硬件基础-DC-DC
1.BUCK原理
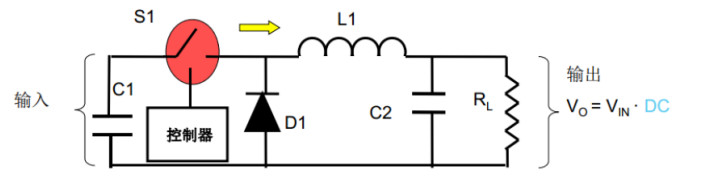
开关管 VS 开通时,能量一部分储存在电感L中,一 部分供给输出;VS关断时,L通过二极管VD 为输出端提供能量。
状态一:当S1闭合时,输入的能量从电容C1,通过S1→电感器LI→电容器C2→负载RL供电,此时电感器L1同时也在储存能量,可以得到加在L1上的电压为:Vin-Vo=L*di/dton。状态二:当S2关断时,能量不再是从输入端获得,而是通过续流回路,从电感器L1存储的能量→电容C2→负载RL→二极管D1,此时可得式子:L*di/dtof=Vo,最后我们可以得出Vo/Vin=D,而Vo永远是小于Vin的,因为占空比D≤1。
各个器件的作用:
1、输入电容器(CI)用于使输入电压平稳:2、输出电容器(C2)负责使输出电压平稳:
3、续流二极管(D1)在开关开路时为电感器提供一条电流通路:
4、电感器(L1)用于存储即将传送至负载的能量。
2.BOOST
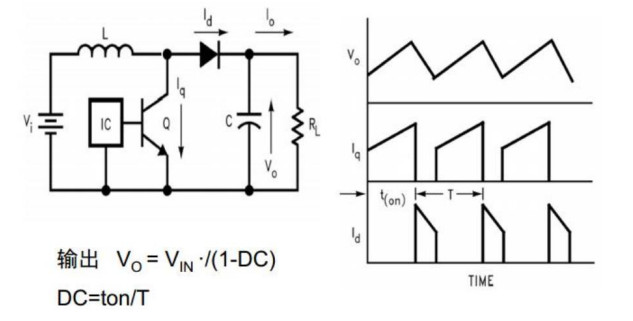
原理:当开关管导通的时候,输入的电压对电感充电,形成的回路是:输入Vi→电感L→开关管Q.
当开关管关断时,输入的能量和电感能量一起向输出提供能量,形成的回路是:输入Vi→电感L→二极管D→电容C→负载RL,因此这时候输出的电压肯定就比输入的电压高,从而实现升压。
3.BUCK-BOOST
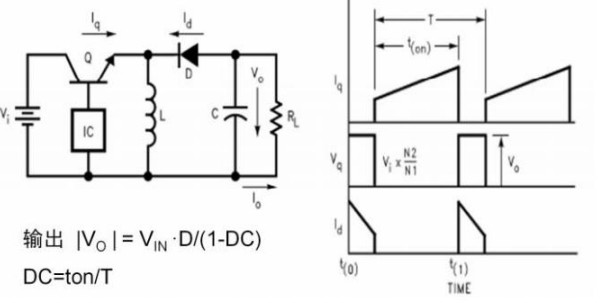
状态一:开关管开通,二极管D反向截止,电感器储能,电流回路为:输入Vin→开关管Q一电感器L
状态二:开关管关断,二极管D正向导通续流,电流回路为:电感器L→电容C→负载RL→二极管D
输出什么时候是升压,什么时候是降压呢?我们可以根据公式Vo=Vin x? D/(1-D)中知道,当D=0.5时,Vo=Vin:当D<0.5时,Vo<Vin:当D>0.5时,Vo>Vin。
4.反激
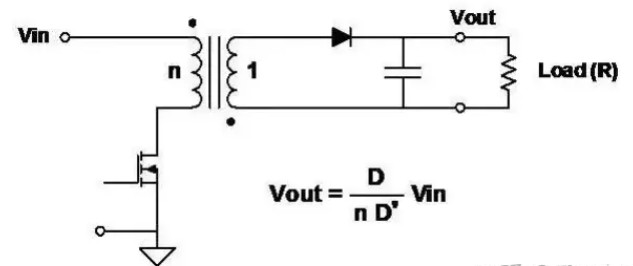
原理:当功率开关管 S 受到脉冲触发导通时, 电压 Vs 将加在变压器 T 的初级绕组 N1 上,并将能量储存在初级绕组中,初级绕组同 名端上为正电压,次级绕组的同名端和初级绕组相反,因此次级绕组输出的电压极性 将会使得输出端的整流二极管 D 截止,通过滤波电容 C 向负载供电;
当功率开关管 S 关断时,初级绕组 N1会产生反向的电动势,次级绕组 N2 上的电压极性也会发生相应的改变,从而使输出端整流二极管 D 得到正向偏置而导通,功率开关管在导通的 时候存储于反激式高频变压器初级绕组里的能量将传递至次级,对负载端供电。
如降压-升压电路一样工作,但是电感有两个绕组,同时作为变压器和电感
输出可以为正或为负,由线圈和二极管的极性决定。
输出电压可以大于或小于输入电压,由变压器的匝数比决定。
增加次级绕组和电路可以得到多个输出。
5.正激
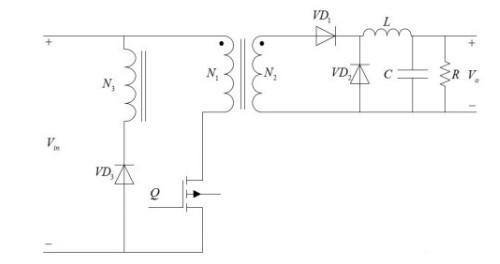
开关管 S 导通,二极管 VD1 导通,VD2、VD3关断。电源电压 Vin 加在变压器的原边绕组上,副边产生的感应电压为 (N2/ N1)*Vin
6.同步与非同步
区别
同步是采用通态电阻极低的专用功率MOSFET,来取代整流二极管以降低整流损耗的一项新技术。
它能大大提高DC/DC变换器的效率并且不存在由肖特基势垒电压而造成的死区电压。
同步的优缺点
MOSFET具有较低的电压降
MOSFES的导通电阻Rdson,一般都为毫欧级别,MOSFES在导通之后的压降比较低的。
效率较高
在相同的条件下,一般的MOS管的导通电压降远远小于普通肖特基二极管的正向导通压降的, MOS管的损耗功率是远远比二极管小的 。
需要额外的控制电路
Mos管需要驱动电路的,所以说同步的需要为MOS管额外添加一个控制电路,使得上下两个MOS管能够同步,而非同步的二极管是自然整流的,所以不需要额外添加驱动控制电路,
成本比较高
由于一般相同mos管的价格比二极管高,而且mos管还需要驱动电路,驱动ic。
非同步的优缺点
在输出电流变化的情况下,二极管的电压降相当恒定
效率低
因为二极管的电压降恒定,当流过二极管的电流很大的时候
比较便宜
大家都知道的二极管的价格肯定是比MOS的价格便宜的。
可采用较高的输出电压
因为在输出电压高时,二极管的正向导通压价所占的比重就很小,对效率的影响就比较低
同步与不同步选择
效率?? 成本 ??可靠性
7.电压控制模式
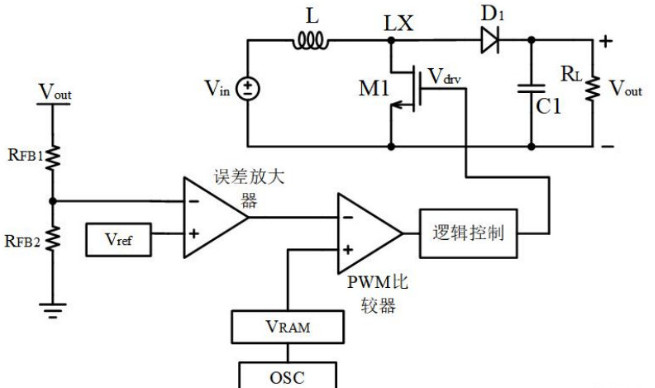
反馈电压VrB对输出电压进行采样,基准电压源提供高精度的参考电压Vref。VFB和Vref的差模信号输入误差放大器进行放大,再输入PWM比较器与三角波信号VRAM进行比较,最后得到方波信号,控制开关管的导通状态,稳定输出电压。
输出电压的抗噪声能力更强,占空比调节范围更大。
采用电压控制模式的功率级会产生 LC 双重极点,增加零点进行补偿。
当输入电压发生变化时,电压反馈环路无法及时反映电感电流的变化,只能等待输出电压发生变化来调节占空比,存在 RC 补偿网络的固延时,瞬态响应较差。
8.电流控制模式
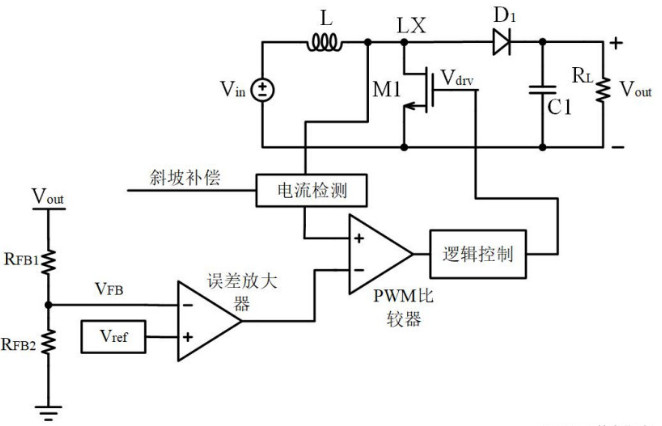
反馈电压VFB对输出电压进行采样,基准电压源提供高精度的参考电压Vref,VFB和Vref的差模信号输入误差放大器进行放大。在峰值电流控制模式中,内部电流环路通过采样电路得到电感电流的斜坡信号。当系统工作在连续导通模式下,且占空比接近或超过50%时,会出现次谐波不稳定,对电路的瞬态响应性能有严重影响,需要加入斜坡补偿。斜坡补偿信号与电感电流斜坡信号叠加后输入PWM比较器,保证系统稳定运行。
电流控制PWM的优点: (1)暂态闭环响应较快,对输入电压的变化和输出负载的变化的瞬态响应均快; (2)瞬时峰值电流限流功能; (3)输出电压的调整可与电压模式控制的输入电压前馈技术相媲美。
缺点:
(1)占空比大于50%的开环不稳定性,存在难以校正的峰值电流与平均电流的误差;
(2)容易发生次谐波振荡。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!