RT-Thread 内核基础(二)
RT-Thread启动流程
一般了解一份代码大多从启动部分开始。
RT-Thread支持多种平台和多种编译器,而rtthread_startup()函数是RT-Thread规定的统一启动入口。
一般执行顺序是:系统先从启动文件开始运行,然后进入RT-Thread的启动函数rtthread_startup(),最后进入用户入口函数main()。
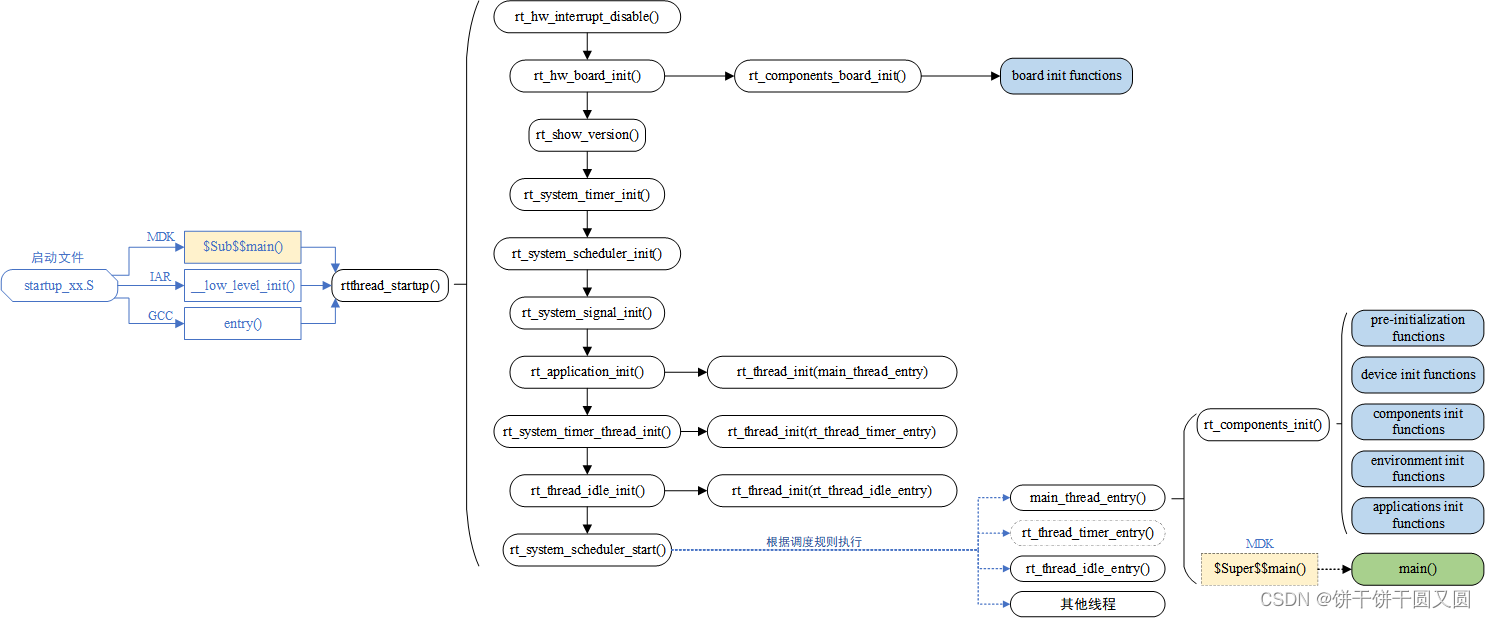
以 MDK-ARM 为例,用户程序入口为 main() 函数,位于 main.c 文件中。
系统启动后先从汇编代码startup_stm32f103xe.s开始运行,然后跳转到C代码,进行RT-Thread系统启动,最后进入用户程序入口函数main()。
为了在进入main()之前完成RT-Thread系统功能初始化,我们使用了MDK的扩展功能 S u b Sub Sub 和 和 和SuperKaTeX parse error: Can't use function '$' in math mode at position 10: 。 给main添加$?Sub的前缀符号作为一个新功能函数 S u b Sub Sub m a i n ,这个 main,这个 main,这个SubKaTeX parse error: Can't use function '$' in math mode at position 62: …行系统一系列初始化),再调用 $?Supermain 转到 main() 函数执行,这样可以让用户不用去管 main() 之前的系统初始化操作。
关于 S u b Sub Sub 和 和 和Super$$扩展功能的使用
这是Keil MDK编译器提供的两个扩展功能,可以用于扩展函数的功能。
- S u b Sub Sub$用于在函数执行之前执行一段代码
- S u p e r Super Super$用于调用原始函数
#include <stdio.h>
int main(void)
{
printf("Hello, world!\n");
return 0;
}
// 扩展 main 函数的功能,在 main 函数执行之前打印一条信息
void $Sub$$main(void)
{
printf("Starting program...\n");
}
// 调用原始的 main 函数
void $Super$$main(void)
{
main();
}

可以用于以下场景:
- 在函数执行之前执行一些初始化操作,例如硬件初始化、数据初始化等。
- 在函数执行之前进行一些检查,例如检查参数是否合法。
- 在函数执行之前记录日志。
启动流程
在components.c中定义的这段代码:
int $Sub$$main(void)
{
rtthread_startup();
return 0;
}
在这里 S u b Sub Sub$main函数调用了rtthread_startup()函数
int rtthread_startup(void)
{
rt_hw_interrupt_disable();
/* 板级初始化,需要在该函数内部进行系统堆的初始化 */
rt_hw_board_init();
/* 打印版本信息 */
rt_show_version();
/* 定时器初始化 */
rt_system_timer_init();
/* 调度器初始化 */
rt_system_scheduler_init();
#ifdef RT_USING_SIGNALS
/* 信号初始化 */
rt_system_signal_init();
#endif
/* 由此创建一个用户 main 线程 */
rt_application_init();
/* 定时器线程初始化 */
rt_system_timer_thread_init();
/* 空闲线程初始化 */
rt_thread_idle_init();
/* 启动调度器 */
rt_system_scheduler_start();
/* 不会执行至此 */
return 0;
}
这部分启动代码,大致可以分为四个部分:
(1)初始化与系统相关的硬件;
(2)初始化系统内核对象,例如定时器、调度器、信号;
(3)创建 main 线程,在 main 线程中对各类模块依次进行初始化;
(4)初始化定时器线程、空闲线程,并启动调度器。
启动调度器之前,系统所创建的线程在执行 rt_thread_startup() 后并不会立马运行,它们会处于就绪状态等待系统调度;待启动调度器之后,系统才转入第一个线程开始运行,根据调度规则,选择的是就绪队列中优先级最高的线程。
rt_hw_board_init()中完成系统时钟设置,为系统提供心跳、串口初始化,将系统输入输出终端绑定到这个串口,后续系统运行信息就会从这个串口打印出来。
main() 函数是 RT-Thread 的用户代码入口,用户可以在 main() 函数里添加自己的应用。
int main(void)
{
/* user app entry */
return 0;
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!