定时器TIM HAL库+cubeMX(上)

定时器时钟源APB1 36MHz?
?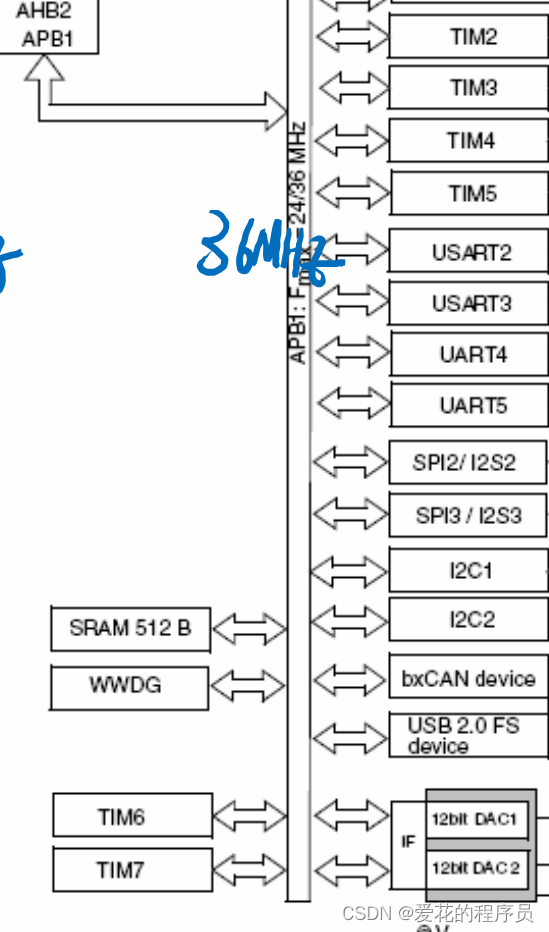
一.基本定时器
1.基本框图
 2.溢出时间计算
2.溢出时间计算

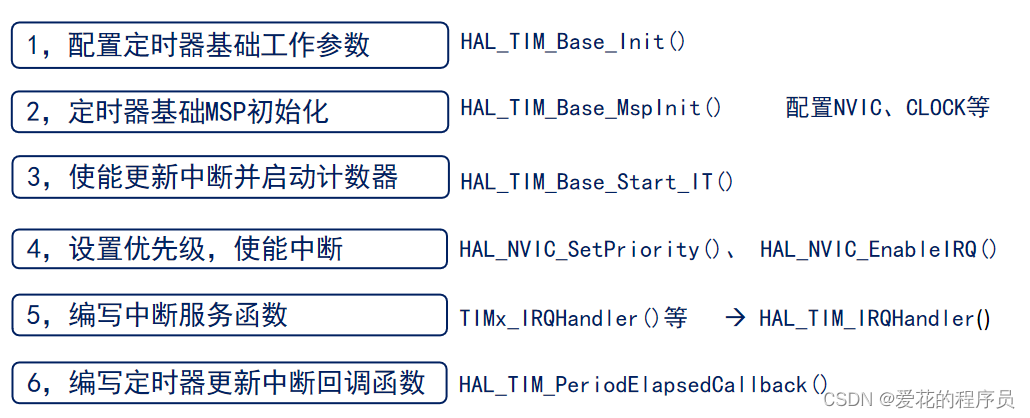
3.配置定时器步骤?

TIM_HandleTypeDef g_timx_handle;
/* 定时器中断初始化函数 */
void btim_timx_int_init(uint16_t arr, uint16_t psc)
{
g_timx_handle.Instance = TIM6;
g_timx_handle.Init.Prescaler = psc;
g_timx_handle.Init.Period = arr;
HAL_TIM_Base_Init(&g_timx_handle);
HAL_TIM_Base_Start_IT(&g_timx_handle);
}
/* 定时器基础MSP初始化函数 */
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM6)
{
__HAL_RCC_TIM6_CLK_ENABLE();
HAL_NVIC_SetPriority(TIM6_IRQn, 1, 3);
HAL_NVIC_EnableIRQ(TIM6_IRQn);
}
}
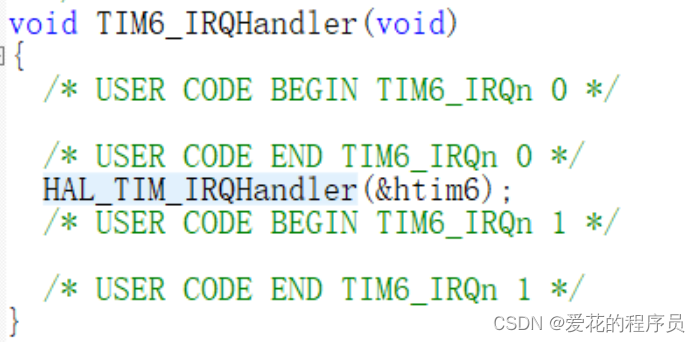
/* 定时器6中断服务函数 */
void TIM6_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_timx_handle);
}
/* 定时器溢出中断中断回调函数 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM6)
{
LED0_TOGGLE();
}
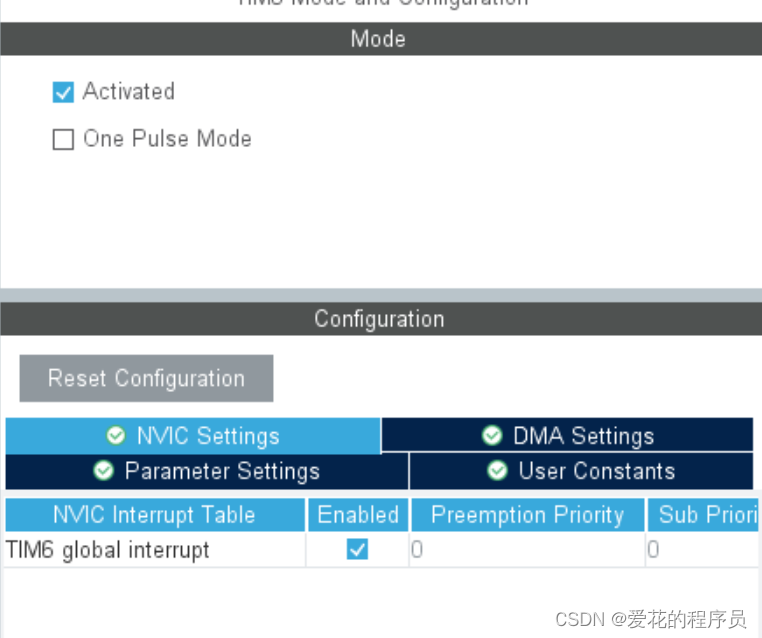
}4.cubeMX配置基本定时器
使用定时器6,实现500ms定时器更新中断,在中断里翻转LED0。PSC=7199,ARR=4999、

单脉冲模式(One Pulse Mode): 开启这个模式后,只要触发了一次溢出标志,就会自动把计数使能关掉,想再次触发需要手动开启计数使能。所以如果想要实现周期触发事件,就不用勾选这个选项。
预分频系数(Prescaler): 新手杀手之一,虽然这里写的是预分频系数,但实际设置的值是预分频系数-1,也就是需要10分频时,需要设置9。
计数模式(Counter Mode): 计数模式,也称计数方向,决定定时器是递增计数还是递减计数。如果只是用来定时,那递增或递减都没什么影响。
计数周期(Counter Period): 就是当计数值达到计数周期值时,会触发一个溢出标志,新手杀手之二,因为计数是从0开始计的,所以如果想要实现10次计数,这里只需要设置9即可。
自动重装载(auto-reload preload): 如果选择了自动重装载,那么在触发了一次溢出标志后,定时器会自动将计数清0并重新计数。
触发事件选择(Trigger Event Selection): 可以选择通过UG标志、计数使能、溢出标志来触发输出,这个一般用不上。?
步骤1.图形化配置
 ? ?
? ?
步骤2.重写虚函数
进入HAL_TIM_IRQHandler(&htim2)函数,这里面的代码很长,就是不同的中断类型,进入不同的中断回调函数,这里找到 HAL_TIM_PeriodElapsedCallback(htim);
? ?
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ???
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ???
步骤3.在main函数里面添加
/* 使能更新中断 */
HAL_TIM_Base_Start_IT(&htim6);
/* 启动定时器 */
HAL_TIM_Base_Start(&htim6);二.通用定时器
16位递增、递减、中心对齐计数器(计数值:0~65535) 16位预分频器(分频系数:1~65536) 可用于触发DAC、ADC 在更新事件、触发事件、输入捕获、输出比较时,会产生中断/DMA请求 4个独立通道,可用于:输入捕获、输出比较、输出PWM、单脉冲模式 使用外部信号控制定时器且可实现多个定时器互连的同步电路 支持编码器和霍尔传感器电路等
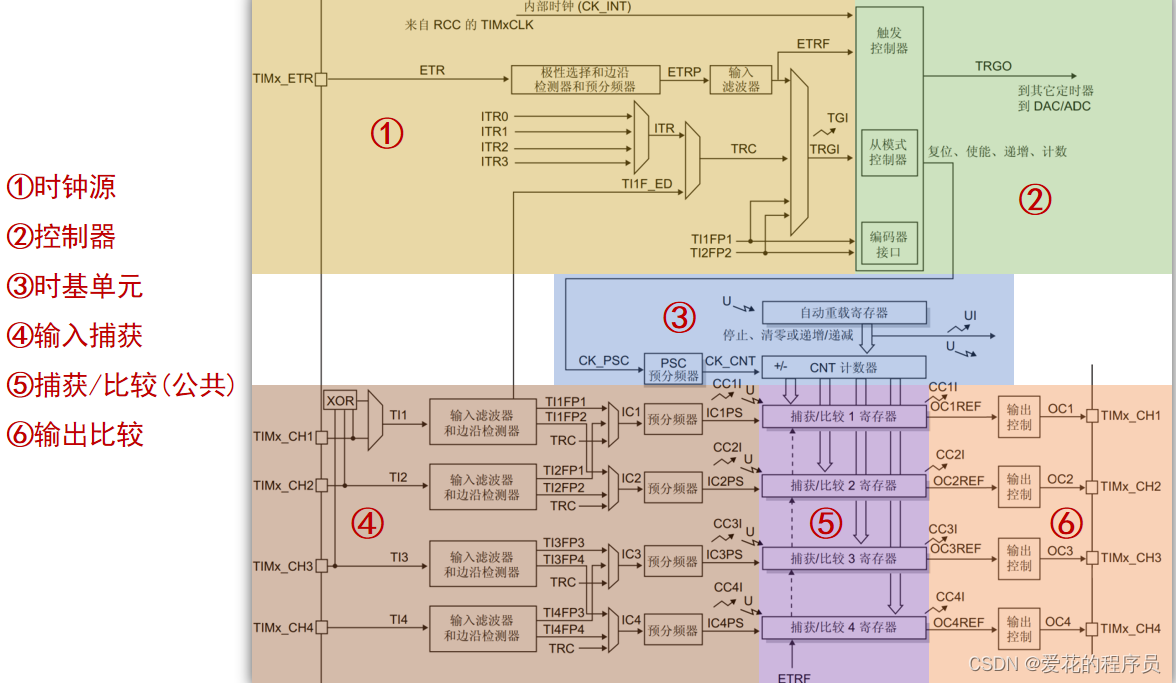
?①内部时钟(CK_INT),来自外设总线APB提供的时钟? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?②外部时钟模式1:外部输入引脚(TIx),来自定时器通道1或者通道2引脚的信号? ? ? ? ? ? ? ? ? ? ? ? ? ?③外部时钟模式2:外部触发输入(ETR),来自可以复用为TIMx_ETR的IO引脚? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?④内部触发输入(ITRx),用于与芯片内部其它通用/高级定时器级联
实验一.通用计数器闪烁

代码没有使用?HAL_TIM_IRQHandler()公用函数来处理,而是直接通过判断中断位的方式。
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
if(__HAL_TIM_GET_FLAG(&htim3,TIM_FLAG_UPDATE)!=RESET)
{
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
__HAL_TIM_CLEAR_FLAG(&htim3,TIM_IT_UPDATE);
}
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}实验二.PWM输出实验
 ?1.定时器配置?
?1.定时器配置?


typedef struct
{
uint32_t OCMode; /* 输出比较模式选择 */
uint32_t Pulse; /* 设置比较值 */
uint32_t OCPolarity; /* 设置输出比较极性 */
uint32_t OCNPolarity; /* 设置互补输出比较极性(高级) */
uint32_t OCFastMode; /* 使能或失能输出比较快速模式(用的少) */
uint32_t OCIdleState; /* 空闲状态下OC1输出(互补输出高级TIM) */
uint32_t OCNIdleState; /* 空闲状态下OC1N输出(互补输出高级TIM) */
} TIM_OC_InitTypeDef;
2.实验要求?

 LED0接在PB5,PB5可以重定义TIM3_Ch2
LED0接在PB5,PB5可以重定义TIM3_Ch2
void MX_TIM3_Init(void); //通用定时器3初始化函数
HAL_StatusTypeDef HAL_TIM_Base_Init(TIM_HandleTypeDef *htim); //HAL库定时器初始化函数
/*PWM配置函数*/
HAL_StatusTypeDef HAL_TIM_PWM_ConfigChannel(TIM_HandleTypeDef *htim,
const TIM_OC_InitTypeDef *sConfig,
uint32_t Channel);
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle); //相关时钟配置函数
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle); //重映射功能配置函数
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel); //PWM使能函数
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, ledRpwmval); //这是一个宏定义,用于修改CCRx改变占空比
TIM_HandleTypeDef g_timx_pwm_chy_handle;
/* 通用定时器PWM输出初始化函数 */
void gtim_timx_pwm_chy_init(uint16_t arr, uint16_t psc)
{
TIM_OC_InitTypeDef timx_oc_pwm_chy;
g_timx_pwm_chy_handle.Instance = TIM3;
g_timx_pwm_chy_handle.Init.Prescaler = psc;
g_timx_pwm_chy_handle.Init.Period = arr;
g_timx_pwm_chy_handle.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_PWM_Init(&g_timx_pwm_chy_handle);
timx_oc_pwm_chy.OCMode = TIM_OCMODE_PWM1;
timx_oc_pwm_chy.Pulse = arr / 2;
timx_oc_pwm_chy.OCPolarity = TIM_OCPOLARITY_LOW;
HAL_TIM_PWM_ConfigChannel(&g_timx_pwm_chy_handle, &timx_oc_pwm_chy, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&g_timx_pwm_chy_handle, TIM_CHANNEL_2);
}
/* 定时器输出PWM MSP初始化函数 */
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_TIM3_CLK_ENABLE();
gpio_init_struct.Pin = GPIO_PIN_5;
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 推挽复用 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(GPIOB, &gpio_init_struct);
__HAL_RCC_AFIO_CLK_ENABLE();
__HAL_AFIO_REMAP_TIM3_PARTIAL();
}
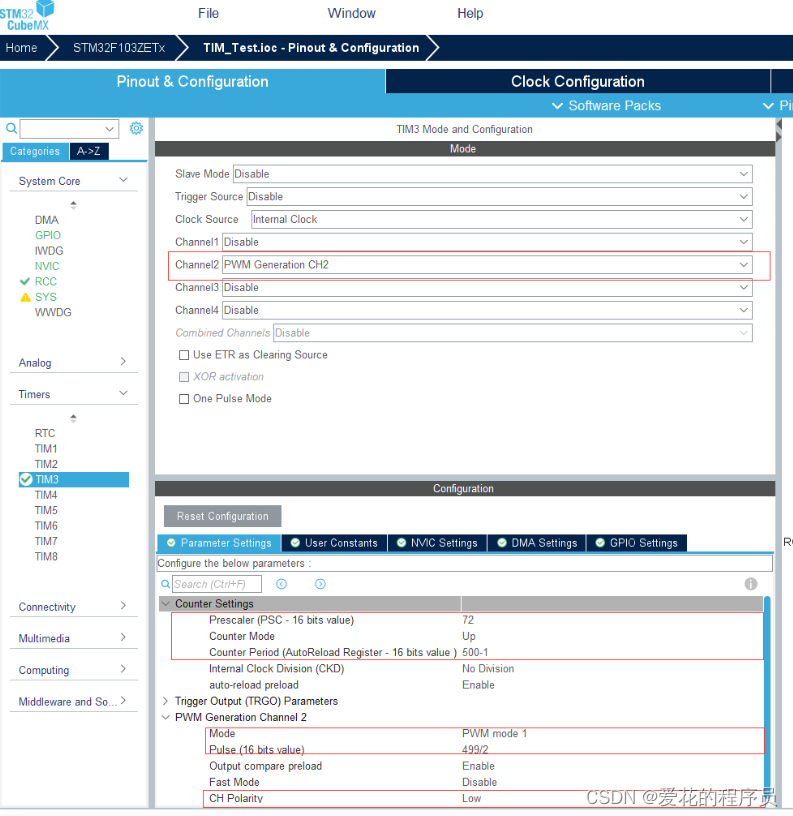
}3.配置cubeMX
 ?
?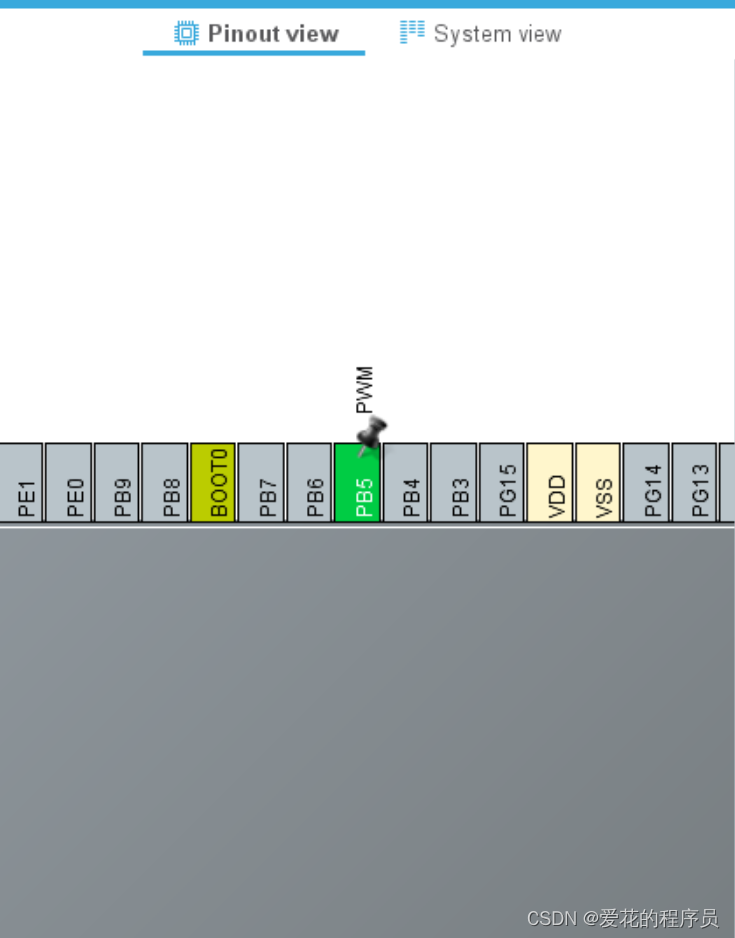
1.配置重定义,这里直接在PB5上选择TIM3_ch2,系统直接给你重定义好? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
2.配置2KHz为例,首先Tclk为输入时钟频率72MHz,我们首先带入psc = 72-1方便计算,则算出arr = 500-1。
3.接下来配置模式为PWM模式1,这里的Pulse即为我们CNT,将其设置为499/2,即控制我们的占空比为50%(默认一开始的),因为我们的CNT恰好为ARR的一半,最后是设置输出比较极性为低电平有效,因为板子上的LED灯需要接通低电平才亮。? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
4.我们需要在main添加使能函数?
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);5.main函数里面代码
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
uint16_t ledRpwmval = 0;//控制LED的pwm重装载设定值
uint8_t dir = 1;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
HAL_Delay(10);
if(dir)
ledRpwmval++;
else
ledRpwmval--;
if(ledRpwmval > 500)
dir = 0;
if(0 == ledRpwmval)
dir = 1;
//修改比较值控制占空比
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, ledRpwmval);
/* USER CODE BEGIN 3 */
}本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!