GNSS定位中常见的几大坐标系统及其相互转换
目录
一、坐标系概念
- 坐标系统是描述物体空间位置的参照系统,通过定义特定基准及其参数形式来实现。 坐标是描述位置的一组数值,为了描述或确定位置,必须建立坐标系统,
- 坐标只有存在于某个坐标系统中才有实际的意义。
- GNSS卫星在环绕地球的轨道上运行,GNSS测量大部分在地球上进行,为了把GNSS观测量(距离)描述成GNSS轨道(卫星位置)和测站位置的函数,必须定义适当的坐标系统。
- 坐标系基本分类:
- 天球坐标系:瞬时极天球坐标系、平天球坐标系、协议天球坐标系、国际天球参考系
- 地球坐标系:参心坐标系、地心参考系、站心坐标系、国际地球参考系
二、常见的几大坐标系统
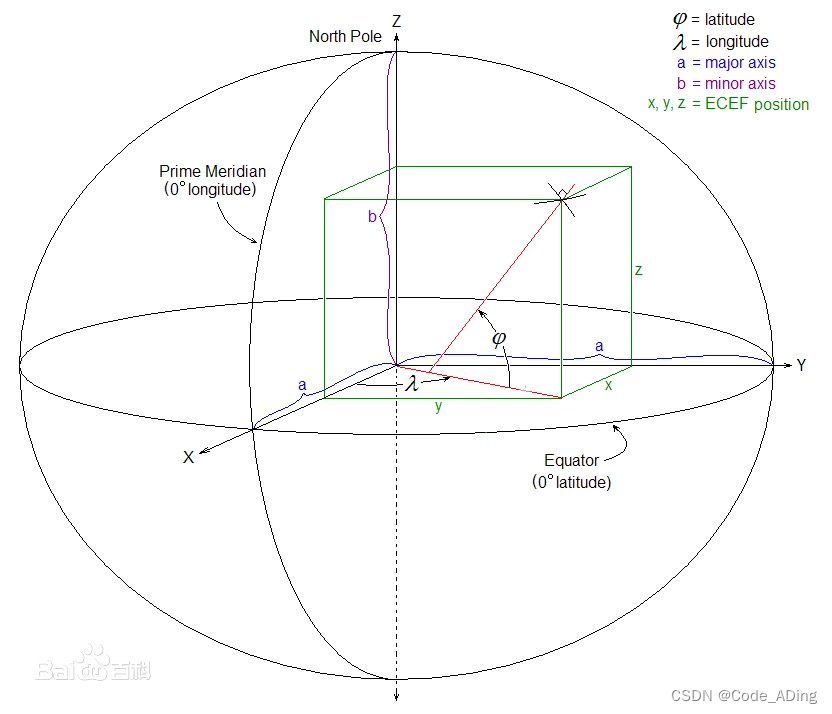
1.ECEF坐标系
即地心地固坐标系(Earth-Centered,Earth-Fixed,简称ECEF),简称地心坐标系。
是一种以地心为原点的地固坐标系(也称地球坐标系),是一种笛卡儿坐标系。
原点 O (0,0,0)为地球质心,Z 轴与地轴平行指向北极点,X轴指向本初子午线与赤道的交点,Y轴垂直于XOZ平面(即东经90度与赤道的交点)构成右手坐标系。
其中,WGS-84坐标系和CGCS2000坐标系属于ECEF地心地固坐标系。
2.ENU坐标系
即站心坐标系,也叫做站点坐标系、大地站心地平坐标系、东-北-天坐标系ENU,英文名称是local Cartesian coordinates coordinate system,主要是用于需了解以观察者为中心的其他物体运动规律。
站心坐标系是以测站为原点的坐标系,即用准备好的基座来定点并进行观察和测量,一般用于施工工程。也用于需了解以观察者为中心的其他物体运动规律,如接收机可见GPS卫星的视角、方位角及距离等,需要用到站心坐标系。
分类:
- 站心直角坐标系
- ?定义:以站心(如GPS接收天线中心)为坐标系原点O,Z轴与椭球法线重合,向上为正(天向),y与椭球短半轴重合(北向),x轴与地球椭球的长半轴重合(东向)所构成的直角坐标系,称为当地东北天坐标系(ENU)。?? ? ?
- ?站心极坐标系
- ?定义:以站心为坐标极点O,以水平面(即xoy平面)为基准面,以东向轴(即x轴)为极轴,ρ为卫星到站点的距离,az为星视方向角(azimuth angle),el为星视仰角(elevation)。
? ?
?
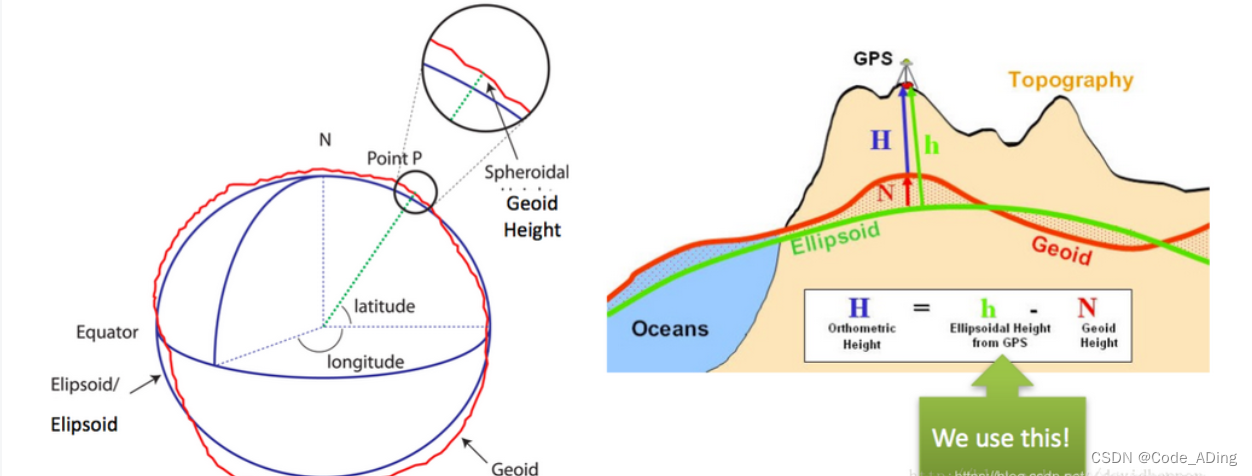
3.LLA坐标系
又称大地坐标系,经纬高坐标系(84坐标系)。是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
- 它包括地心大地坐标系和参心大地坐标系;
- 是大地测量中以参考椭球面为基准面建立起来的坐标系;
- 地面点的位置用大地经度、大地纬度和大地高度表示。大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据;
- 一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球;
- 参考椭球一旦确定,则标志着大地坐标系已经建立;
- 大地坐标系是一种伪地理坐标系。大地坐标系为右手系。

4.三个坐标系之间的相互转化关系
以WGS-84坐标系(LLA坐标系)为例,需要用到的参数示例:
| 参数 | WGS-84 |
|---|---|
| 基于椭球体的长半径 a | 6378137 m |
| 基于椭球体的极扁率 f | 1/298.257222101 |
| 地球自转角速度 We | 7.292115E-5 rad/s |
| 地球引力常数 | 3.986004418E14 m3/s2 |
| 光速 | 2.99792458E8 m/s |
(1)LLA坐标系转ECEF坐标系


LLA坐标系下的(lon,lat,alt)转换为ECEF坐标系下点(X,Y,Z)
两种形式:
第一种利用偏心率 e

或者:
第二种利用极扁率 f

其中,f为极扁率,N为基准椭球体的曲率半径:

(2)ECEF坐标系转LLA坐标系
ECEF坐标系下点(X,Y,Z)转换为LLA坐标系下的(lon,lat,alt):
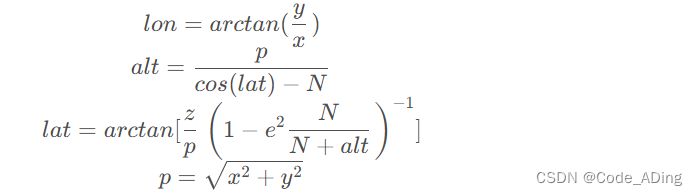
最初lon是未知的,可以假设为0,经过计算迭代之后就能收敛。
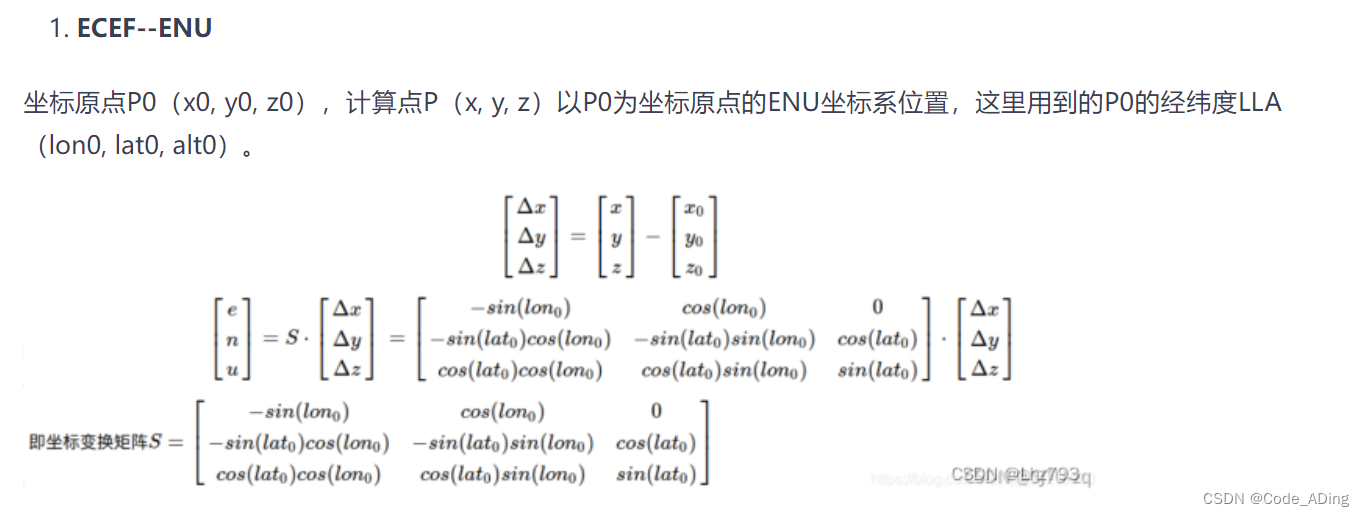
(3)ECEF坐标系转ENU坐标系


?上图中的的 S 矩阵就是(上图中有误):

具体可参考这篇论文中的描述(可以与上上图一一对应):?
(4)ENU坐标系转ECEF坐标系
S为单位正交矩阵

反之:
(5)LLA坐标系转ENU坐标系
上述可以看到,从LLA坐标系转换到enu坐标系有较多计算量,在考虑地球偏心率ee很小的前提下,可以做一定的近似公式计算:

(6)ENU坐标系转LLA坐标系
可先由ENU坐标系转换为ECEF坐标系,再由ECEF坐标系转换到LLA坐标系。
5.其他的一些坐标系
(1)ECI坐标系(地心惯性系)
在组合导航中常称作 i 系。原点为地球中心,x,y轴在地球赤道平面内,z轴为地球自转轴,指向北极,x轴指向春分点(赤道面与黄道面的交线再与天球相交的交点之一),春分点是天文测量中确定恒星时的起始点。惯性传感器如IMU的输出就是以该坐标系为参考基准的。地心惯性坐标系是一种准惯性坐标系,虽然其转动角速率相对理性惯性空间波动非常小,但它的线运动却不是理想匀速的。地心坐标系是不与地球固联的,它不随地球自转而转动。而地球坐标系和地球固连的,它与地球一起相对惯性坐标系以地球的自转角速度进行转动。
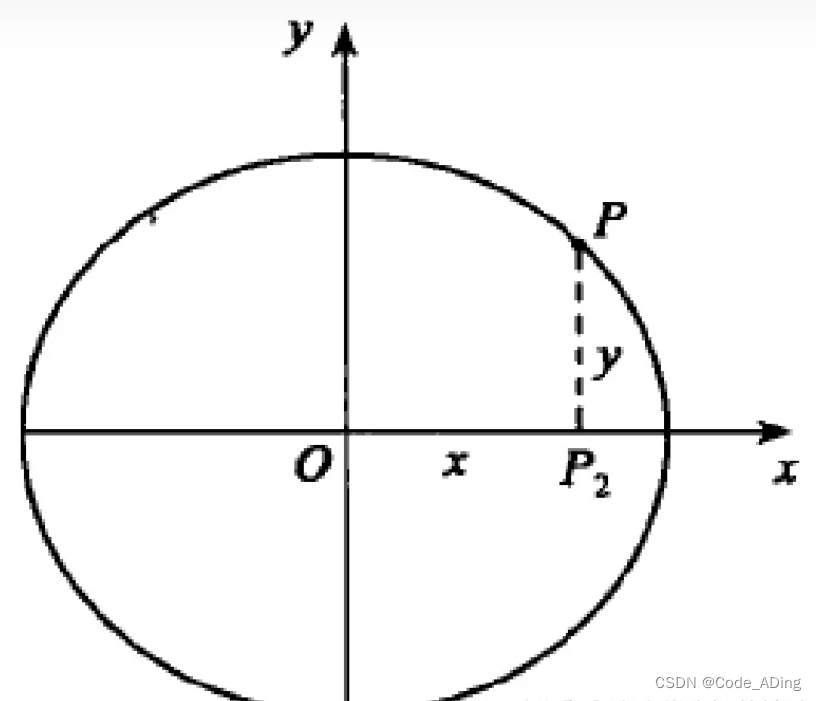
(2)子午面直角坐标系
如下图所示,设 P 点的大地经度为 L ,在过 P?点的子午面上,以子午圈椭圆中心为原点,建立(x,y)平面直角坐标系。在该坐标系中,用?(L,x,y)?表示 P?点的位置。
(3)天球坐标系
- 天球:以地球质心为中心,以无穷大为半径的假象球体;
- 天轴与天极:地球自转轴的延伸直线为天轴;天轴与天球的交点称为天极
- 天球赤道面与天球赤道:通过地球质心O 与天轴垂直的平面称为天球赤道面,天球赤道面与地球赤道面重合;天球赤道面与天球相交的大圆称为天球赤道
- 天球子午面与子午圈:包含天轴的平面,称为天球子午面;天球子午面与天球相交的大圆称为天球子午圈
- 时圈:通过天轴的平面与天球相交的大圆均称为时圈
- 黄道:地球公转的轨道面(黄道面)与天球相交的大圆称为黄道。黄道面与赤道面的夹角称为黄赤交角,约为23.5°
- 黄极:通过天球中心,且垂直于黄道面的直线与天球的交点,称为黄极 靠近北天极的交点称为北黄极,靠近南天极的交点称为南黄极
- 黄道与赤道的两个交点称为春分点和秋分点。视太阳在黄道上从南半球向北半球运动时,黄道与天球赤道的交点称为春分点
天球坐标系:原点位于地球质心, z轴指向北天极, x轴指向春分点, y轴垂直xoz平面
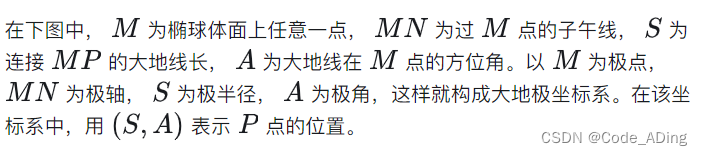
(4)大地极坐标系


(5)地心纬度坐标系


三、四大GNSS系统的坐标系统
- GPS星历所计算出来的卫星位置是 WGS-84 坐标系;
- GLONASS星历计算出来的卫星位置是 PZ-90 坐标系;
- GALILEO星历计算出来的卫星位置是 GTRE 坐标系;
- BDS星历计算出来的卫星位置是 BDCS 坐标(CGCS2000坐标系);
四、几个坐标系统"参考框架和系统"
1. GRS & GRF
大地测量参考系统(Geodetic Reference System,?GRS):
- 坐标参考系统:天球坐标系和地球坐标系
- 高程参考系统:以大地水准面为参照面的高程称为正高;以似大地水准面为参照面的高程系统称为正常高
- 重力参考系统:重力观测值的参考系统
大地测量参考框架(Geodetic Reference Frame,?GRF):它是大地测量参考系统的具体实现,是通过大地测量手段确定的固定在地面上的控制网(点)所构建的,分为坐标参考框架、高程参考框架、重力参考框架。
2. ITRS & ITRF
国际地球自转服务(International Earth Rotation Service,IERS)于1988年由国际大地测量学与地球物理联合会(IUGG)和国际天文学联合会(IAU)共同建立,用以取代国际时间局(BIH)的地球自转部分和原有的国际极移服务(IPMS)。根据创立时的委托协议,IERS任务主要有以下几个方面:
- 维持国际天球参考系统(International Celestial Reference System,ICRS)和框架(International Celestial Reference Frame,ICRF)
- 维持国际地球参考系统(International Terrestrial Reference System,ITRS)和框架(International Terrestrial Reference Frame,ITRF)
- 为当前应用和长期研究提供及时准确的地球自转参数(ERP)
IERS采用了多种技术手段进行观测和分析,来完成对上述参考框架和地球自转的监测。这些技术包括雷达干涉技术,甚长基线干涉(VLBI),激光测月(LLR),激光测卫(SLR),GPS,DORIS等
国际地球参考系统(International Terrestrial Reference System,ITRS)是一种协议地球参考系统,它的定义为:
- 原点为地心,并且是指包括海洋和大气在内的整个地球的质心
- 长度单位为米(m),并且是在广义相对论框架下的定义
- z 轴从地心指向 BIH1984.0?定义的协议地球极(CTP)
- x 轴从地心指向格林尼治平子午面与CTP赤道的交点
- y 轴与 xoy?平面垂直而构成右手坐标系
- 时间演变基准是使用满足无法整体旋转(NNR)条件的板块运动模型,用于描述地球各个块体随时间的变化。
ITRS 的建立和维持是由 IERS 全球观测网,以及观测数据经综合分析后的得到的站坐标和速度场来具体实现的,即国际地球参考框架?ITRF。
(1)?ITRF 参考系统
IGS精密星历基于 ITRF 参考框架,IGS 精密星历文件的头文件部分指出星历所采用的参考框架。
ITRF 由 IERS 提供,是国际地球参考系统(ITRS)的理想化实现。ITRF 的实现采用了 VLBI、SLR、GPS 和 DORIS 四种空间大地测量技术,对各类技术采集的数据进行综合处理,以整个地球(包含海洋及大气)的质量中心为坐标原点,以米为单位,方向初始值采用国际时间局指定的 1984.0 的方向,定向随着时间变动,采用相对于整个地球的水平板块运动无整体旋转的 NNR 条件。自 1988 年起,已经相继出现ITRF1988~ITRF2008 共计 12 个版本的参考框架,不久将会发布 ITRF2013 参考框架,ITRF 框架站点的位置和速度的精度不断提高。ITRF2005 与 ITRF2008 标志着目前 ITRF 日渐成熟,其中 ITRF2005 的参考历元为 J2000.0,ITRF2008 的参考历元为 J2005.0。但是实际上ITRF2008 基准定义与实现并非相同,ITRF2008 基准不以地心为原点,虽然可达到 cm级定位精度,但是离海平面上升等毫米级的地球动力学研究有一定差距。因此不断完善地球参考框架,建立毫米级地球参考框架是未来发展的必然趋势。
(2) ITRF 不同参考系统之间的转换
由于不同 ITRF 框架的参考历元与定义基准不一致,在导航定位解算中需要统一 ITRF参考系统。对于 ITRF 参考系统的统一,既要进行参考历元的统一,又要进行参考框架类型的统一。理论上统一参考框架后的结果与两类统一方式的先后顺序无关。选取 IGS提供的 ITRF 框架下全球 IGS 站点的坐标,采用布尔莎七参数转换模型,解算 ITRF 之间的转换参数如下图所示。

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!