XIAO ESP32S3之物体检测加入视频流
一、前言
????????由于XIAO ESP32S3开发套件没有显示屏配件,因此加入http视频流功能,可通过浏览器请求ESP32S3上的视频流。
二、思路
1、XIAO ESP32S3启动后通过wifi连接到AP;
2、启动http服务器,注册get_mjpeg处理函数;
3、主任务将算法输出的图像压缩为jpg通过xMessageBuffer传递给get_mjpeg处理函数;
4、连接到同一个AP的终端启动浏览器输入XIAO ESP32S3的IP:8081获取视频流。
三、编写代码
1、加入文件
main文件夹下增加http_stream.cpp、http_stream.h文件

修改CMakeLists.txt文件,加入http_stream.cpp,内容如下:
idf_component_register(SRCS
app_main.cpp
fomo_mobilenetv2_model_data.cpp
http_stream.cpp
)2、主函数中加入连接AP和传递图像的功能
修改之后的app_main.cpp代码:
#include <inttypes.h>
#include <stdio.h>
#include "img_converters.h"
#include "core/edgelab.h"
#include "fomo_mobilenetv2_model_data.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/message_buffer.h"
#include "http_stream.h"
#define DEMO_WIFI_SSID "huochaigun"
#define DEMO_WIFI_PASS "12345678"
#define STORAGE_SIZE_BYTES 128*1024
static uint8_t *ucStorageBuffer;
StaticMessageBuffer_t xMessageBufferStruct;
#define kTensorArenaSize (1024 * 1024)
uint16_t color[] = {
0x0000,
0x03E0,
0x001F,
0x7FE0,
0xFFFF,
};
extern "C" void app_main(void) {
using namespace edgelab;
Device* device = Device::get_device();
device->init();
printf("device_name:%s\n", device->get_device_name() );
Network* net = device->get_network();
el_printf(" Network Demo\n");
uint32_t cnt_for_retry = 0;
net->init();
while (net->status() != NETWORK_IDLE) {
el_sleep(100);
if(cnt_for_retry++ > 50) {
net->init();
cnt_for_retry = 0;
}
}
el_printf(" Network initialized!\n");
cnt_for_retry = 0;
net->join(DEMO_WIFI_SSID, DEMO_WIFI_PASS);
while (net->status() != NETWORK_JOINED) {
el_sleep(100);
if(cnt_for_retry++ > 100) {
net->join(DEMO_WIFI_SSID, DEMO_WIFI_PASS);
cnt_for_retry = 0;
}
}
el_printf(" WIFI joined!\n");
// Display* display = device->get_display();
Camera* camera = device->get_camera();
// display->init();
camera->init(240, 240);
ucStorageBuffer = (uint8_t *)malloc( STORAGE_SIZE_BYTES );
if( ucStorageBuffer != NULL )
{
xMessageBuffer = xMessageBufferCreateStatic( STORAGE_SIZE_BYTES, ucStorageBuffer, &xMessageBufferStruct );
if( xMessageBuffer == NULL )
{
// There was not enough heap memory space available to create the
// message buffer.
printf("Create xMessageBuffer fail\n");
}
}
else
{
printf("malloc ucStorageBuffer fail\n");
}
start_http_stream();
auto* engine = new EngineTFLite();
auto* tensor_arena = heap_caps_malloc(kTensorArenaSize, MALLOC_CAP_SPIRAM | MALLOC_CAP_8BIT);
engine->init(tensor_arena, kTensorArenaSize);
engine->load_model(g_fomo_mobilenetv2_model_data, g_fomo_mobilenetv2_model_data_len);
auto* algorithm = new AlgorithmFOMO(engine);
while (true) {
el_img_t img;
camera->start_stream();
camera->get_frame(&img);
algorithm->run(&img);
uint32_t preprocess_time = algorithm->get_preprocess_time();
uint32_t run_time = algorithm->get_run_time();
uint32_t postprocess_time = algorithm->get_postprocess_time();
uint8_t i = 0u;
for (const auto& box : algorithm->get_results()) {
el_printf("\tbox -> cx_cy_w_h: [%d, %d, %d, %d] t: [%d] s: [%d]\n",
box.x,
box.y,
box.w,
box.h,
box.target,
box.score);
int16_t y = box.y - box.h / 2;
int16_t x = box.x - box.w / 2;
el_draw_rect(&img, x, y, box.w, box.h, color[++i % 5], 4);
}
el_printf("preprocess: %d, run: %d, postprocess: %d\n", preprocess_time, run_time, postprocess_time);
// display->show(&img);
uint8_t * jpg_buf;
size_t jpg_buf_len;
bool jpeg_converted = fmt2jpg( img.data, img.size, img.width, img.height, PIXFORMAT_RGB565, 30, &jpg_buf, &jpg_buf_len);
if( jpeg_converted == true )
{
// printf("jpg_buf_len:%d\n", jpg_buf_len );
if( xMessageBuffer != NULL )
{
xMessageBufferSend( xMessageBuffer, jpg_buf, jpg_buf_len , 0 );
}
free(jpg_buf);
}
camera->stop_stream();
}
delete algorithm;
delete engine;
}
说明:RGB转为jpg的图像质量为30,这样转换后的图形数据小,视频流更流畅。
3、http服务
http_stream.cpp代码:
#include <stdio.h>
#include <stdint.h>
#include <stddef.h>
#include <string.h>
#include "esp_log.h"
#include "esp_timer.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "freertos/semphr.h"
#include "freertos/event_groups.h"
#include "esp_http_server.h"
#include "freertos/message_buffer.h"
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
static const char *TAG = "http_stream";
MessageBufferHandle_t xMessageBuffer;
/**
* @brief jpg_stream_httpd_handler
* @param None
* @retval None
*/
esp_err_t jpg_stream_httpd_handler(httpd_req_t *req)
{
esp_err_t res = ESP_OK;
size_t _jpg_buf_size;
size_t _jpg_buf_len;
uint8_t * _jpg_buf;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame)
{
// last_frame = esp_timer_get_time();
}
_jpg_buf_size = 128*1024;
_jpg_buf = (uint8_t *)malloc( _jpg_buf_size );
if( _jpg_buf == NULL )
{
return res;
}
xMessageBufferReset( xMessageBuffer );
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK)
{
return res;
}
while(true)
{
size_t xReceivedBytes = xMessageBufferReceive( xMessageBuffer, _jpg_buf, _jpg_buf_size, pdMS_TO_TICKS(100) );
_jpg_buf_len = xReceivedBytes;
res = ESP_FAIL;
if( _jpg_buf_len > 0 )
{
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
else
{
continue;
}
if(res == ESP_OK)
{
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK)
{
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res != ESP_OK)
{
break;
}
}
free( _jpg_buf );
last_frame = 0;
return res;
}
httpd_uri_t uri_get_mjpeg = {
.uri = "/",
.method = HTTP_GET,
.handler = jpg_stream_httpd_handler,
.user_ctx = NULL};
/**
* @brief start http_stream.
* @param None.
* @retval None.
*/
httpd_handle_t start_http_stream( void )
{
printf("start_http_stream\n");
/* 生成默认的配置参数 */
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
config.server_port = 8081;
/* 置空 esp_http_server 的实例句柄 */
httpd_handle_t server = NULL;
/* 启动 httpd server */
if (httpd_start(&server, &config) == ESP_OK)
{
/* 注册 URI 处理程序 */
// httpd_register_uri_handler(server, &uri_get);
// httpd_register_uri_handler(server, &uri_get_1m);
httpd_register_uri_handler(server, &uri_get_mjpeg);
}
/* 如果服务器启动失败,返回的句柄是 NULL */
return server;
}
http_stream.h代码:
#ifndef __HTTP_STREAM_H__
#define __HTTP_STREAM_H__
extern MessageBufferHandle_t xMessageBuffer;
void start_http_stream( void );
#endif4、修改PSRAM的配置
由于增加的功能需要消耗很多RAM空间,所以需要将PSRAM充分利用起来。
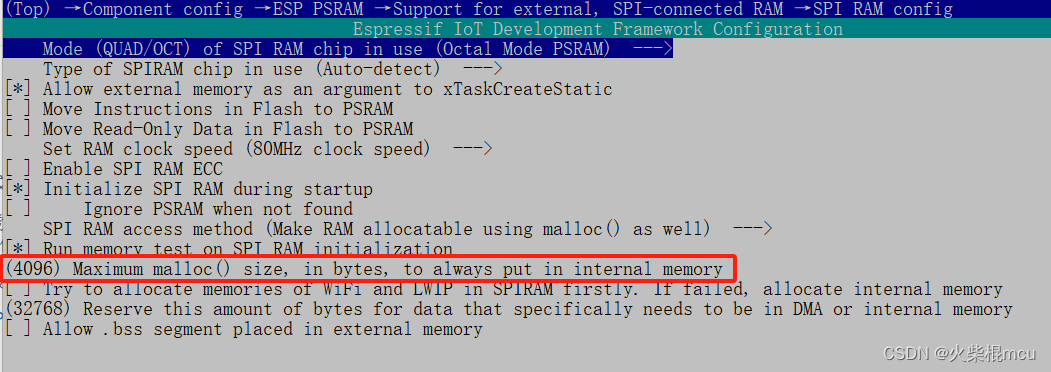
执行idf.py menuconfig,修改SPI RAM config,将malloc()阀值改小一些,这里改为4096字节,意思是使用malloc()分配内存时,大于4096字节则从外部PSRAM获取,配置如下:
?Component config ?--->
????????ESP PSRAM ?--->
????????????????SPI RAM config ?--->
????????????????????????(4096) Maximum malloc() size, in bytes, to always put in internal memory
四?、运行测试
1、编译、烧录、监视
idf.py build
idf.py flash
idf.py monitor连接AP的日志:
I (813) wifi:mode : sta (dc:54:75:d7:a2:10)
I (813) wifi:enable tsf
Network initialized!
I WAITING FOR IP...
I (2033) wifi:new:<11,0>, old:<1,0>, ap:<255,255>, sta:<11,0>, prof:1
I (2403) wifi:state: init -> auth (b0)
I (2413) wifi:state: auth -> assoc (0)
I (2423) wifi:state: assoc -> run (10)
W (2423) wifi:[ADDBA]rx delba, code:39, delete tid:5
I (2443) wifi:<ba-add>idx:0 (ifx:0, 90:76:9f:23:a3:58), tid:5, ssn:6, winSize:64
I (2583) wifi:connected with CMCC-2106, aid = 1, channel 11, BW20, bssid = 90:76:9f:23:a3:58
I (2583) wifi:security: WPA2-PSK, phy: bgn, rssi: -63
I (2583) wifi:pm start, type: 1
I (2583) wifi:dp: 1, bi: 102400, li: 3, scale listen interval from 307200 us to 307200 us
I (2583) wifi:set rx beacon pti, rx_bcn_pti: 0, bcn_timeout: 25000, mt_pti: 0, mt_time: 10000
I (2633) wifi:AP's beacon interval = 102400 us, DTIM period = 1
I (3583) esp_netif_handlers: edgelab ip: 192.168.10.104, mask: 255.255.255.0, gw: 192.168.10.1?可见IP地址为192.168.10.104。
2、浏览器获取视频流
同一个局域网的电脑启动浏览器,地址栏输入:192.168.10.104:8081,然后回车,浏览器会显示视频,图像分辨率为240*240,因为转换为jpg的质量设置的较低,所以不怎么清晰,下图为浏览器显示的图像:

 ?
?
有方框表示识别到了物体。
五、总结
此模型主要是对尺寸较小且颜色较深的物体能检测。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!