DWA(dynamic window approach)算法学习
系列文章目录
弗洛伊德算法(Floyd)和路径平滑弗洛伊德算法(Smooth Floyd)学习-CSDN博客
目录
前言
在机器人的路径规划中少不了DWA算法,学习!!!
DWA动态窗口法的原理及应用:The Dynamic Window Approach to Collision Avoidance - 知乎 (zhihu.com)
自动驾驶决策规划算法—DWA 动态窗口法 - 知乎 (zhihu.com)?
动态窗口法(Dynamic Window Approach, DWA)是一种避障规划方法,DWA算法通过对速度空间施加约束以确保动力学模型和避障的要求,在速度空间中搜索机器人最优控制速度,最终实现快速安全地到达目的地。
DWA算法的实现主要由两部分组成:?1.减小速度空间2.定义目标函数,并最大化目标函数
搜索空间?—减小速度搜索空间
通过施加弧线轨迹、允许速度、滑动窗口约束以减小搜索空间。
-
弧线轨迹 Circular trajectories
在原论文中,作者对简化了机器人的运动学模型,并得出了机器人运动轨迹可由一系列弧线和直线组成。所以,作者将速度空间约束在由机器人的平移速度和旋转速度(v,w)组成的二维速度搜索空间。 -
允许速度 Admissible velocities
允许速度(Admissible velocities)确保机器人可以在障碍前停下,最大的允许速度取决于当前轨迹距最近障碍的距离dist(v,w)。允许速度集被定义为:
下图中展示了Vs,Va速度空间:
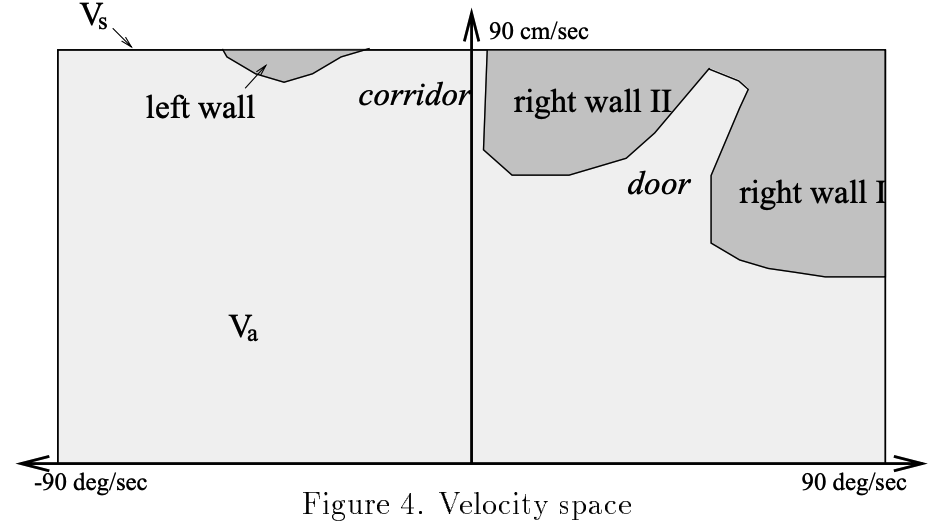
-
滑动窗口 Dynamic window
考虑到机器人存在加速度限制,搜索空间被限定动态窗口Vd中(在下一个规划间隔可达到的速度),具体如下:
其中,v˙,w˙表示机器人的加速度。
最终的搜索空间:Vr=Vs∩Va∩Vd,如下图所示: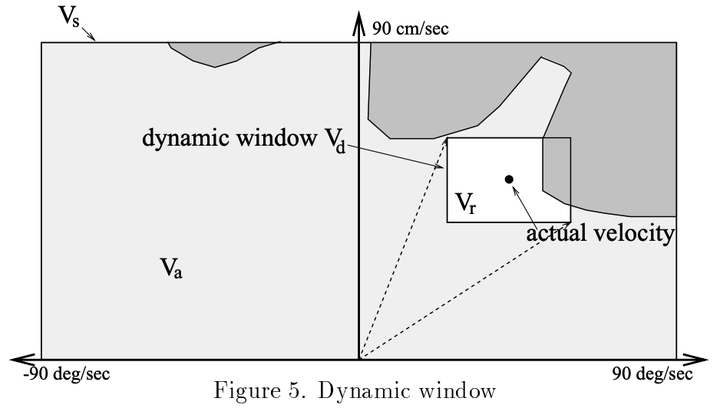
优化过程?—最大化目标函数
目标函数考虑了方位角、安全距离和速度:
- 方位角 Target heading
方位角项heading(v,w)可确保机器人在运动过程中快速对准目标点。 - 安全距离 Clearance
dist(v,w)确保机器人不发生任何碰撞 - 速度 Velocity
速度项Velocity(v,w)可确保机器人尽快到达目标点
目标函数被定义为:

其中,?,?
?,?
??可以根据需求调整。这三个指标是目标函数的重要组成部分,缺一不可。仅使clearance和velocity最大化,机器人始终在无障碍空间运动,但不会有向目标位置移动的趋势。单独最大化heading,机器人很快就会被阻碍其前进的第一个障碍所阻挡,无法在其周围移动。通过组合三个指标,机器人在上述限制条件下能够快速地绕过碰撞,同时朝着目标方向运动。
算法实现
具体的DWA算法参考:https://github.com/AtsushiSakai/PythonRoboticsGifsplanning
函数讲解
-
动态窗口
创建动态窗口def calc_dynamic_window(x, config): """ calculation dynamic window based on current state x """ # Dynamic window from robot specification Vs = [config.min_speed, config.max_speed, -config.max_yaw_rate, config.max_yaw_rate] # Dynamic window from motion model Vd = [x[3] - config.max_accel * config.dt, x[3] + config.max_accel * config.dt, x[4] - config.max_delta_yaw_rate * config.dt, x[4] + config.max_delta_yaw_rate * config.dt] # [v_min, v_max, yaw_rate_min, yaw_rate_max] dw = [max(Vs[0], Vd[0]), min(Vs[1], Vd[1]), max(Vs[2], Vd[2]), min(Vs[3], Vd[3])] return dw -
计算动态窗口内最优速度和最优轨迹
- 在动态窗口dw中采样并计算可能的轨迹,并求解各条轨迹的目标函数
- 选取令目标函数最小化(最小化指标,即对每个指标取倒数)的轨迹作为最优轨迹
def calc_control_and_trajectory(x, dw, config, goal, ob): """ calculation final input with dynamic window """ x_init = x[:] min_cost = float("inf") best_u = [0.0, 0.0] best_trajectory = np.array([x]) # evaluate all trajectory with sampled input in dynamic window for v in np.arange(dw[0], dw[1], config.v_resolution): # v_resolution: speed interval for y in np.arange(dw[2], dw[3], config.yaw_rate_resolution): # yaw_rate_resolution: yaw_rate interval trajectory = predict_trajectory(x_init, v, y, config) # calc cost to_goal_cost = config.to_goal_cost_gain * calc_to_goal_cost(trajectory, goal) speed_cost = config.speed_cost_gain * (config.max_speed - trajectory[-1, 3]) ob_cost = config.obstacle_cost_gain * calc_obstacle_cost(trajectory, ob, config) final_cost = to_goal_cost + speed_cost + ob_cost # search minimum trajectory if min_cost >= final_cost: min_cost = final_cost best_u = [v, y] best_trajectory = trajectory if abs(best_u[0]) < config.robot_stuck_flag_cons \ and abs(x[3]) < config.robot_stuck_flag_cons: # to ensure the robot do not get stuck in # best v=0 m/s (in front of an obstacle) and # best omega=0 rad/s (heading to the goal with # angle difference of 0) best_u[1] = -config.max_delta_yaw_rate return best_u, best_trajectory -
目标函数
- 方位角目标函数
def calc_to_goal_cost(trajectory, goal): """ calc to goal cost with angle difference """ dx = goal[0] - trajectory[-1, 0] dy = goal[1] - trajectory[-1, 1] error_angle = math.atan2(dy, dx) cost_angle = error_angle - trajectory[-1, 2] cost = abs(math.atan2(math.sin(cost_angle), math.cos(cost_angle))) return cost- 障碍目标函数
计算机器人与最近障碍的距离
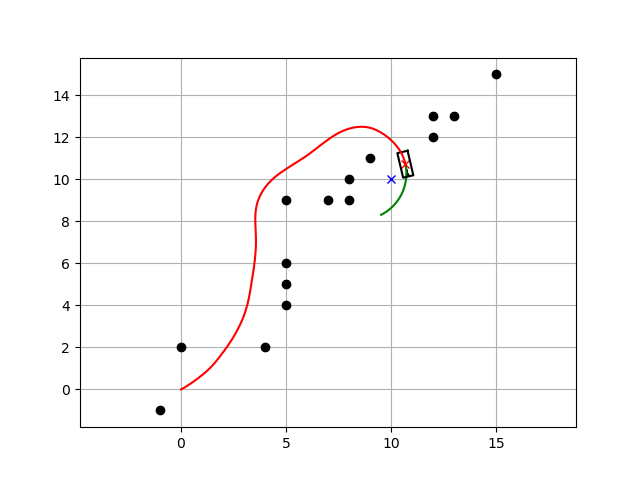
def calc_obstacle_cost(trajectory, ob, config): """ calc obstacle cost inf: collision """ ox = ob[:, 0] oy = ob[:, 1] dx = trajectory[:, 0] - ox[:, None] dy = trajectory[:, 1] - oy[:, None] # r = sqrt(dx^2 + dy^2) r = np.hypot(dx, dy) if config.robot_type == RobotType.rectangle: yaw = trajectory[:, 2] rot = np.array([[np.cos(yaw), -np.sin(yaw)], [np.sin(yaw), np.cos(yaw)]]) rot = np.transpose(rot, [2, 0, 1]) local_ob = ob[:, None] - trajectory[:, 0:2] local_ob = local_ob.reshape(-1, local_ob.shape[-1]) local_ob = np.array([local_ob @ x for x in rot]) local_ob = local_ob.reshape(-1, local_ob.shape[-1]) upper_check = local_ob[:, 0] <= config.robot_length / 2 right_check = local_ob[:, 1] <= config.robot_width / 2 bottom_check = local_ob[:, 0] >= -config.robot_length / 2 left_check = local_ob[:, 1] >= -config.robot_width / 2 if (np.logical_and(np.logical_and(upper_check, right_check), np.logical_and(bottom_check, left_check))).any(): return float("Inf") elif config.robot_type == RobotType.circle: if np.array(r <= config.robot_radius).any(): return float("Inf") min_r = np.min(r) return 1.0 / min_r # OK最终机器人规划避障轨迹:
总结
机器人轨迹规划的基本算法,之后做实验跑一跑!!!之后还要研究下欧几里得距离转换算法(Euclidean Distance Transform, EDT),建立EDT梯度图衡量障碍物代价以优化障碍物判断优化。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!