现代雷达车载应用——第2章 汽车雷达系统原理 2.5节 检测基础
?????????经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.5?检测基础
????????对于要测试目标是否存在的雷达测量,可以假定下列两个假设之一为真:
?????????H0:—测量结果仅为噪声。
?????????H1:—测量是噪声和目标回波的综合结果。
????????雷达系统的检测逻辑检查每个测量,并选择一个假设作为测量的最佳计量。如果选择H0,则系统声明测量完全来自噪声,目标不存在。另一方面,如果选择H1,雷达系统声明目标存在。
???????? 概率密度函数(pdf)可以用来分析信号。两个概率密度函数, py (y|H0)和py (y|H1),分别定义了H0和H1假设。y为待测的测量样本。py (y|H 0)是目标不存在时y的概率密度函数, py (y|H1)是目标存在时y的概率密度函数。根据这两个概率密度函数,可以定义以下概率:
???????? ?探测概率(PD):当目标实际存在时,雷达系统宣称探测到目标的概率(选择H1)。
?????????虚警概率(PFA):雷达系统宣称探测到目标(选择H1),而目标实际上并不存在的概率。
????????为了进一步讨论如何使用PD和PFA来表征雷达系统,考虑雷达系统的噪声为白噪声,py (y|H0)为正态分布。另外,考虑目标为非起伏,因此py (y| H1)也是正态分布,因为H1是噪声与目标回波的组合。
????????![]() ??(2.80)
??(2.80)
????????![]() ??(2.81)
??(2.81)
???????? 这里![]() 和
和![]() 分别是假设H0和H1的平均幅度。
分别是假设H0和H1的平均幅度。![]() 和
和![]() 分别是H0和H1的方差。所以,概率密度函数为:
分别是H0和H1的方差。所以,概率密度函数为:
????????  ? (2.82)
? (2.82)
???????? ??(2.83)
??(2.83)
????????图2.16画了这两个概率密度函数,py (y|H0)和py (y|H1)。在雷达系统中,更常用的是使用Neyman-Pearson准则,在虚警概率PFA不超过一个常数的约束下,选择一个阈值T使检测概率PD最大化。如图2.16所示,PFA为py (y|H0)(蓝色阴影)中阈值T以上的面积,可通过下式计算:
???????? ??(2.84)
??(2.84)
????????PD为py (y|H1)(红色阴影)中阈值T以上的面积:
???????? ??(2.85)
??(2.85)
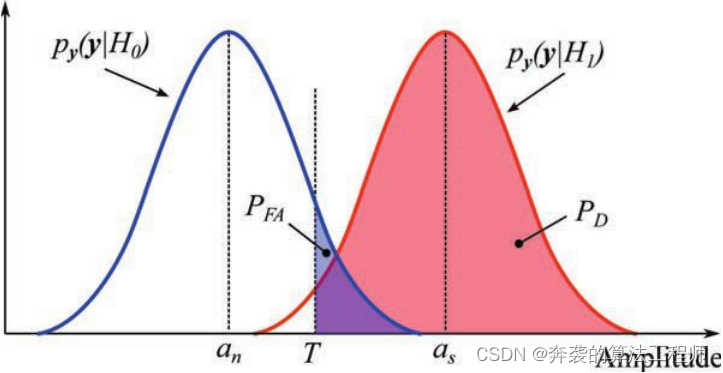
图2.16 假设H0和H1的概率密度函数
????????需要注意的是,只要选择阈值T,PFA就保持不变。然而,PD随信噪比SNR而变化,图2.16中信噪比为![]() 。PD随信噪比的增加而增加,如图2.17所示,其中PFA=1×10-6。相干处理意味着考虑相位信息,而非相干处理则抛弃相位信息。图2.18显示了信噪比为10 dB时的PD与PFA图。
。PD随信噪比的增加而增加,如图2.17所示,其中PFA=1×10-6。相干处理意味着考虑相位信息,而非相干处理则抛弃相位信息。图2.18显示了信噪比为10 dB时的PD与PFA图。
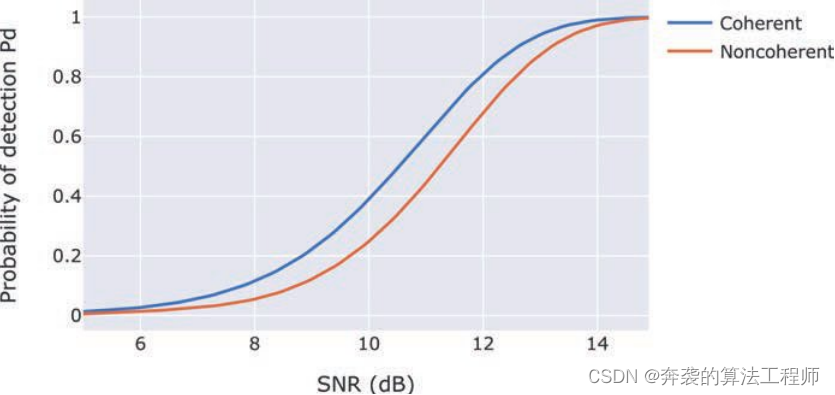
图2.17 检测概率和SNR关系,PFA=1×10-6
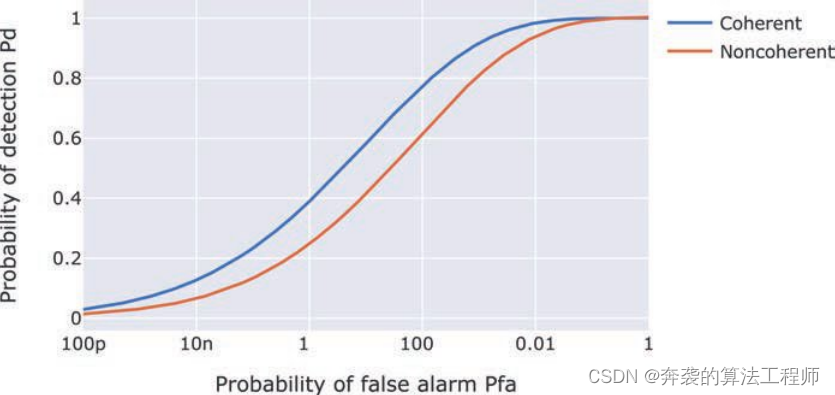
图2.18 检测概率和虚警概率关系,SNR=10dB
2.5.1?相干和非相干积累
????????积累是雷达信号处理中提高信噪比的常用技术之一。相干积累和非相干积累都有广泛的应用。相干积累是指对复数数据的积累,非相干积累是指仅基于数据大小的积累。从图2.17和图2.18可以看出,即使不做积累,在处理中丢弃相位也会有少量的信噪比损失。
???????? 相干积累有利于提高信噪比。然而,它也需要更多的处理,因为它需要处理复数数据。假设雷达从目标的回波接收到测量值![]() ,其中A是幅度,?是相位,ω是功率为σ2的加性噪声。信噪比定义为
,其中A是幅度,?是相位,ω是功率为σ2的加性噪声。信噪比定义为
???????? ??(2.86)
??(2.86)
????????假设测量已经进行了N次,则可能有N个通道进行相同的测量或重复测量N次。对于重复的测量数据,期望回波响应是相同的,但每次的噪声是独立的。因此,所有的测量结果都可以添加相位信息。
???????? ??(2.87)
??(2.87)
????????积累信号部分的功率是N2 *A2。对于独立噪声部分,总噪声功率为单个噪声功率之和,即N* σ2。综合信噪比为:
???????? ??(2.88)
??(2.88)
????????积累次数N也称为相干积累增益。对于相干积累,假设信号部分的相位在多次测量中保持相同。然而,在现实中并不总是如此。大多数情况下,需要对信号进行预处理,使每次测量的相位一致。这个过程还需要额外的相干积累计算。当PFA = 1 * 10 -6时,PD与信噪比、积累N之间的关系如图2.19所示。
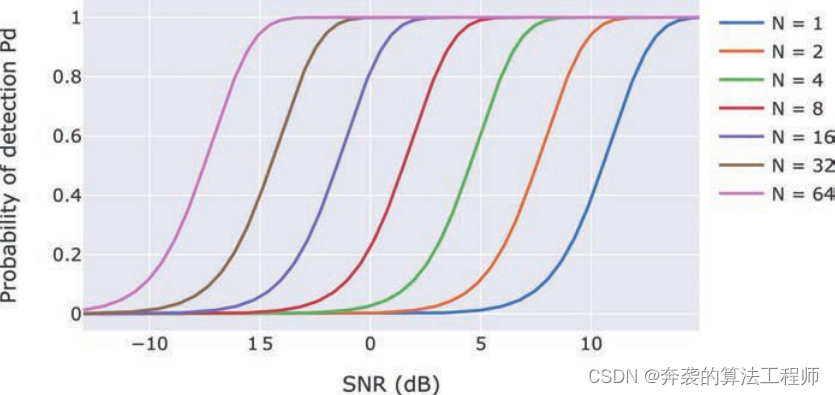
图2.19 PFA = 1 * 10 -6时PD与相干积累信噪比之间的关系
????????考虑一个非起伏目标的非相干积累,也被称为“Swerling 0”或“Swerling V”目标,具有高斯白噪声ω。为简单起见,假设ω的总功率为1。假设H0下,目标不存在,y的概率密度函数y=|ω|遵循瑞利分布。
???????? ??(2.89)
??(2.89)
????????假设H1下,![]() 是一个莱斯分布:
是一个莱斯分布:
???????? ??(2.90)
??(2.90)
????????这里![]() 是0阶第一类修正贝塞尔函数。
是0阶第一类修正贝塞尔函数。
????????通过对N(N> 1)个样本进行非相干积累,得到H0假设下的概率分布为爱尔朗分布。
???????? ??(2.91)
??(2.91)
????????假设H1下的概率密度函数为:
???????? ??(2.92)
??(2.92)
????????这里![]() 被用作一个平方律检测器。
被用作一个平方律检测器。
????????这些方程式的详细推导不在本章中列出,因为它超出了本书的范围。为了更好地理解非相干积累,图2.20和图2.21提供了非相干积累效果的简单说明。在图2.20和图2.21中,未积累的原始信噪比均为4 (6 dB)。图2.20和图2.21分别是N= 2, N= 10的情况。为了计算积累后的信噪比,需要计算所有概率密度分布的均值。对于(2.91)中的爱尔朗分布,均值为μH0 = N。对于式(2.93)中的分布,可以通过数值方法计算求得均值:
???????? ??(2.93)
??(2.93)

图2.20 2个测量的非相干积累的H0和H1的概率密度函数
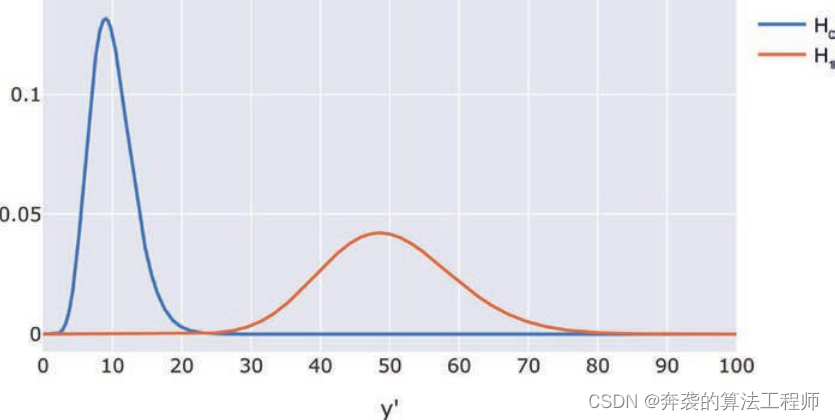
图2.21 10个测量的非相干积累的H0和H1的概率密度函数
????????对于图2.20中N=2,![]() ,
,![]() ,
,
???????? ??(2.94)
??(2.94)
????????对于图2.21中的例子,N=10,![]() ,
,![]()
???????? ??(2.95)
??(2.95)
????????因此,非相干积累实际上不能提高信噪比。
????????现在考虑不同N值的PFA。基于PFA和(2.91)很难解析导出阈值T。更简单的方法是用数值方法计算p y ‘ (y ‘|H 0)的积分,如下所示:
???????? ??(2.96)
??(2.96)
????????图2.22显示了N= 2和N= 10时PFA与归一化阈值T’的关系。阈值被归一化为(2.89)中概率密度函数的平均值,以便更好地进行比较。对于N= 2,? T’= 5.9得到10 -4,另一方面,为了得到相同的PFA,在N= 10的情况下T’ = 2.6。因此,对于非相干积累,通过降低某些PFA的阈值来实现有效增益。换句话说,通过更多的积累,可以用更低的阈值实现相同的PFA,并且要检测的目标所需的最小信噪比也降低了。
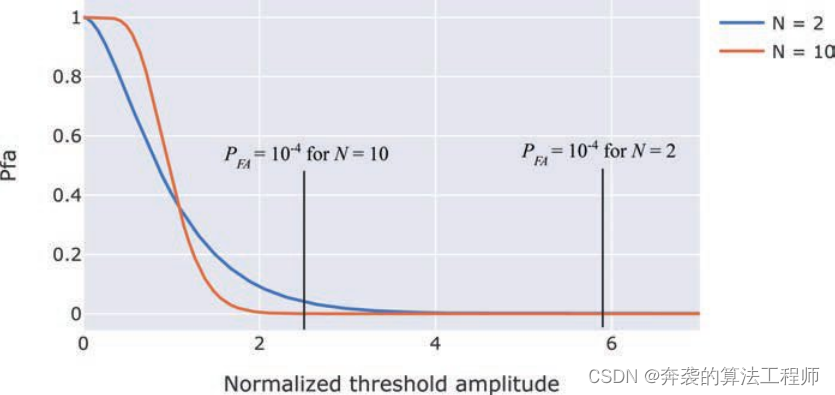
图2.22 不同积累数值下PFA和归一化阈值关系
????????之前的分析只考虑了非起伏性目标,即“Swerling 0”或“Swerling V”的情况。更现实的情况是上面提到的起伏目标,包括“Swerling I、II、III和IV”模型。用于起伏目标的概率密度函数的推导超出了本书的范围。
????????流行的信号处理工具,如MATLAB?,具有方便的功能来进行这种分析。图2.23和2.24显示了在PFA = 1 * 10 -6条件下,Swerling I、II、III、IV和V模型的PD与非相干积累信噪比的关系。(表2.6)
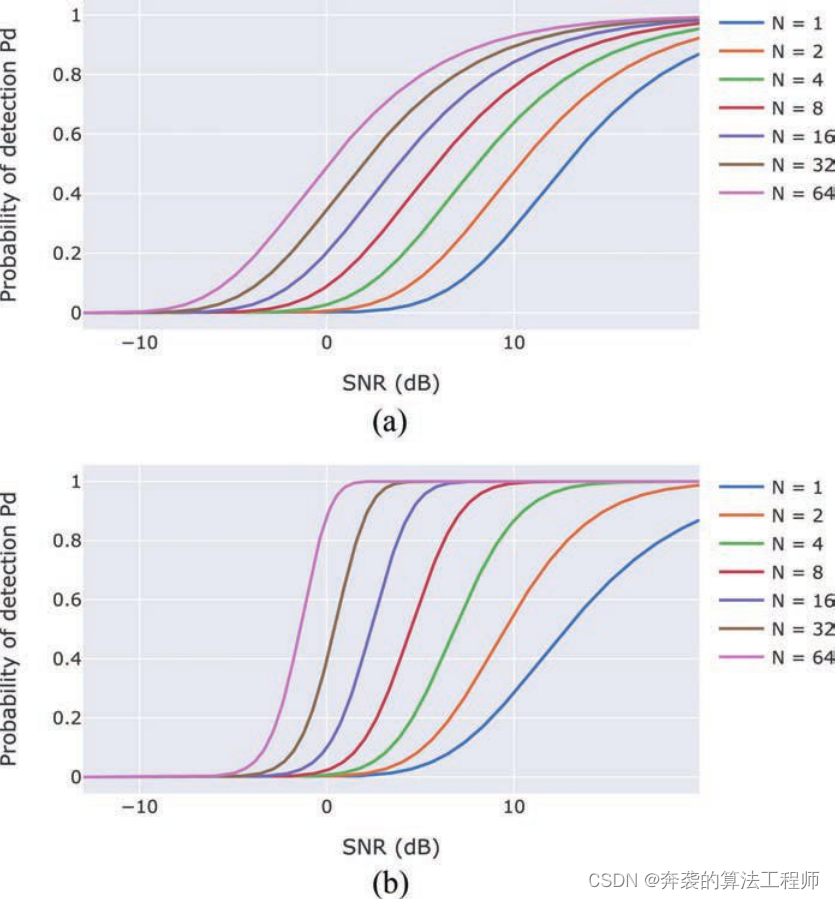
图2.23 PFA = 1 * 10 -6时PD与非相干积累信噪比的关系
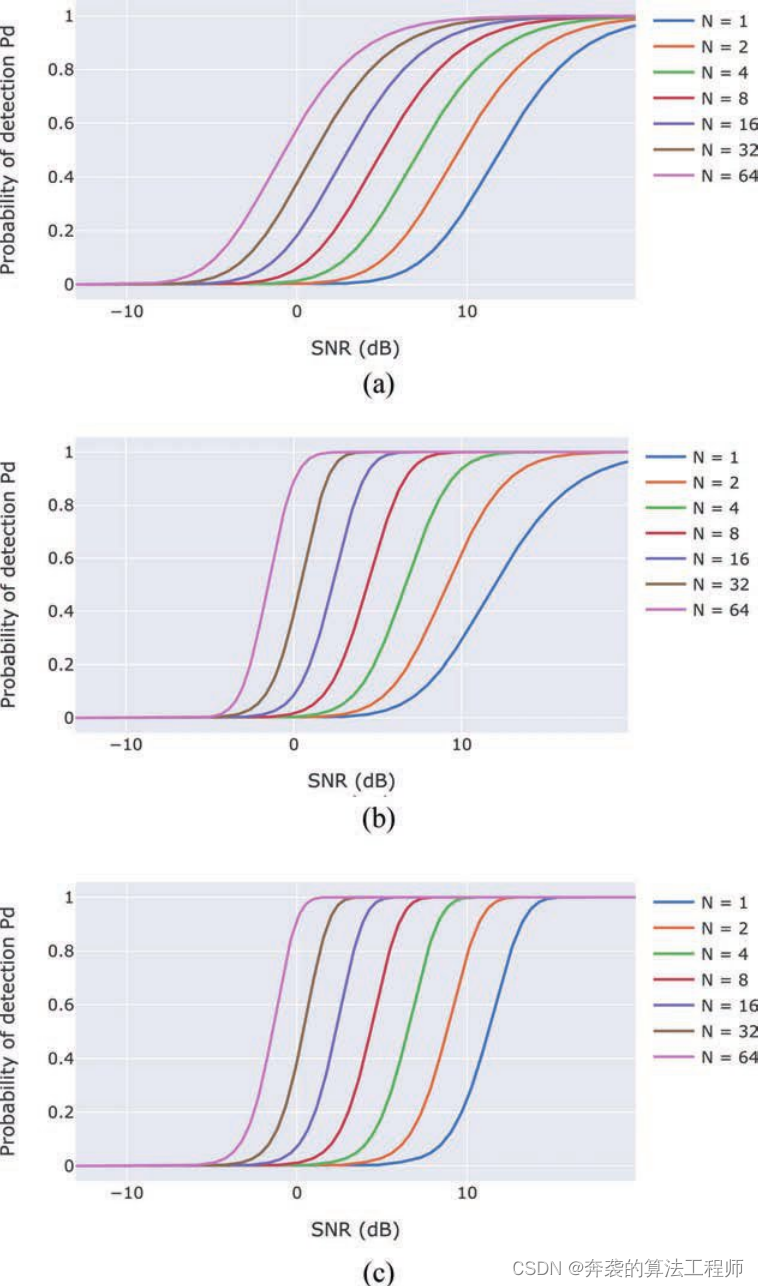
图2.24 PFA = 1 * 10 -6时PD与非相干积累信噪比的关系
2.5.2确定检测概率和虚警概率的最小信噪比
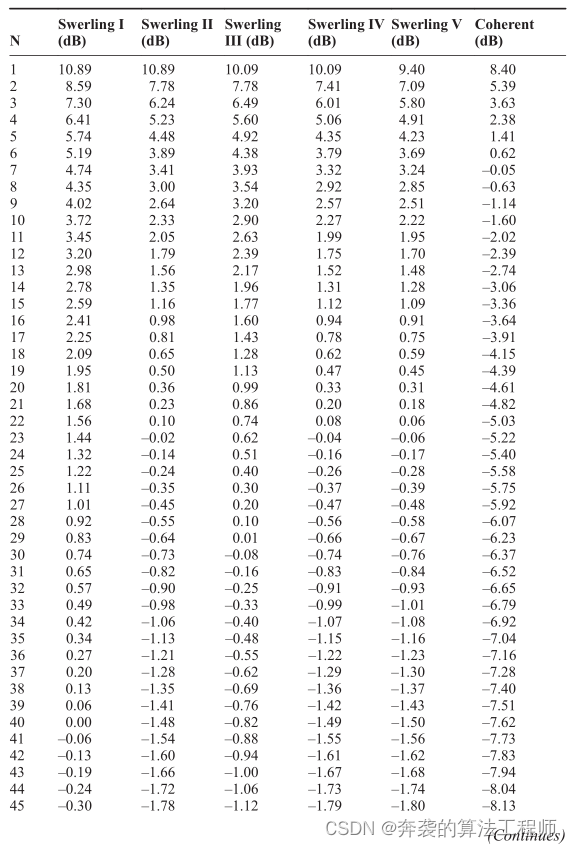
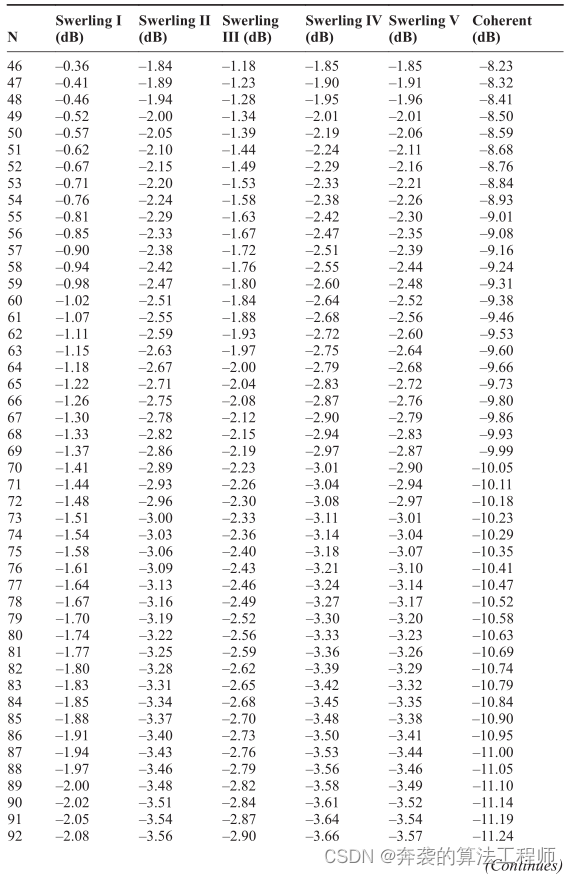
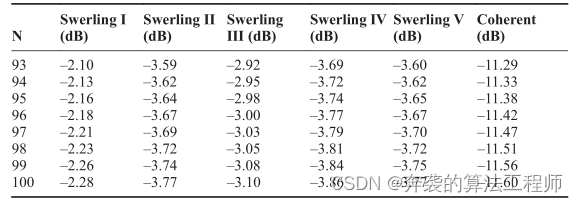
???????? 在前面的内容中已经讨论了PD和PFA的关系。对于一定的PFA,可以由py’ (y’|H0)得到一个阈值,该阈值为无目标回波噪声的概率密度函数(PDF)。另一个阈值也可以由p y’ (y’|H1)得到,它是基于一定PD的带噪声的目标回波PDF值,通常这两个阈值是分开的,它们的差值随着信噪比的降低而减小。在一定信噪比下,这两个阈值彼此相等。该信噪比是满足预定义的PD和PFA所需的最小信噪比。在积累的情况下,积累后的最小信噪比之差等于积累增益。表2.6给出了不同目标模型和积累类型下,PFA = 10 -4和PD = 0.5所需的最小信噪比。
???????? 对于汽车雷达应用,最小信噪比对于评估雷达的探测能力或灵敏度非常有用。例如,在紧急制动系统中使用雷达,需要在R0距离内检测到PD = 0.5和PFA = 10-4的行人。行人通常被归类为“Swerling I”目标,其典型RCS约为-10dBsm。由表2.6可知,所需的最小信噪比为10.89 dB。因此,对于-10dBsm的目标,雷达需要设计成在R0距离内具有至少10.89dB的信噪比。如果设计的雷达在处理过程中非相干积累了8个通道,则所需的最小信噪比可以放宽到4.35 dB。信噪比差10.89 ~ 4.35 = 6.54 dB为Swerling I目标的非相干积累增益。
表2.6 PFA = 1 * 10 -4,PD=0.5的最小信噪比
2.5.3恒虚警率检测
????????如上所述,标准雷达阈值检测假设接收机上的噪声水平已知且稳定。因此,可以获得准确的阈值,以保证指定的PFA。然而,在现实世界中,噪声水平随多种因素而变化,包括环境、温度和组件老化。雷达系统需要从测量值中估计噪声级,并在此基础上导出阈值。温度补偿和周期性重新校准可以部分解决噪声功率变化的问题;然而,这些方法在汽车应用的大批量生产中并不实用。此外,汽车雷达经常暴露在复杂的电磁环境中,受到周围车辆雷达的干扰。强干扰会显著提高噪声功率。因此,汽车雷达噪声功率的自适应计算一直是必要的。
????????恒定虚警率(CFAR)检测,也称为“自适应阈值检测”或“自动检测”,是一组旨在在现实噪声场景中提供可预测的检测和虚警行为的技术。对于CFAR检测,必须实时从数据中估计实际噪声功率,以便调整检测器阈值以保持理想的PFA。从简单到复杂的各种CFAR算法已被报道。为了提供对CFAR检测的基本印象,本节将简要讨论两种基本的CFAR算法,即单元平均CFAR (CA- CFAR)和有序统计CFAR (OS- CFAR)。
2.5.3.1 CA-CFAR
???????? CA-CFAR是最基本的CFAR算法之一。它也被用作其他CFAR技术的基线比较。图2.25给出了一维CA-CFAR的滑动窗口处理结构,也可以在二维距离多普勒图像中进行计算,如图2.26所示。噪声样本从被测单元(CUT)周围的先导单元和滞后单元(训练单元)中提取。保护单元被放置在CUT附近。这些保护单元的目的是为了避免信号成分泄漏到训练单元中,从而对噪声估计产生不利影响。噪声功率Pn可计算为
???????? ??(2.97)
??(2.97)
???????? 其中M是训练单元的个数,ym是第M个训练单元的功率。训练单元和保护单元的数量可以根据需要进行调整。阈值T由下式给出
???????? ![]() ? (2.98)
? (2.98)
????????其中,比例因子α称为阈值因子。α的值根据期望虚警率PFA和(2.96)计算。如果没有脉冲积累,可以通过下式获得:
????????![]() ??(2.99)
??(2.99)
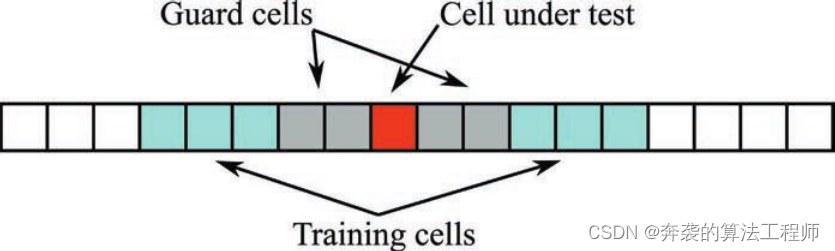
图2.25 一维CA-CFAR处理
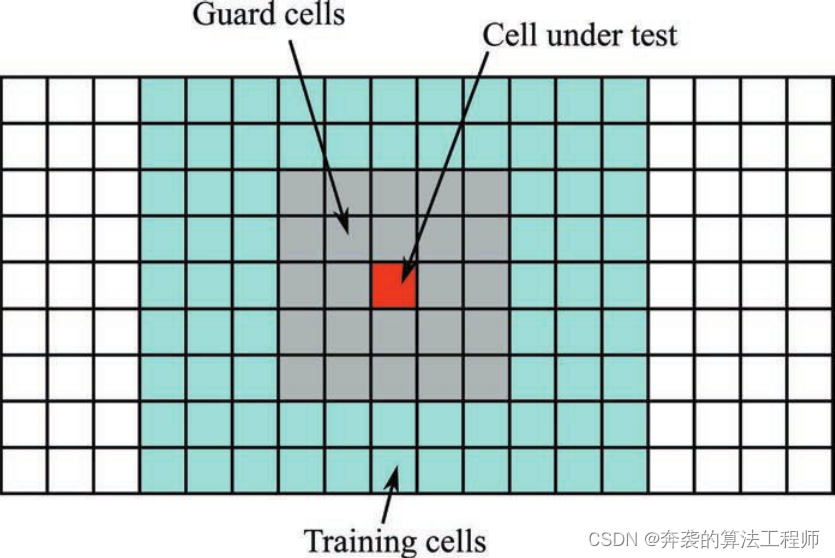
图2.26 二维CA-CFAR处理
????????图2.27为FMCW雷达中CA- CFAR的工作原理。试验中有两个95米和30米的目标。CA- CFAR使用两个保护单元和10个尾随单元,PFA = 10-2。从图2.27可以看出,CA- CFAR阈值在目标峰值附近有很高的肩部,这意味着除了大目标之外,更小的目标会被阈值所掩盖。因此,CA- CFAR需要假设目标需要被隔离,并且目标需要被隔离得足够远,以便它们不会被其他目标的肩膀掩盖。CA- CFAR的另一个假设是训练单元的噪声是独立且均匀分布的。
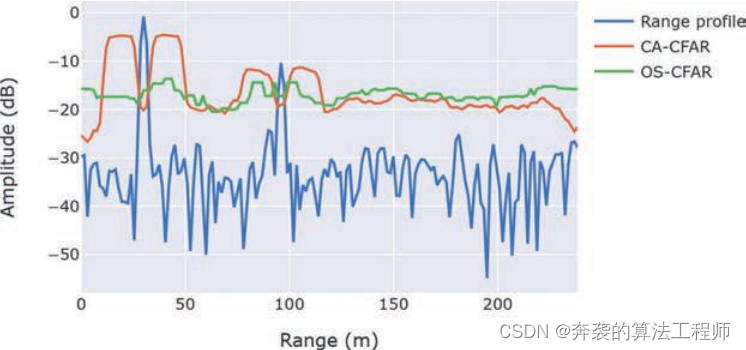
图2.27 CA-CFAR和OS-CFAR表现示例
????????由于CA- CFAR的性能限制,导致了对CA- CFAR的许多扩展,如最小单元平均CFAR和较大单元平均CFAR。
2.5.3.2 OS-CFAR
????????OS- CFAR是CFAR阈值的另一种基于范围的方法。OS- CFAR使用与CA- CFAR类似的一维或二维滑动窗口结构,如图2.25和2.26所示。必要时可以使用保护单元。与CA-CFAR不同,OS- CFAR对训练单元中的数据样本[y 1, y 2,…,yM]进行排序形成一个新的升序序列,表示为[y (1),y(2),…,y(M)]。然后,选择有序列表中的第k个元素作为噪声级的代表,并设置一个阈值为该值的倍数:
???????? ![]() ? (2.100)
? (2.100)
????????αOS的计算参见文献[29]。噪声仅从一个数据样本中估计,而不是所有数据样本的平均值。然而,由于使用的样本是基于所有数据样本确定的,因此阈值实际上利用了所有样本的信息。
????????图2.27为FMCW雷达中OS- CFAR的工作原理;M= 20, k = 15, PFA= 10-2。可以看出,OS- CFAR在目标峰周围没有高的肩膀。OS- CFAR的主要缺点是执行排序算法需要较高的处理能力,而且这种处理能力必须在雷达信号处理的实时部分提供。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!