣
s
)
V
(
s
′
)
V(s)=r(s)+γ\sum_{s^{'}}P(s^{'}|s)V(s^{'})
V(s)=r(s)+γs′∑?P(s′∣s)V(s′)
可以看到左边就是一个价值函数,那是怎么推导过来的呢,看以下过程,我们将价值函数拆开
V
(
s
)
=
E
[
G
t
∣
S
t
=
s
]
V(s)=E[G_{t}|S_{t}=s]
V(s)=E[Gt?∣St?=s]
=
E
[
R
t
+
γ
R
t
+
1
+
γ
2
R
t
+
2
+
.
.
.
∣
S
t
=
s
]
=E[R_{t}+γR_{t+1}+γ^{2}R_{t+2}+...|S_{t}=s]
=E[Rt?+γRt+1?+γ2Rt+2?+...∣St?=s]
=
E
[
R
t
+
γ
(
R
t
+
1
+
γ
R
t
+
2
+
.
.
.
)
∣
S
t
=
s
]
=E[R_{t}+γ(R_{t+1}+γR_{t+2}+...)|S_{t}=s]
=E[Rt?+γ(Rt+1?+γRt+2?+...)∣St?=s]
=
E
[
R
t
+
γ
G
t
+
1
∣
S
t
=
s
]
=E[R_{t}+γG_{t+1}|S_{t}=s]
=E[Rt?+γGt+1?∣St?=s]
=
E
[
R
t
+
γ
V
(
S
t
+
1
)
∣
S
t
=
s
]
=E[R_{t}+γV(S_{t+1})|S_{t}=s]
=E[Rt?+γV(St+1?)∣St?=s]
其中
r
(
s
)
=
E
[
R
t
∣
S
t
=
s
]
r(s)=E[R_{t}|S_{t}=s ]
r(s)=E[Rt?∣St?=s]
而根据条件期望的定义可以得到
γ
∑
s
′
P
(
s
′
∣
s
)
V
(
s
′
)
=
E
[
γ
V
(
S
t
+
1
)
∣
S
t
=
s
]
γ\sum_{s^{'}}P(s^{'}|s)V(s^{'})=E[γV(S_{t+1})|S_{t}=s]
γs′∑?P(s′∣s)V(s′)=E[γV(St+1?)∣St?=s]
即证贝尔曼方程
V
(
s
)
=
r
(
s
)
+
γ
∑
s
′
P
(
s
′
∣
s
)
V
(
s
′
)
V(s)=r(s)+γ\sum_{s^{'}}P(s^{'}|s)V(s^{'})
V(s)=r(s)+γs′∑?P(s′∣s)V(s′)
四、马尔可夫决策过程
1.马尔可夫决策过程描述
我们已经知道了马尔可夫过程和马尔可夫奖励过程(MDP)的描述,接下来我们描述马尔可夫决策过程(MAP),使用元组描述
<
S
,
A
,
P
,
r
,
γ
>
<S,A,P,r,γ>
<S,A,P,r,γ>
- A是动作,这时多出来的东西可不只有动作,还有抉择做什么动作的策略
- 此时r(s)变为了r(s,a),因为奖励此时不仅与状态有关,还与动作有关
- 同理,P也与动作联系起来了,因此它不再是一个二维数组矩阵,而是变成了一个三维矩阵
在描述马尔可夫决策过程的元组中,我们发现了许多强化学习中的元素:状态,奖励,动作,可以看到我们逐渐与我们的目的——强化学习越来越近了!
由于新加入的动作因子所产生的策略因子,我们优化一下价值函数变为状态价值函数
V
π
(
s
)
=
E
π
[
G
t
∣
S
t
=
s
]
V^{\pi}(s)=E_{\pi}[G_{t}|S_{t}=s]
Vπ(s)=Eπ?[Gt?∣St?=s]
我们把π定义为策略,则更新后的价值函数可以这样描述:从状态s出发遵循策略π可以获得的期望回报
定义好了状态价值函数,我们再来定义动作价值函数,动作价值函数是遵循策略π时,在当前状态下采取动作a能得到的期望回报
Q
π
(
s
,
a
)
=
E
π
[
G
t
∣
S
t
=
s
,
A
t
=
a
]
Q^{\pi}(s,a)=E_{\pi}[G_{t}|S_{t}=s,A_{t}=a]
Qπ(s,a)=Eπ?[Gt?∣St?=s,At?=a]
我们直观理解一下
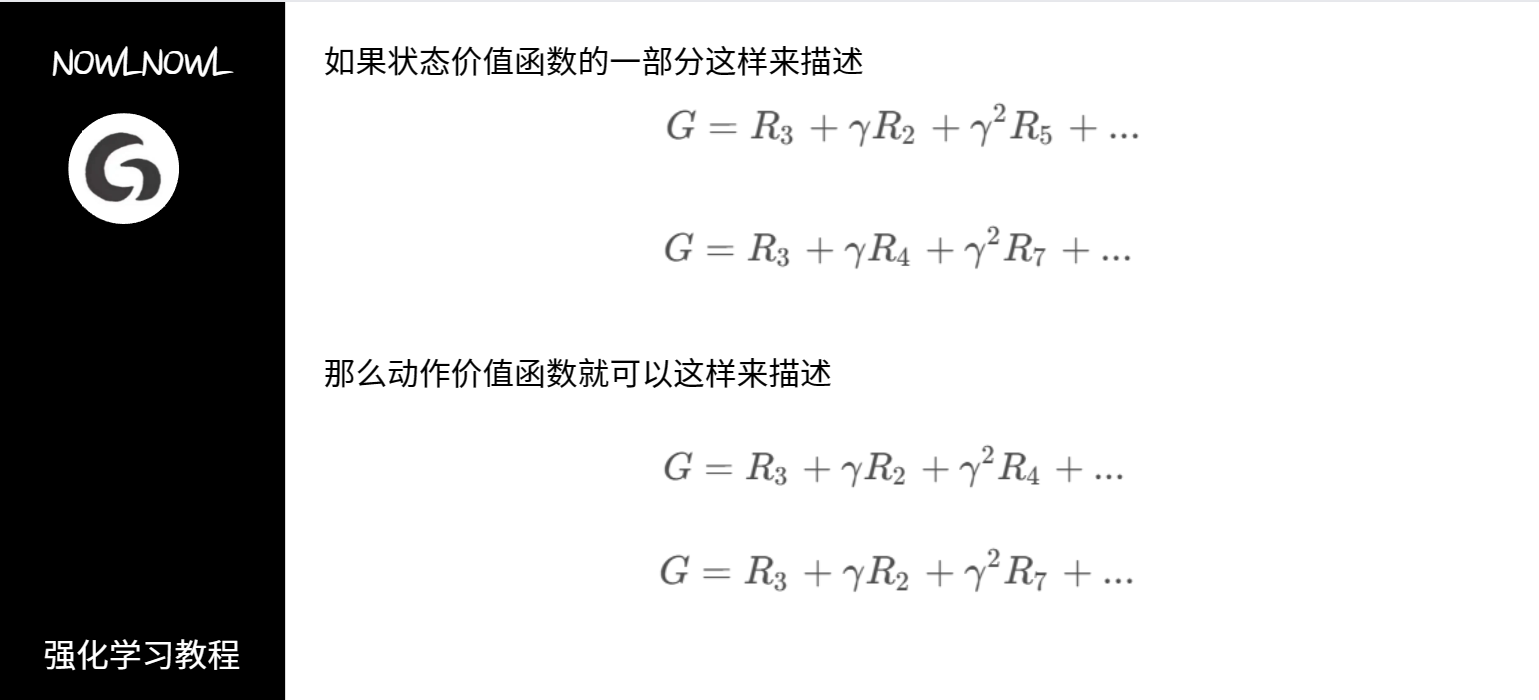
发现了其中的区别了吗,状态价值函数的第一个状态是固定的,而动作价值函数的第一,第二个状态都是固定的,回到定义,因为动作价值函数规定了当前状态所做出的动作,所以第二个状态也是固定的
所以状态价值函数与动作价值函数的联系公式如下
V
π
(
s
)
=
∑
a
π
(
a
∣
s
)
Q
π
(
s
,
a
)
V^{\pi}(s)=\sum_{a}\pi(a|s)Q^{\pi}(s,a)
Vπ(s)=a∑?π(a∣s)Qπ(s,a)
展开动作价值函数的贝尔曼方程如下
Q
π
(
s
,
a
)
=
r
(
s
,
a
)
+
γ
∑
s
′
P
(
s
′
∣
s
,
a
)
V
π
(
s
′
)
Q^{\pi}(s,a)=r(s,a)+γ\sum_{s^{'}}P(s^{'}|s,a)V^{\pi}(s^{'})
Qπ(s,a)=r(s,a)+γs′∑?P(s′∣s,a)Vπ(s′)
2.贝尔曼期望方程
动作价值函数贝尔曼期望方程
Q
π
(
s
,
a
)
=
E
π
[
R
t
+
γ
Q
π
(
s
′
,
a
′
)
∣
S
t
=
s
,
A
t
=
a
]
Q^{\pi}(s,a)=E_{\pi}[R_{t}+γQ^{\pi}(s^{'},a^{'})|S_{t}=s,A_{t}=a]
Qπ(s,a)=Eπ?[Rt?+γQπ(s′,a′)∣St?=s,At?=a]
=
r
(
s
,
a
)
+
γ
∑
s
′
P
(
s
′
∣
s
,
a
)
∑
a
′
π
(
a
′
∣
s
)
Q
π
(
s
′
,
a
′
)
=r(s,a)+γ\sum_{s^{'}}P(s^{'}|s,a)\sum_{a^{'}}\pi(a^{'}|s)Q^{\pi}(s^{'},a^{'})
=r(s,a)+γs′∑?P(s′∣s,a)a′∑?π(a′∣s)Qπ(s′,a′)
状态价值函数贝尔曼期望方程
V
π
(
s
)
=
E
π
[
R
t
+
γ
V
π
(
s
′
)
∣
S
t
=
s
]
V^{\pi}(s)=E_{\pi}[R_{t}+γV^{\pi}(s^{'})|S_{t}=s]
Vπ(s)=Eπ?[Rt?+γVπ(s′)∣St?=s]
=
∑
a
π
(
a
∣
s
)
{
r
(
s
,
a
)
+
γ
∑
s
′
P
(
s
′
∣
s
,
a
)
V
π
(
s
′
)
}
=\sum_{a}\pi(a|s)\{r(s,a)+γ\sum_{s^{'}}P(s^{'}|s,a)V^{\pi}(s^{'})\}
=a∑?π(a∣s){r(s,a)+γs′∑?P(s′∣s,a)Vπ(s′)}
贝尔曼方程是强化学习中很重要的部分,之后很多方法都是由此推导而来,请一定好好理解并尝试推导
五、蒙特卡洛方法
1.介绍
蒙特卡洛方法的思想来自于概率论与数理统计,主要步骤是先进行重复随机抽样,然后运用概率统计方法来获得我们想要的数值特征
如下是一个简单的例子,使用蒙特卡洛方法求圆的面积,我们已知三角形的面积,则先随机选取多个点,然后就可以通过比例计算出圆形的面积

2.在强化学习中的应用
那么如何在强化学习中应用蒙特卡洛方法呢,我们试着求状态价值,我们知道状态价值是状态的期望回报,这个回报由许多条序列计算而来,那我们就可以选取多条序列,将通过选取的序列所算出来的期望回报近似为真正的状态价值
V
π
(
s
)
=
E
π
[
G
t
∣
S
t
=
s
]
≈
1
N
∑
i
N
G
t
(
i
)
V^{\pi}(s)=E_{\pi}[G_{t}|S_{t}=s]\approx\frac{1}{N}\sum^{N}_{i}G_{t}^{(i)}
Vπ(s)=Eπ?[Gt?∣St?=s]≈N1?i∑N?Gt(i)?
根据大数定律可以知道,当选取的序列够多时,这两个值就越近似
3.为什么要使用蒙特卡洛方法
我们要明白,虽然我们知道了求解期望的公式,但在真实情况中,很多条件是不知道的,例如不清楚某个状态的所有序列,这时我们就只能使用蒙特卡洛方法来通过局部估计总体了
最优策略
作了这么多基础铺垫,再回到强化学习上来吧,强化学习的目标就是找到一个策略,来获得最高的期望回报,从初始状态出发到达最终目的可能有很多策略,但很容易知道,一定有一个策略,得到的期望不低于其他所有策略,这个策略就是最优策略,找到它就是强化学习的目标
我们将最优策略表示为
π
?
(
s
)
\pi^{*}(s)
π?(s)
再定义最优状态价值函数
V
?
(
s
)
=
m
a
x
π
V
π
(
s
)
V^{*}(s)=max_{\pi}V^{\pi}(s)
V?(s)=maxπ?Vπ(s)
和最优动作价值函数
Q
?
(
s
,
a
)
=
m
a
x
π
Q
π
(
s
,
a
)
Q^{*}(s,a)=max_{\pi}Q^{\pi}(s,a)
Q?(s,a)=maxπ?Qπ(s,a)
贝尔曼最优方程
前文介绍了最重要的贝尔曼方程,这里给出它的最优形式
Q
?
(
s
,
a
)
=
r
(
s
,
a
)
+
γ
∑
s
′
P
(
s
′
∣
s
,
a
)
m
a
x
a
′
Q
?
(
s
′
,
a
′
)
Q^{*}(s,a)=r(s,a)+γ\sum_{s^{'}}P(s^{'}|s,a)max_{a^{'}}Q^{*}(s^{'},a^{'})
Q?(s,a)=r(s,a)+γs′∑?P(s′∣s,a)maxa′?Q?(s′,a′)
V
?
(
s
)
=
m
a
x
a
(
r
(
s
,
a
)
+
γ
∑
s
′
P
(
s
′
∣
s
,
a
)
V
?
(
s
′
)
)
V^{*}(s)=max_{a}(r(s,a)+γ\sum_{s^{'}}P(s^{'}|s,a)V^{*}(s^{'}))
V?(s)=maxa?(r(s,a)+γs′∑?P(s′∣s,a)V?(s′))

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!