机器视觉10
PatInspect的缺陷检测
- PatInspect工具的用途:
检测产品特征缺失或错位、产品上存在错误或无用的标记、表面颜色错误等等场合;
- PatInspect工具的原理:
通过PMAlign工具实现,用训练图片和当前输入图片进行对比从而得到缺陷.

?1.添加模板匹配工具? 用于缺陷检测对比 的图像处理
2.添加缺陷检测工具?
3.CogPatInsecptTool 的输入图像链接到图像源的“OutputImage”,
4.“pose”链接到CogPMAlignTool的GetPose输出 
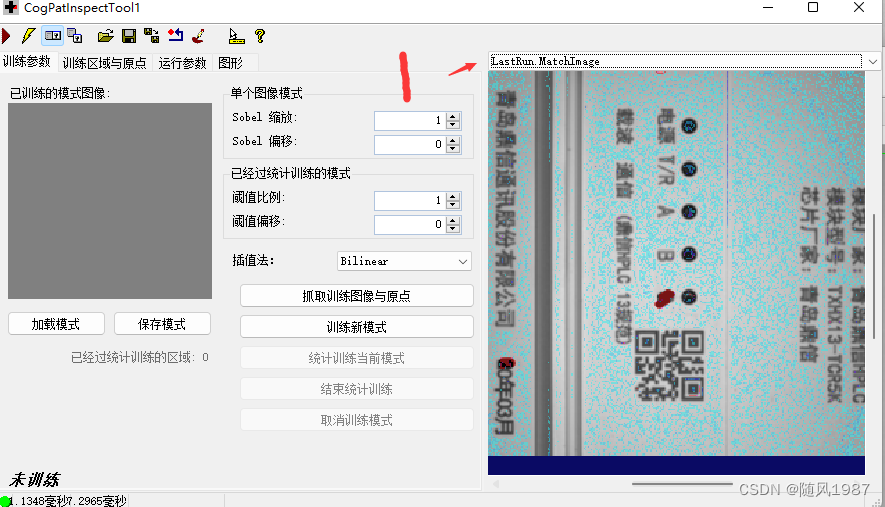
1.点击外层ToolGroup的运行按钮,使得CogPatInspectTool 获取到一幅良品图像,点击“抓取训练图像与原点”,得到用于训练的图像;
2.在右侧的下拉列表中选择Current.TrainImage;
3.选择检测区域,可以通过掩膜对检测区域进行调整,屏蔽变量部分与光照不稳定部分,从而避免检测过程中的误检。
4.点击“训练新模式”,此时相当于提供了一幅良品图像到工具中,如果想添加多副训练图像需要从外层运行程序,使得CogPatInspectTool重新获取一幅图像,点击“统计训练当前模式”。注意,在训练过程中的添加的图像必须是良品图像,如果误将不良品图像添加到训练数据中会造成灾难性的后果。
5.训练图像添加完成之后,点击“结束统计训练”,
6.如果对当前的训练结果不满意,点击“取消训练模式”,所有的训练数据清空,可以重新进行添加训练图像。黄色矩形框中的参数用于设置从标准差图像到阈值图像的线性变换系数,单幅图像与多副图像需分开进行设置

?1.选择对应的归一化算法Histogram Equalization,通常情况下选择默认即可
为了抑制因光照不稳定引起的误检,运行时图像与训练图像进行对比前需要对运行时图像进行归一化,调节整体亮度水平,使得运行时图像与训练后图像在同一亮度环境中进行比较。CogPatInspectTool的图像归一化方法有以下几种:
- Identity
对运行时图像不进行归一化,主要是在测试阶段用来进行观察,确定不进行归一化可能出现的缺陷位置与缺陷类型 - Histogram Equalization
直方图均衡化,调整运行时图像的灰度直方图与训练后图像的灰度直方图相匹配,适用于检测面积比较小的情况,因为大面积出现缺陷会影响灰度直方图分布。 - Match Tails
忽略“高尾部”与“低尾部”对运行时图像的直方图进行调整与训练后的图像相匹配,适用于图像中可能出现阴影或者耀光的情况。 - Mean and Standard Deviation
通过运行时图像灰度直方图的平均值与标准差对灰度直方图进行调整,适用于大小适中的缺陷检测以及光照变换比较明显的情况。 - Robust Line Fit
通过选择最佳拟合的线性直方图均衡化函数来调整像素值。与其它的归一化方法相比,该方法可以容忍更大的缺陷,但需要更多的处理时间。当缺陷面积超过加检测区域的四分之一甚至更多时,并且缺陷像素值可以位于参考图像的左右尾部之外时,请使用稳健的线拟合方法。 - Local Correction or Enhanced Local Correction
局部修正方法,先对运行时图像进行矩形分割,再对每个区域进行归一化处理

1.点击外层ToolGroup的运行按钮,对当前输入图像进行检测即可以看到运行效果。
match image 时将当前图像的待检测区域与训练图像对其之后的结果图? ,在明显的缺陷区域标注为红色,像素差值较大
?1.CogPatInspectTool 最终目的是获取DifferenceImageAbsolute,将此图像输出到blob等工具根据检测面积、位置等进行过滤,最后得出检测结果。

?1.添加blob工具对于缺陷部位进行分析
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!