Anchor-based目标检测算法
2023-12-24 12:43:59
Anchor-based目标检测算法是一类利用预定义锚框(anchor boxes)进行目标检测的算法。这些锚框在图像中覆盖不同尺度和宽高比例的区域,用于生成候选目标框。以下是一些主要的anchor-based目标检测算法:
- Faster R-CNN (Region-based Convolutional Neural Network):
- 算法简介: Faster R-CNN是一种经典的目标检测框架,引入了RPN(Region Proposal Network)作为锚框生成器。
- 特点: RPN负责生成候选框,后续的Fast R-CNN负责对这些框进行分类和精确定位。
- 论文: "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks" (2015)
- YOLO (You Only Look Once):
- 算法简介: YOLO是一种实时目标检测算法,将目标检测问题转化为回归问题,直接在整个图像上预测目标框和类别概率。
- 特点: YOLO不使用锚框,而是将图像划分为网格,每个网格负责预测目标框。
- 论文: "You Only Look Once: Unified, Real-Time Object Detection" (2016)
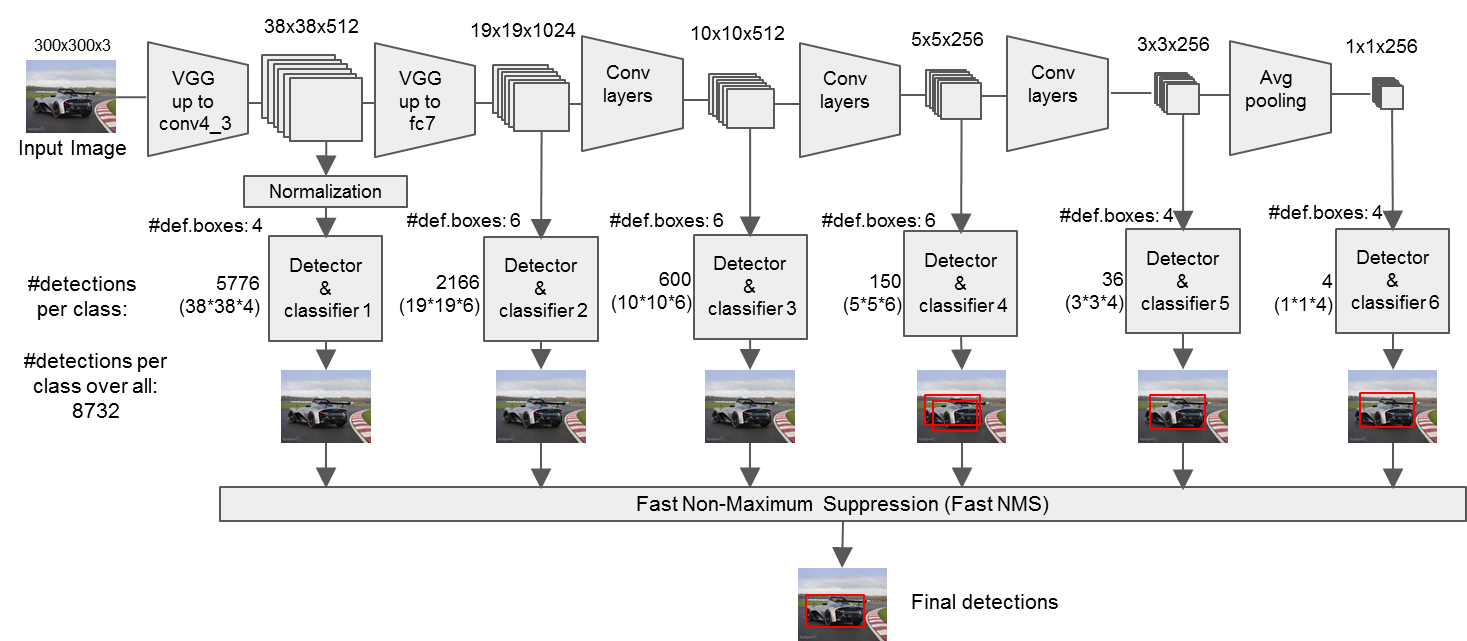
- SSD (Single Shot Multibox Detector):
- 算法简介: SSD是一种多尺度目标检测算法,通过在不同层的特征图上应用不同尺度的锚框来处理不同大小的目标。
- 特点: SSD在每个特征图上都预测目标框的类别和位置,通过级联多尺度的预测,提高了检测性能。
- 论文: "SSD: Single Shot MultiBox Detector" (2016)
- RetinaNet:
- 算法简介: RetinaNet引入了Focal Loss,解决了类别不平衡问题,提高了小目标检测的性能。
- 特点: 使用了特征金字塔网络(Feature Pyramid Network,FPN)来处理不同尺度的特征信息,并结合了有效的锚框生成。
- 论文: "Focal Loss for Dense Object Detection" (2017)
这些算法都属于anchor-based目标检测范畴,它们在设计上使用了预定义的锚框,通过这些锚框来生成候选目标框,然后通过训练网络来优化这些框的位置和类别信息。每个算法都有其独特的特点和优势,适用于不同的应用场景和需求。
文章来源:https://blog.csdn.net/kwdx2/article/details/135180045
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!