小车项目1:让小车动起来
2024-01-02 13:31:19

?1、小车底盘组装
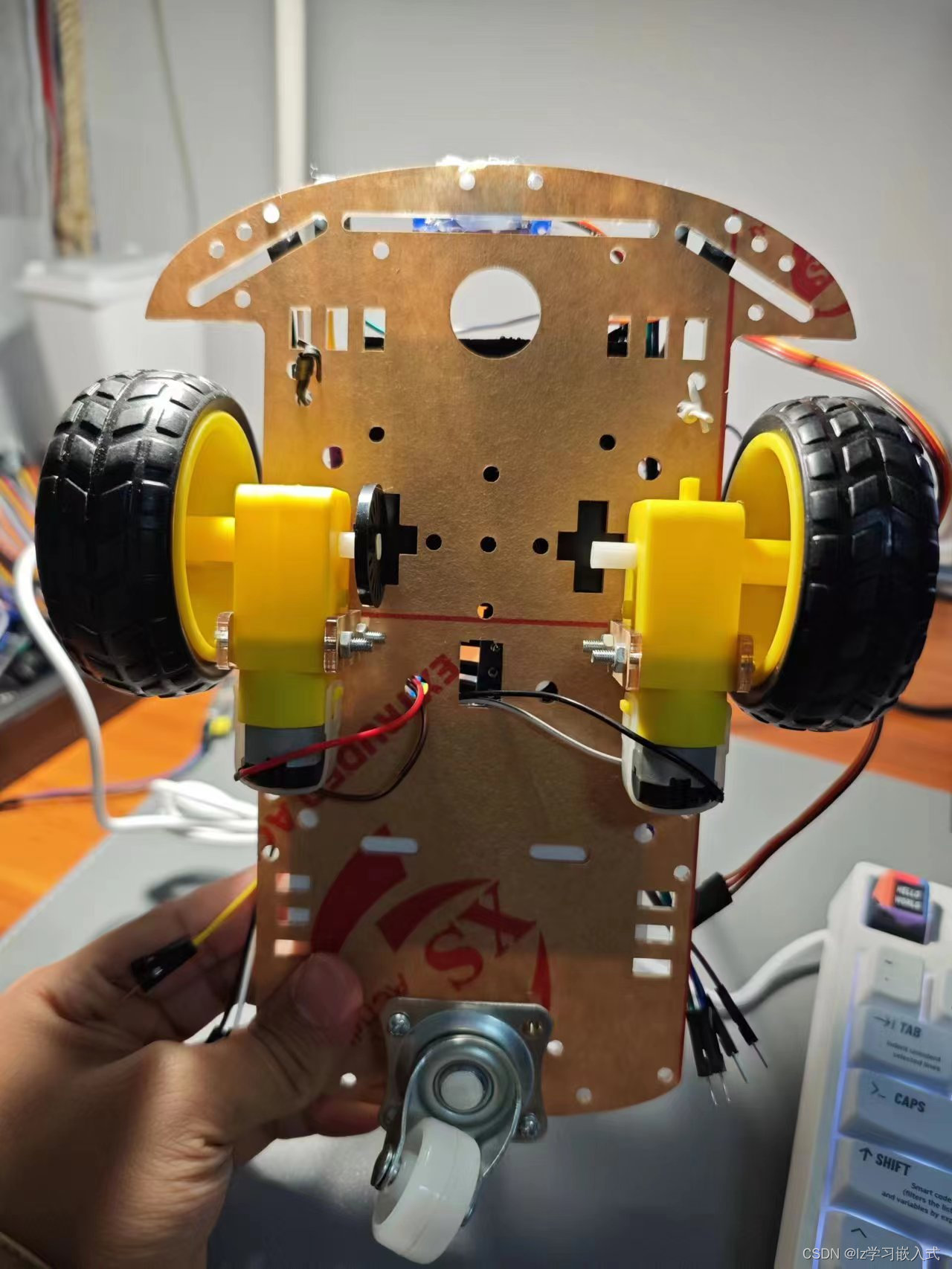
?2、电机模块开发
L9110s概述 ?
????????L9110S是一块直流电机驱动电路,该产品为电池供电的玩具、低压或电池供电的控制应用提供了 一种集成直流马达驱动的解决方案。电路内部集成了采用MOS管设计的H桥驱动电路,主要应用于驱 动通用直流电机。
接通VCC,GND 模块电源指示灯亮?

?
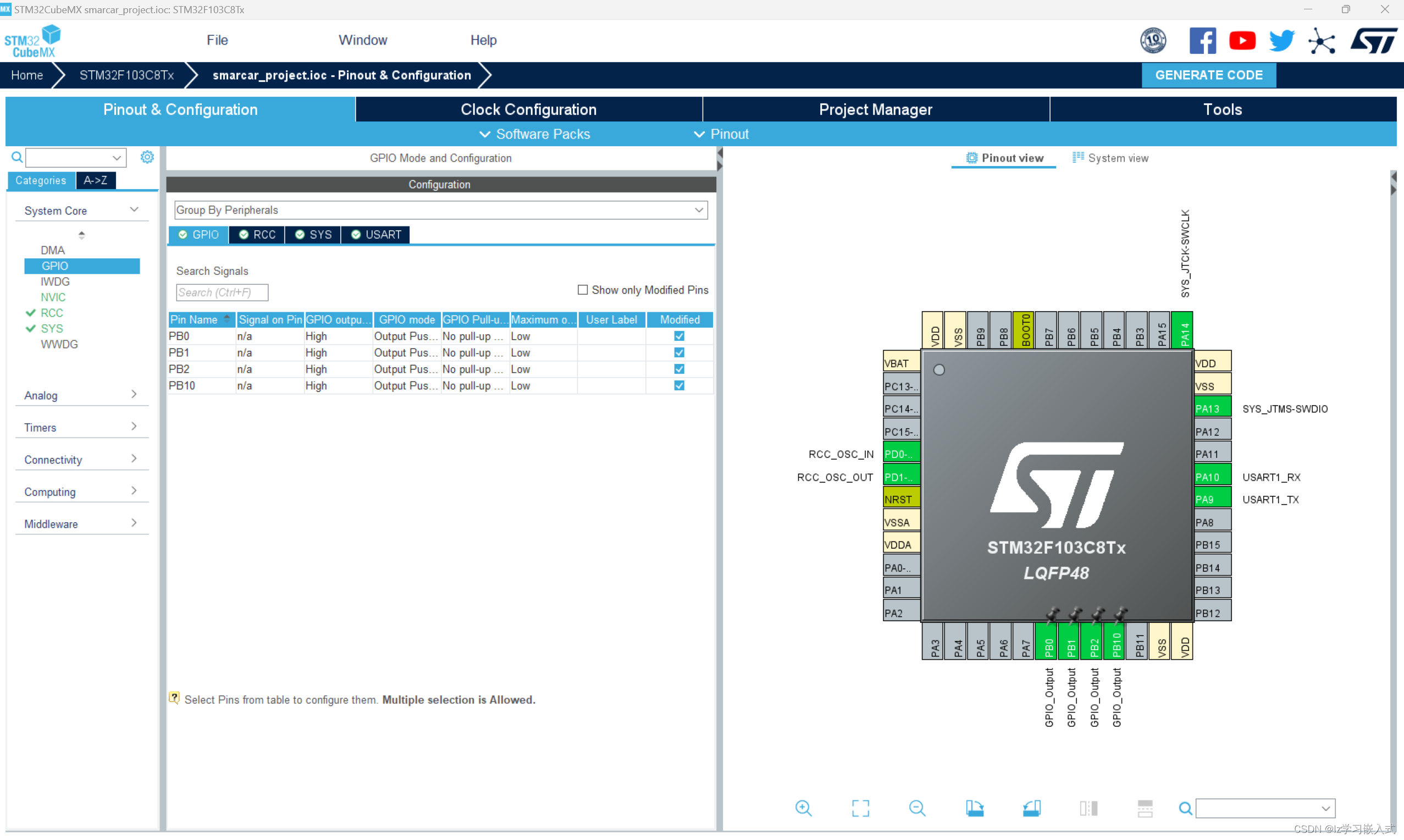
硬件接线
B-1A -- PB10
B-1B -- PB2
A-1A -- PB1
A-1B -- PB0
左轮向前?
B0 高电平 B1低电平
右轮向前?
B2 高电平 B10 低电
左轮向后
?B0 低电平 B1高电平
右轮向后?
B2 低电平 B10 高电平
3、代码实现及cubeMX配置
main.c?
循环:前进一秒,后退一秒,左转一秒,右转一秒,停止一秒。
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include "motor.h"
#include "string.h"
#include <stdio.h>
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, &buf, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
goForward();
HAL_Delay(1000);
goBack();
HAL_Delay(1000);
goLeft();
HAL_Delay(1000);
goRight();
HAL_Delay(1000);
stop();
HAL_Delay(1000);
}
/* USER CODE END 3 */
}motor.c
#include "motor.h"
#include "gpio.h"
void goForward(void)
{
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
void goBack(void)
{
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET);
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_SET);
}
void goLeft(void)
{
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
void goRight(void)
{
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
void stop(void)
{
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
void goForward(void);
void goBack(void);
void goLeft(void);
void goRight(void);
void stop(void);
#endif /*__MOTOR_H__*/
4、小车视频
小车前后左右
文章来源:https://blog.csdn.net/qq_61391875/article/details/135333739
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!