rosdep init/update失败(转载)
sudo rosdep init
rosdep update如果你直接成功了,可直接跳过当我没说(不过90%的几率你都会失败的啦)
由于http://raw.githubusercontent.com这个网址墙的很厉害,大概率你是成功不了的,这里推荐一种本地化安装的方法
1. 下载rosdistro
git clone https://github.com/ros/rosdistro.git
(如果git都失败了...,可以百度github镜像网站,镜像站下载很方便)
将rosdistro存放在/home/yourname/rosdistro
2. 配置20-default.list文件
运行
sudo rosdep init重新生成/etc/ros/rosdep/sources.list.d/20-default.list. 没有则手动创建/etc/ros/rosdep/sources.list.d/20-default.list.
如果sudo rosdep init成功,直接跳过以下创建文件步骤
进入到/etc/ros/目录下
cd /etc/ros创建rosdep文件
sudo mkdir rosdep && cd rosdep创建sources.list.d文件
sudo mkdir sources.list.d && cd sources.list.d创建20-default.list文档
sudo gedit 20-default.list将20-default.list里面内容修改为下面的代码,注意内容/home/zjl修改为自己的记录路径
# os-specific listings first
yaml file:///home/zjl/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/zjl/rosdistro/rosdep/base.yaml
yaml file:///home/zjl/rosdistro/rosdep/python.yaml
yaml file:///home/zjl/rosdistro/rosdep/ruby.yaml
gbpdistro file:///home/zjl/rosdistro/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead3. 编辑以下文件
/etc/ros/rosdep/sources.list.d/20-default.list
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py搜索文件中的?https://raw.githubusercontent.com/ros/rosdistro/master字段,将其替换为file:///home/yourname/rosdistro(后面的部分保持不变,最好备份一下)
例如:
//进行如下修改
#DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = 'file:///home/zjl/rosdistro/index-v4.yaml
注:最好每个文件都确定一下是否只有一个
例如:我的电脑查找

最后发现不止一个?init.py ,这时最好两个都要修改
4. rosdep update
接下来就可以愉快的rosdep update啦
由于是本地安装就不会失败啦
附上成功截图

五 . 添加环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc最后安装个实用插件
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential六 . 测试
运行
roscore若出现下图,并无报错,就安装好啦

?//
/
这个解决方法是我在群里看到的,近期装了很多次ros都能完美解决,特地转载出来分享给大家,也给自己mark一下。
在安装ROS的过程中,很多同学在执行上述指令时会提示以下错误:
-
ERROR: cannot download default sources list from: -
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list -
Website may be down.
通常的解决办法是用手机热点
或者查询?
https://raw.githubusercontent.com的实际IP地址,但是也有可能会失效。
偶然的机会看到一教程的解决方案。
博主的思路是新思路:将相关资源备份到 gitee,修改?rosdep?源码,重新定位资源。成功率是百分百。
整理修改后提供解决ROS rosdep?init/update报错的方法(终极版)。
步骤1
进入到?sources.list.d?文件夹(如果没有,则用mkdir指令新建)
修改?gedit?20-default.list
-
cd /etc/ros/rosdep/sources.list.d -
sudo gedit 20-default.list
将里面所有的?
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master?
修改前:
-
# os-specific listings first -
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx -
# generic -
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml -
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml -
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml -
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte -
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
修改后:
-
# os-specific listings first rosdep update -
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/osx-homebrew.yaml osx -
# generic -
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/base.yaml -
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/python.yaml -
yaml https://gitee.com/wybros/rosdistro/raw/master/rosdep/ruby.yaml -
gbpdistro https://gitee.com/wybros/rosdistro/raw/master/releases/fuerte.yaml fuerte -
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
步骤2
进入到?rosdep2?文件夹,
修改?gbpdistro_support.py
-
cd /usr/lib/python2.7/dist-packages/rosdep2/ -
sudo gedit gbpdistro_support.py
将里面所有的?
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master?
修改后如下
-
FUERTE_GBPDISTRO_URL = 'https://gitee.com/wybros/rosdistro/raw/' \ -
'master/releases/fuerte.yaml'
步骤3
进入到?rosdep2?文件夹,
修改?rep3.py
-
cd /usr/lib/python2.7/dist-packages/rosdep2/ -
sudo gedit rep3.py
将里面所有的?
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master?
修改后如下
REP3_TARGETS_URL = 'https://gitee.com/wybros/rosdistro/raw/master/releases/targets.yaml'步骤4
进入到?rosdep2?文件夹,
修改?sources_list.py
-
cd /usr/lib/python2.7/dist-packages/rosdep2/ -
sudo gedit sources_list.py
将里面所有的?
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master?
修改后如下
DEFAULT_SOURCES_LIST_URL = 'https://gitee.com/wybros/rosdistro/raw/master/rosdep/sources.list.d/20-default.list'步骤5
进入到?rosdistro?文件夹
修改?__init__.py
-
cd /usr/lib/python2.7/dist-packages/rosdistro/ -
sudo gedit __init__.py
将里面所有的?
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/wybros/rosdistro/raw/master?
修改后如下
DEFAULT_INDEX_URL = 'https://gitee.com/wybros/rosdistro/raw/master/index-v4.yaml'最后
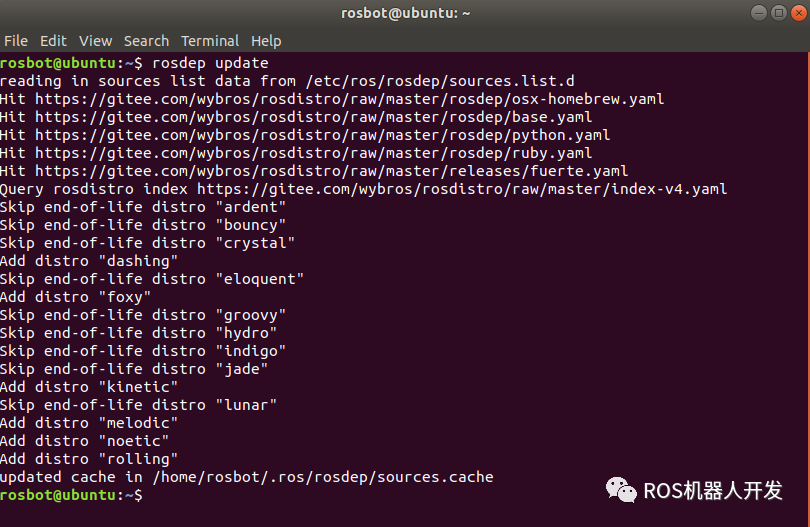
打开新终端执行
rosdep update如果出现如下提示则表示成功!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!