ros2 humble安装joint_state_publisher功能包
2023-12-21 17:11:51
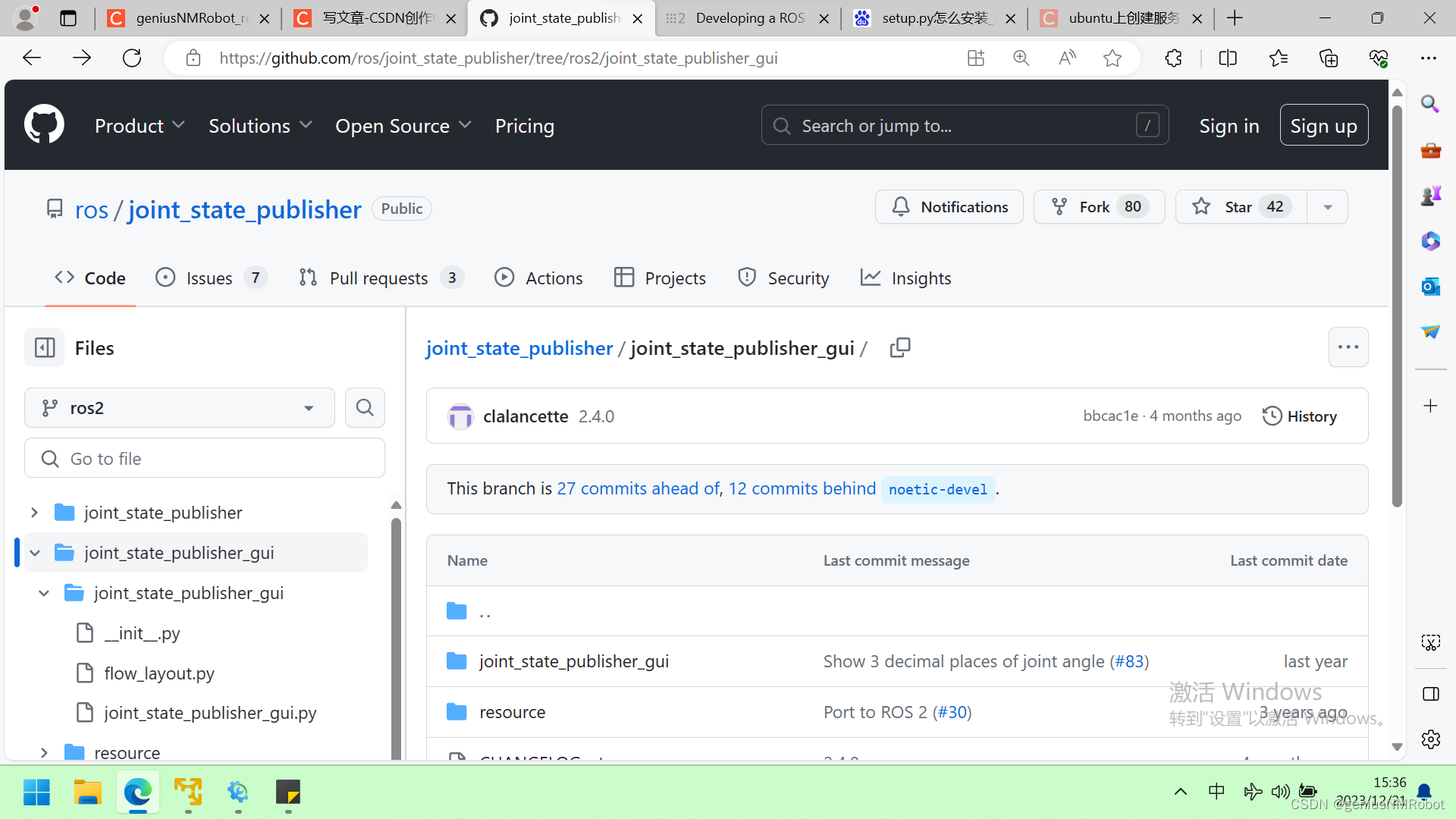
?第一步从GitHub下载此功能包:命令
git clone -b ros2 https://github.com/ros/joint_state_publisher.git然后执行里面的setup.py文件就完成安装;命令是
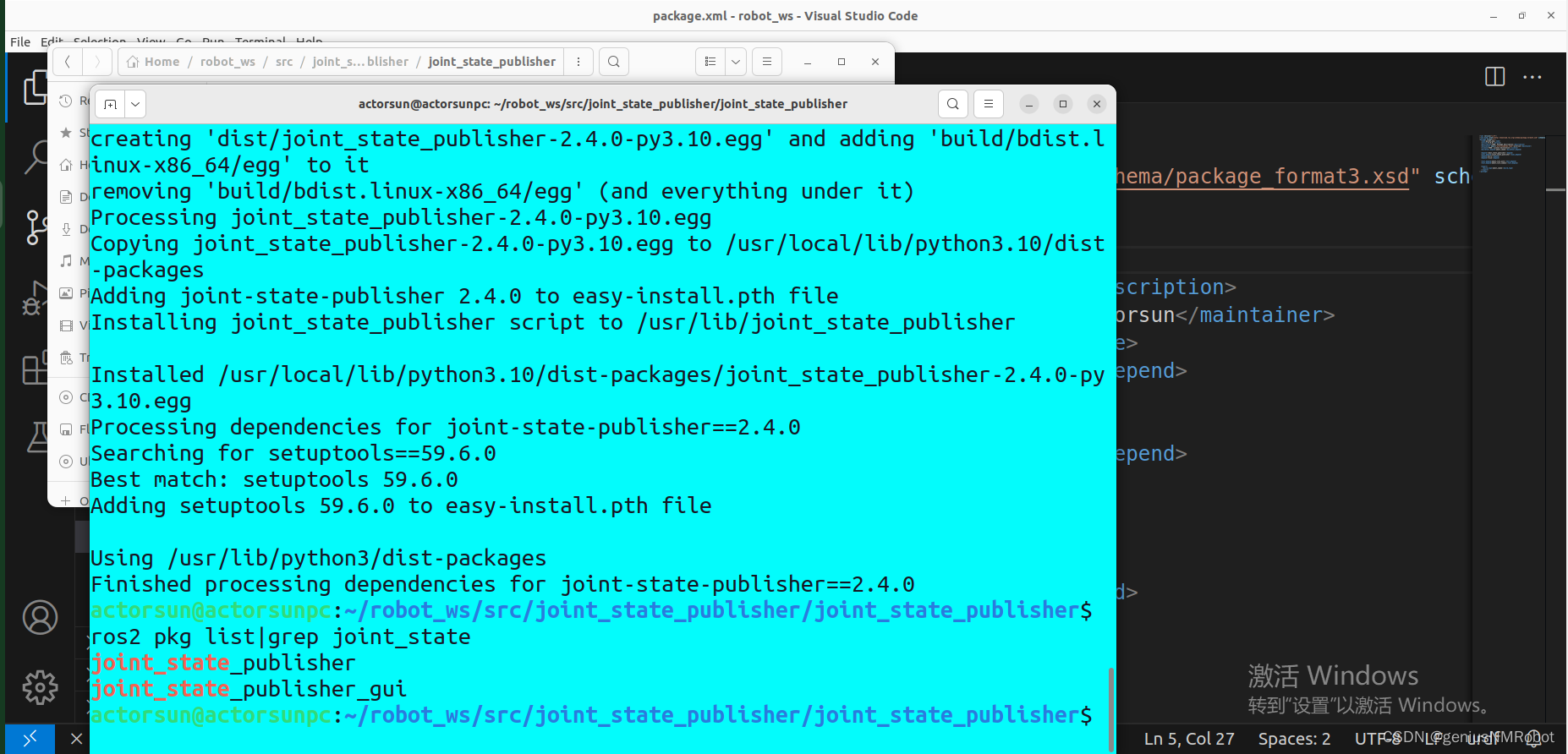
sudo python setup.py install最后检查是不是有安装好,输入命令:
ros2 pkg list|grep joint_state_publisher如果显示出有这个包就是安装好了:

/
其实还可以这样做:sudo apt install ros-ros版本-包名称
例如:sudo apt install ros-humble-robot-state-publisher
sudo apt install ros-noitic-joint-state-publisher就可以了。
这是一种通用的为ros安装软件包的方法
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135132435
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!