Ubuntu-Sim2Real环境配置(下)
2023-12-13 06:54:58
cd ICRA-RM-Sim2Real/docker_client/
./exec_client.sh
cd ~
roslaunch rtab_navigation rtab_navigation.launch执行上面代码的时候后台一直刷新
cd ICRA-RM-Sim2Real/docker_client/
./exec_client.sh
cd ~
roslaunch carto_navigation navigation.launch?1.Usage
执行该代码的时候出现了下面的问题
使用下面代码打开bashrc文件
nano ~/.bashrc将最后的下面的代码
# enable programmable completion features (you don't need to enable
# this, if it's already enabled in /etc/bash.bashrc and /etc/profile
# sources /etc/bash.bashrc).
if ! shopt -oq posix; then
if [ -f /usr/share/bash-completion/bash_completion ]; then
. /usr/share/bash-completion/bash_completion
elif [ -f /etc/bash_completion ]; then
. /etc/bash_completion
fi
fi
# >>> fishros initialize >>>
source /opt/ros/noetic/setup.bash
# <<< fishros initialize <<<
# >>> fishros scripts >>>
export PATH=$PATH:/home/see/.fishros/bin/
# <<< fishros scripts <<<
改为
# enable programmable completion features (you don't need to enable
# this, if it's already enabled in /etc/bash.bashrc and /etc/profile
# sources /etc/bash.bashrc).
if ! shopt -oq posix; then
if [ -f /usr/share/bash-completion/bash_completion ]; then
. /usr/share/bash-completion/bash_completion
elif [ -f /etc/bash_completion ]; then
. /etc/bash_completion
fi
fi
source /opt/ros/kinetic/setup.bash
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:/home/sz/catkin_ws/src
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
#source ~/racecar/devel/setup.bash
不过当我重新跑代码的时候,变成了这样,我的rviz黑屏了

副了,所以我把前面的一步撤回,查看
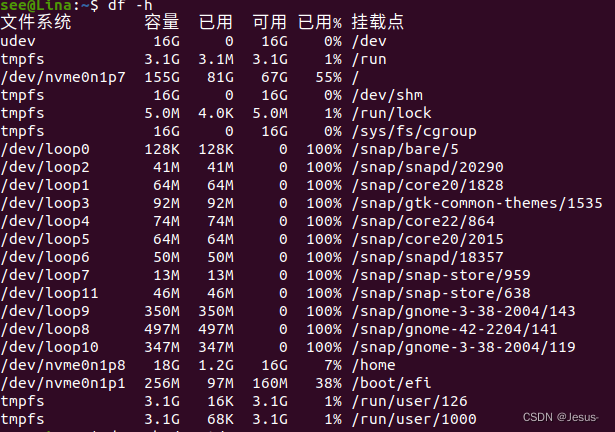
参考下面的博客,但是学长劝我别删除,所以我没管
https://wenku.csdn.net/answer/8fc926b10bb8df864ba9fc7ffde92f4b
?Ubuntu虚拟机删除dev/loop_sudo apt autoremove --purge snapd-CSDN博客
配置下面代码的时候
cd ICRA-RM-Sim2Real/docker_client/
./exec_client.sh
roscd ep_detect_and_grasp
python3 detect_cube.py出现了这个问题
(frame:406): Gdk-ERROR **: 05:10:35.111: The program 'frame' received an X Window System error.
This probably reflects a bug in the program.
The error was 'BadAccess (attempt to access private resource denied)'.
(Details: serial 295 error_code 10 request_code 130 (MIT-SHM) minor_code 1)
(Note to programmers: normally, X errors are reported asynchronously;
that is, you will receive the error a while after causing it.
To debug your program, run it with the GDK_SYNCHRONIZE environment
variable to change this behavior. You can then get a meaningful
backtrace from your debugger if you break on the gdk_x_error() function.)
Trace/breakpoint trap (core dumped)
?
detect_cube.py:29: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.aruco_pose_pub = rospy.Publisher("aruco_pose", Pose)
detect_cube.py:31: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.aruco_sink1_pub = rospy.Publisher("aruco_sink1", Pose)
detect_cube.py:32: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.aruco_sink2_pub = rospy.Publisher("aruco_sink2", Pose)
detect_cube.py:33: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.aruco_sink3_pub = rospy.Publisher("aruco_sink3", Pose)
detect_cube.py:35: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.aruco_pose_image_pub = rospy.Publisher("aruco_pose_image", Image)
(50, 50)
(50, 50)
(50, 50)
(50, 50)
(50, 50)
(50, 50)
不过在我重复三次执行后,它可以调出frame画面,就是好像和指导书的不太一样就是了,无法操控它
运行下面代码的时候
cd ICRA-RM-Sim2Real/docker_client/
./exec_client.sh
roscd ep_detect_and_grasp
python3 grasp_cube.py出现了这个问题
The publisher should be created with an explicit keyword argument 'queue_size'.根据提示输入下面代码 注意括号前面有反斜杠 '\'
self.base_move_position_pub = rospy.Publisher\("cmd_position", Twist\)出现下面的问题:
bash: self.base_move_position_pub: command not found?查看链接
rospy/Overview/Publishers and Subscribers - ROS Wiki
再次运行下面的代码的时候
cd ICRA-RM-Sim2Real/docker_client/
./exec_client.sh
roscd ep_detect_and_grasp
python3 grasp_cube.py虽然能出现一个frame窗口,但是有下面的信息提示:
 ?
?
文章来源:https://blog.csdn.net/m0_74081875/article/details/134816664
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!