ros2 学习06 节点的定义及示例
ros2 中节点是什么?
机器人是各种功能的综合体,每一项功能就像机器人的一个工作细胞,众多细胞通过一些机制连接到一起,成为了一个机器人整体。
在ROS中,我们给这些 “细胞”取了一个名字,那就是节点。
比如控制底盘运行的节点,控制物体识别的是另外一个节点等等
通信模型
完整的机器人系统可能并不是一个物理上的整体,比如这样一个的机器人:
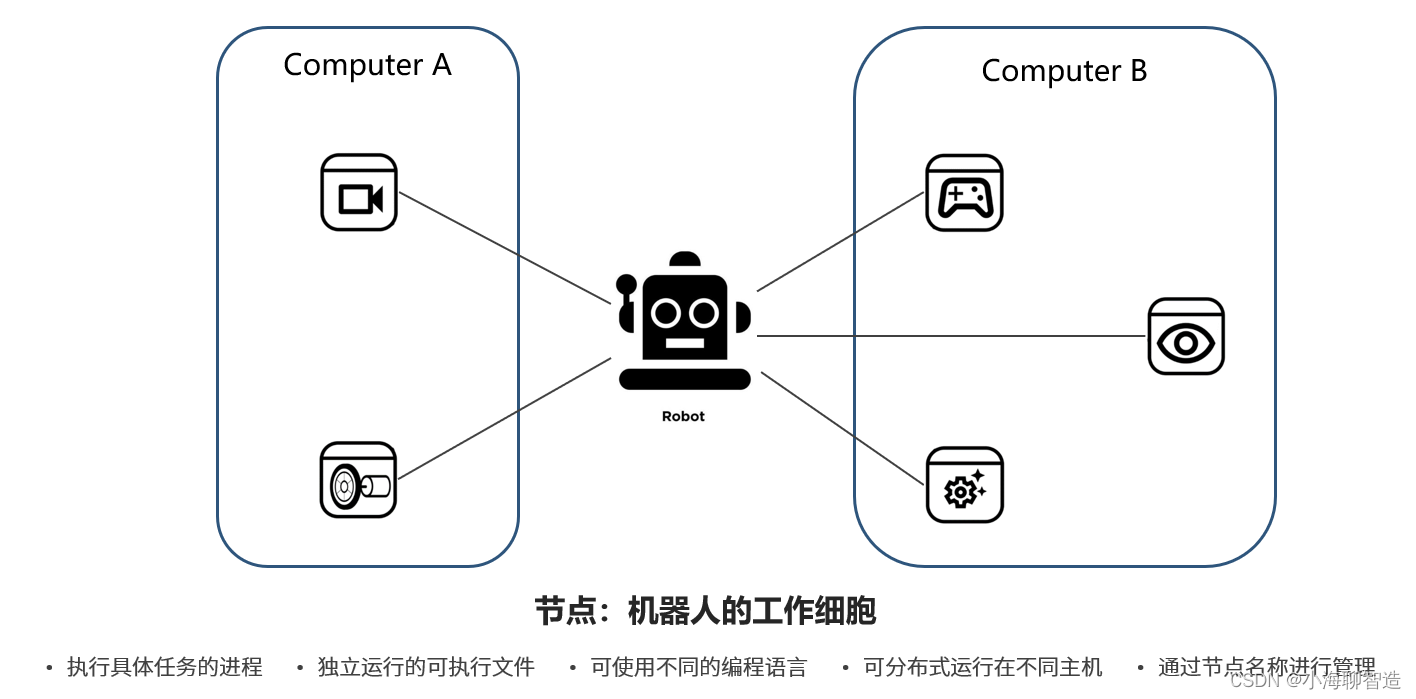
在机器人身体里搭载了一台计算机A,它可以通过机器人的眼睛——摄像头,获取外界环境的信息,也可以控制机器人的腿——轮子,让机器人移动到想要去的地方。除此之外,可能还会有另外一台计算机B,放在你的桌子上,它可以远程监控机器人看到的信息,也可以远程配置机器人的速度和某些参数,还可以连接一个摇杆,人为控制机器人前后左右运动。
这些功能虽然位于不同的计算机中,但都是这款机器人的工作细胞,也就是节点,他们共同组成了一个完整的机器人系统。
-
节点在机器人系统中的职责就是执行某些具体的任务,从计算机操作系统的角度来看,也叫做进程;
-
每个节点都是一个可以独立运行的可执行文件,比如执行某一个python程序,或者执行C++编译生成的结果,都算是运行了一个节点;
-
既然每个节点都是独立的执行文件,那自然就可以想到,得到这个执行文件的编程语言可以是不同的,比如C++、Python,乃至Java、Ruby等更多语言。
-
这些节点是功能各不相同的细胞,根据系统设计的不同,可能位于计算机A,也可能位于计算机B,还有可能运行在云端,这叫做分布式,也就是可以分布在不同的硬件载体上;
-
每一个节点都需要有唯一的命名,当我们想要去找到某一个节点的时候,或者想要查询某一个节点的状态时,可以通过节点的名称来做查询。
节点也可以比喻是一个一个的工人,分别完成不同的任务,他们有的在一线厂房工作,有的在后勤部门提供保障,他们互相可能并不认识,但却一起推动机器人这座“工厂”,完成更为复杂的任务。
接下来,我们就来看看, 节点这个工作细胞,到底该如何实现。
示例: 新增一个节点并运行
- 创建一个python 功能包
ros2 pkg create --build-type ament_python learning_node
colcon build --packages-select learning_node
编译成功
设置环境变量
source install/local_setup.bash
成功创建功能包后 可以看到工作空间下多个一个目录,learning_node,
这个时候的learing_node 还有一个learing_node 的目录,我们的代码就放在这个目录里
编写代码
新增helloworld.py
代码如下
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = Node("node_helloworld") # 创建ROS2节点对象并进行初始化
while rclpy.ok(): # ROS2系统是否正常运行
node.get_logger().info("Hello World") # ROS2日志输出
time.sleep(0.5) # 休眠控制循环时间
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'helloworld = learning_node.helloworld:main',
],
重新编译功能包
colcon build --packages-select learning_node
编译成功:
运行测试节点
ros2 run learning_node helloworld
运行成功后日志打印如下:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!