一起玩儿物联网人工智能小车(ESP32)——23. 变量与函数(一)
摘要:本文介绍变量和函数的基本知识
经过一个阶段的学习,大家对程序开发也有了一个初步的了解。这只能说是刚刚开始,所能实现的功能还非常的有限。接下来就是拓展一下大家的基本开发技能。
在前面的开发中,大家如果认真的练习并且实现了小车朝各个方向移动,那么一定会发现一个问题,程序中会有很多很类似的东西,这是实现向前运动的Mixly功能图,如下图所示:

那么在实现向后运动的功能时,还需要把这些功能再一一调用一下,而其中只需要把的管脚号变一下就行了。没实现一种运动,就要写这一组的功能组合,会造成巨大的重复工作,那么怎么解决这个问题呢?这就必须要用到软件开发中两个非常重要的概念了——变量和函数,下面先来了解一下什么是变量。
在前面的功能配置中,每一个数字输出功能的管脚号码都是固定的,是不会改变的,这个数据量就是常量,那么如果想让这个数据可以变化,就用到了变量。变量是指存储和描述数据的一个名字或者标识,是程序设计语言中一个非常重要的概念。说得通俗一点儿,就是给数据起一个名字,以后通过这个名字来代表这个数据,然后这个数据是可以变化的。这个名字也称作标识符。
不同编程语言的标识标识符的命名规则是不完全一样的。但通常需要满足如下规则:
- 标识符必须以字母或者下划线开头,其他可以是数字、字母、下划线。
- 大部分编程语言是区分大小写的,也就是大小写字母的标识符不同,但也有一些编程语言不区分大小写。常用的C/C++、Python都是区分大小写的,也就是大小写意义不同。
- 标识符是有长度限制的,通常超出限制的字符会被忽略。C语言的标识符的有效长度是31个字符。
- 另外就是各种编程语言都有一些具有特殊意义的字符串(我们称之为保留的关键字),是不能用作变量名称的。
在C/C++语言中,变量还要有明确的类型和范围。比如这个变量是整数,那么这个变量就只能代表某个整数,不能有小数。而范围通常是受存储空间的限制,一个字节的整数,那么最大就是255,10个字节的字符串,最多能存储10个字符。
C语言中的数据类型主要分为以下几类:基本类型、指针类型、数组类型、结构类型、联合类型和枚举类型。
基本类型是C语言中最简单的数据类型,包括整型、实型和字符型。
a.整型:整型变量用于存储整数,包括int、short、long。
b.实型:用于存储浮点数,也就是可以存储带小数位的数据,包括float和double。
c.字符型:用于存储字符,包括char。
这里就先了解一下基本类型,其他那些类型在后边接触的时候,再慢慢讲解。
一个变量在创建的时候,最好给设置一下初值,也就是这个变量的初始值。如果没有指定初始值,那么有些编程语言会设置默认值,还有些编程语言不会进行任何设置,那么这个变量的值可能就是一个随机值,取决于给他分配的内存空间当时的状况。所有,给每个变量设置一个初始值,是一个非常好的习惯。
下面就来用Mixly生成v1和v2变量,其中v1变量为整形,初始值为100。V2变量为浮点数,其初始值为2.5。声明变量的功能在“变量”功能模块,而给变量赋初值的功能在“数学”功能模块。设置完成后如下图所示:
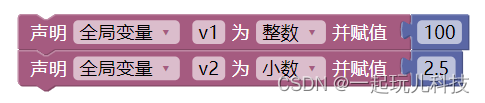
在声明变量的时候,有两种类型,一种是全局变量,一种是局部变量。在这里,全局变量是指在整个程序的任意位置都能访问这个变量,而局部变量则只在某个局部的范围内可以访问此变量。那有人就会问了,全局变量这么方便,为啥不全用全局变量呢?一方面是全局变量自始至终都要占据内存空间,在当初内存空间有限的年代,一点点的内存都显得尤为的重要。局部变量在使用时才分配内存空间,使用结束,内存就释放了,可以给其他的变量再使用,因此占用空间更小。另一个原因是,全局变量在程序的任何地方都可以使用和修改,这是一把双刃剑,方便的同时,会有隐含的问题,有可能由于程序问题或者其他原因,导致了变量值被意外修改,这将给程序的正确运行带来不小的影响。
因此,对于复杂的程序,一定要尽量控制变量的适用范围,让其只在必要的部分生效。下面看一下上面两个功能生成了怎样的代码吧,代码如下所示:
| volatile int v1; volatile float v2; void setup(){ ??v1 = 100; ??v2 = 2.5; } void loop(){ } |
在代码中可以看到,首先声明了int和float类型的两个变量。然后又分别设置了初始值。
声明了变量该如何使用呢?接下来假设声明一个名称为pin的变量,代表GPIO的一个管脚,设置的初值为30,接下来将pin所指定的管脚输出为高电平。然后再将pin改变为32,最后再将pin指定的管脚输出为低电平。如下图所示:

这样就分别完成了为管脚30输出高电平、管脚32输出低电平的工作了。接下来看一下C语言的源代码:
| volatile unsigned int pin; void setup(){ ??pin = 30; } void loop(){ ??pinMode(pin, OUTPUT); ??digitalWrite(pin,HIGH); ??pin = 32; ??pinMode(pin, OUTPUT); ??digitalWrite(pin,LOW); } |
通过上面的源代码可以看出,同样的两句代码,却分别实现了对不同GPIO管脚的输出控制。
接下来会讲解如何利用函数,增加代码的复用,减少开发中的重复劳动。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!