人工智能利用深度学习技术增强高级驾驶辅助系统(ADAS)
深度学习通过实时传感器数据增强高级驾驶辅助系统(ADAS),实现精确的物体检测、碰撞预测和主动决策。
人工智能和机器学习利用深度学习技术的优势,使高级驾驶辅助系统(ADAS)发生了重大变革。ADAS在很大程度上依赖深度学习来分析和解释从各种传感器获得的大量数据。摄像头、激光雷达(光探测和测距)、雷达和超声波传感器都是传感器的一些例子。这些传感器从车辆周围环境中实时收集的数据包括图像、视频和传感器读数。

通过将机器学习开发技术有效地整合到训练深度学习模型中,ADAS可以实时分析传感器数据并做出明智的决策,以提高驾驶员的安全性并辅助驾驶任务,为未来的自动驾驶做好准备。它们还可以估计周围物体的距离、速度和轨迹,使ADAS能够预测潜在的碰撞,并提供及时的警告或采取预防措施。以下深入了解先进驾驶辅助系统中深度学习技术的关键步骤,以及开发和部署ADAS中常用的工具。
一、开发和部署ADAS深度学习模型的关键步骤
1.数据预处理
ADAS中的数据预处理侧重于准备收集到的数据,以便进行有效的分析和决策。它涉及的任务包括清理数据以消除错误和不一致,通过插值或外推法处理缺失值,处理异常值以及规范化特征。对于图像数据,调整大小可以确保一致性,而规范化方法标准化像素值。传感器数据,例如激光雷达或雷达读数,可能会经过过滤技术,例如噪声去除或异常值检测,以提高质量。
通过执行这些预处理步骤,ADAS可以使用可靠和标准化的数据,提高预测的准确性和整体系统性能。
2.网络架构选择
网络架构选择是ADAS中的另一个重要过程,因为它可以优化性能,确保计算效率,平衡模型复杂性和可解释性,实现对不同场景的泛化,并适应硬件约束。通过选择合适的架构,例如用于视觉任务的卷积神经网络(CNN)和用于序列数据分析的递归神经网络(RNN)或长短期记忆网络(LSTM),ADAS可以提高准确性,实现实时处理,解释模型决策,并在资源有限的情况下有效处理各种驾驶条件。卷积神经网络(CNN)利用卷积和池化层来处理图像并捕捉空间特征,而递归神经网络(RNN)或长短期记忆网络(LSTM)则捕捉时间依赖性并保留记忆,用于预测驾驶员行为或检测困倦等任务。
3.训练数据准备
ADAS中的训练数据准备有助于数据拆分、数据扩充和其他必要步骤,以确保有效的模型学习和性能。数据拆分包括将收集的数据集拆分为训练集、验证集和测试集,从而能够训练深度学习网络,使用验证集调整超参数,并使用测试集评估最终模型的性能。
使用数据增强技术,例如翻转、旋转或在图像中添加噪声,以增强训练数据的多样性和大小,降低过拟合的风险。这些步骤共同提高了训练数据的质量、多样性和可靠性,使ADAS能够做出准确而稳健的决策。
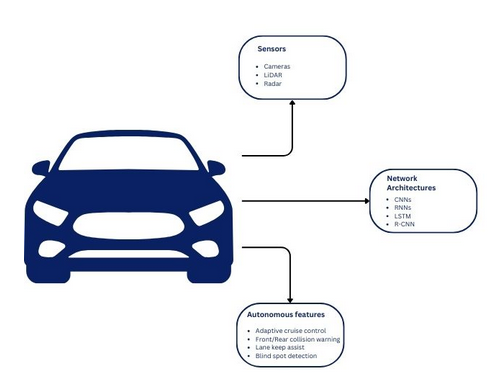
ADAS中的网络架构和自治特性
4.训练过程
ADAS系统的训练过程包括使用优化算法和损失函数训练深度学习模型。这些方法被用来优化模型的性能,最大限度地减少误差,并在真实世界的驾驶场景中实现准确的预测。通过优化过程调整模型的参数,使模型从数据中学习,提高其做出明智决策的能力,增强ADAS的整体有效性。
5.物体检测与跟踪
物体检测和跟踪也是ADAS的关键步骤,因为它使系统能够检测车道或实施行人检测以提高道路安全。在ADAS中有几种执行目标检测的技术。一些流行的基于深度学习的技术是基于区域的卷积神经网络(R-CNN)、单镜头多盒检测器(SSD)和You Only Look Once(YOLO)。
6.部署深度学习模型
在ADAS中部署深度学习模型,可以确保经过训练的深度学习模型与车载计算机或专用处理器等车辆硬件组件兼容。你必须对深度学习模型进行调整,使其能够在已经存在的硬件架构中无缝地工作。这些模型需要集成到车辆的软件堆栈中,以便与其他软件模块和传感器进行通信。
它们处理来自各种来源的实时传感器数据,例如摄像头、激光雷达、雷达和超声波传感器。这些部署的模型分析传入的数据流,检测物体,识别车道标记,并根据它们的解释做出与驾驶相关的决策。这种实时处理对于在紧急情况下提供及时警告和协助驾驶员至关重要。
二、持续学习和更新
- 在线学习:ADAS系统可设计为基于新数据和经验不断学习和更新深度学习模型。这包括整合机制,使模型适应不断变化的驾驶条件、新场景和不断发展的安全要求。
- 数据收集和注释:持续学习需要收集新的数据和注释来训练更新的模型。这可能涉及从各种传感器获取数据,人工注释或标记收集到的数据,并相应地更新训练管道。
- 模型再训练和微调:当收集到新数据时,可以使用新数据对现有的深度学习模型进行重新训练或微调,以适应新出现的模式或驾驶环境的变化。
以下了解ADAS开发中常用的工具、框架和库。
- TensorFlow:谷歌开发的开源深度学习框架。它为构建和训练神经网络提供了一个全面的生态系统,包括数据预处理、网络构建和模型部署的工具。
- PyTorch:另一个广泛使用的开源深度学习框架,提供动态计算图,使其适合研究和原型设计。它为构建和训练深度学习模型提供了一系列工具和实用程序。
- Keras:一个运行在TensorFlow之上的高级深度学习库。它为构建和训练神经网络提供了一个用户友好的界面,使初学者和快速原型制作都可以访问它。
- Caffe:专为速度和效率而设计的深度学习框架,通常用于ADAS中的实时应用。它为模型部署提供了一组丰富的预训练模型和工具。
- OpenCV:一种流行的计算机视觉库,提供广泛的图像和视频处理功能。它经常用于预处理传感器数据,执行图像转换,并在ADAS应用程序中实现计算机视觉算法。
总而言之,将深度学习技术集成到ADAS系统中,使其能够分析和解释来自各种传感器的实时数据,从而实现准确的目标检测、碰撞预测和主动决策。这最终有助于实现更安全、更先进的驾驶辅助功能。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!