【ROS2】MOMO的鱼香ROS2(一)ROS2入门篇——从Ubuntu操作系统开启
从Ubuntu操作系统开启
引言
笔者跟着鱼香ROS的ROS2学习之旅
学习参考:
【ROS2机器人入门到实战】
1 术语汇总
- Ubuntu:基于linux内核的桌面PC操作系统,术语上喜欢称Ubuntu是一个 linux 发行版
- CPU架构:
amd64
arm
aarch64
2 Ubuntu (操作系统)
Ubuntu官网(https://cn.ubuntu.com/)
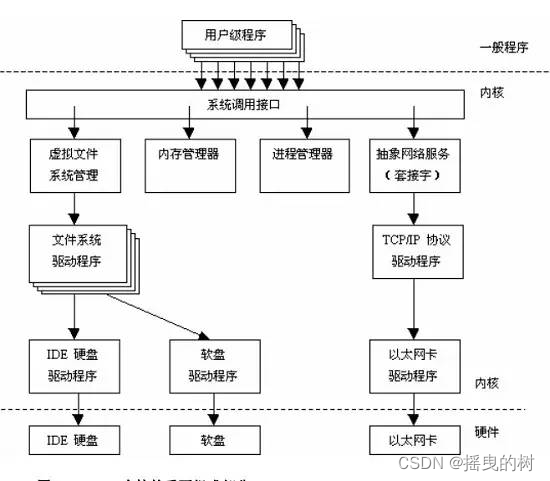
操作系统:管理计算机硬件与软件资源的计算机程序
内核:驱动硬件的程序
2.1 Ubuntu权限管理
权限管理设置:https://juejin.cn/post/6995788320169017375
chmod 命令可以用于修改文件权限
2.2 Ubuntu安装软件
2.2.1 使用apt命令安装
🔗参考链接:https://zhuanlan.zhihu.com/p/270908077
apt 命令用法:
sudo apt install [pkg_name] -y # -y 自动选择是
更新软件列表:apt update -y
搜索软件: apt search 关键字
显示软件包详情:apt show 软件包名
安装软件:apt install 软件包名
升级指定软件:apt upgrade 软件包名
升级所有可以升级的软件:apt upgrade
卸载软件:apt remove 软件包名
卸载软件并移除软件依赖:apt autoremove 软件包名
卸载软件并删除配置文件:apt remove 软件包名 --purge
在终端占直接运行命令就可以安装,比如使用下面的命令安装 pkg_name
2.2.2 dpkg安装deb包
dpkg命令用法:
sudo dpkg -i package.deb

2.2.3 make install源代码安装
如果要使用make安装的话,那么必须得安装build-essential这个依赖包,安装方法已经在前面说过了。在安装完毕以后,我们就可以进行源码安装。
源码安装大致可以分为三步骤:配置(./configure)–> 编译(sudo make) –> 安装(sudo make install)。
配置:这是编译源代码的第一步,通过 ./configure 命令完成。执常用的选项有 --prefix=PREFIX,用以指定程序的安装位置。更多的选项可通过 --help 查询。也有某些程序无需执行此步。
编译:一旦配置通过,可即刻使用 make 指令来执行源代码的编译过程。
安装:如果编译没有问题,那么执行 sudo make install 就可以将程序安装到系统中了。
下面以安装nagios为例进行说明
//1.解压缩
tar -zxf nagios-4.0.2.tar.gz
//2.进入目录
cd nagios-4.0.2
//3.配置,指定安装目录
./configure --prefix=/usr/local/nagios
//4.编译
make all
//5.安装
make install && make install-init && make install-commandmode && make install-config
2.3 Ubuntu之常用指令
打开终端:使用快捷键 Ctrl+Alt+T
鱼香ROS的一键安装命令
wget http://fishros.com/install -O fishros && . fishros
2.3.1 ls命令(查看文件)
就是 list 的缩写,通过 ls 命令不仅可以查看 linux 文件夹包含的文件,而且可以查看文件权限(包括目录、文件夹、文件权限)查看目录信息等等。
ls -a 列出目录所有文件,包含以.开始的隐藏文件
ls -l 除了文件名之外,还将文件的权限、所有者、文件大小等信息详细列出来
2.3.2 cd 命令(进入文件夹)
cd(changeDirectory) 命令语法:
cd [目录名]
2.3.3 pwd 命令(查看当前工作路径)
pwd 命令用于查看当前工作目录路径。
# 查看当前路径
pwd
# 查看软链接的实际路径
pwd -P
2.3.4 mkdir 命令(创建文件夹)
"""
可用选项:
-m : 对新建目录设置存取权限,也可以用 chmod 命令设置;
-p : 可以实现多级创建目录。
"""
# 当前工作目录下创建名为 t的文件夹
mkdir t
# 在 tmp 目录下创建路径为 test/t1/t 的目录,若不存在,则创建:
mkdir -p /tmp/test/t1/t
2.3.5 rm 命令(删除命令)
删除一个目录中的一个或多个文件或目录,如果没有使用 -r 选项,则 rm 不会删除目录。如果使用 rm 来删除文件,通常仍可以将该文件恢复原状。
rm [选项] 文件…
# 删除任何 .log 文件,删除前逐一询问确认:
rm -i *.log
# 删除 test 子目录及子目录中所有档案删除,并且不用一一确认:
rm -rf test
# 删除以 -f 开头的文件
rm -- -f*
2.3.6 mv命令(移动文件)
移动文件或修改文件名,根据第二参数类型(如目录,则移动文件;如为文件则重命令该文件)。
当第二个参数为目录时,第一个参数可以是多个以空格分隔的文件或目录,然后移动第一个参数指定的多个文件到第二个参数指定的目录中。
# 将文件 test.log 重命名为 test1.txt
mv test.log test1.txt
# 将文件 log1.txt,log2.txt,log3.txt 移动到根的 test3 目录中
mv llog1.txt log2.txt log3.txt /test3
# 将文件 file1 改名为 file2,如果 file2 已经存在,则询问是否覆盖
mv -i log1.txt log2.txt
# 移动当前文件夹下的所有文件到上一级目录
mv * ../
2.3.7 cp 命令(复制文件)
将源文件复制至目标文件,或将多个源文件复制至目标目录。
cp a.txt /test/
3 Ubuntu之常用软件
直接参考鱼香ROS2的博客即可
ROS2前置教程 | 玩转Ubuntu之常用软件
如:VsCode、中文输入法、微信等
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!