Ubuntu20.04 上启用 VCAN 用作本地调试
2023-12-29 11:34:40
目录
当没有CAN设备时,可使用 Ubuntu 的虚拟 CAN 进行通讯测试。
一、启用本机的 VCAN
? 1.1 加载本机的 vcan
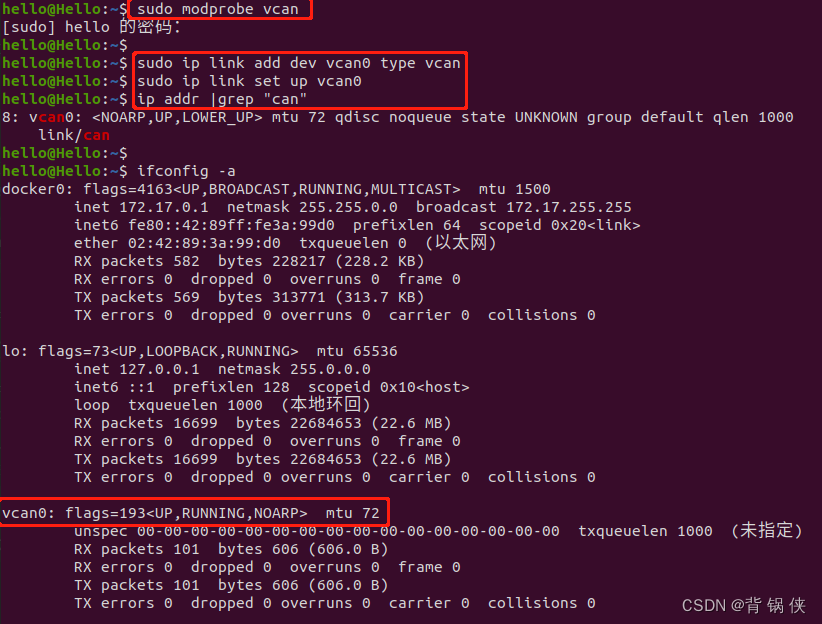
# 加载虚拟 CAN:
sudo modprobe vcan? 1.2 添加本机的 vcan0
# 添加 VCAN0 到操作系统:
sudo ip link add dev can0 type vcan? 1.3 查看添加的 vcan0
# 查看 CAN0 :
ifcon?g -a? 1.4 开启本机的 vcan0
# 开启 CAN0 :
sudo ip lin? 1.5 关闭本机的 vcan0
# 关闭 CAN0 :
sudo ip link set dev can0 down? 1.6 删除本机的 vcan0
# 删除 CAN0 :
sudo ip link del dev can0二、测试本机的 VCAN
? 2.1 CAN 发送数据 代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <sys/socket.h>
#include <sys/ioctl.h>
#include <net/if.h>
int main(int argc, char* argv[]) {
int skt = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (0 > skt) {
perror("create socket error");
return -1;
}
// 指定 can0 设备
struct ifreq ifr = { 0 };
strcpy(ifr.ifr_name, "vcan0");
ioctl(skt, SIOCGIFINDEX, &ifr);
struct sockaddr_can addr = { 0 };
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
// 将 can0 与套接字进行绑定
int rv = bind(skt, (struct sockaddr*)&addr, sizeof(addr));
if (rv < 0) {
perror("bind socket error");
close(skt);
return -2;
}
// 设置过滤规则:不接受任何报文、仅发送数据
setsockopt(skt, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
// 发送数据
struct can_frame frame = { 0 };
frame.can_id = 0x123;
frame.can_dlc = 6; {
frame.data[0] = 0xA0;
frame.data[1] = 0xB0;
frame.data[2] = 0xC0;
frame.data[3] = 0xD0;
frame.data[4] = 0xE0;
frame.data[5] = 0xF0;
}
unsigned short index = 0;
while (true) {
// 开始发送数据
rv = write(skt, &frame, sizeof(frame));
if (sizeof(frame) != rv) {
perror("write can frame failed");
break;
} else {
printf("send count : %d \n", ++index);
sleep(1); // 1 second
}
}
close(skt);
return 0;
}
? 2.2 CAN 接收数据 代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <sys/socket.h>
#include <sys/ioctl.h>
#include <net/if.h>
int main(int argc, char* argv[]) {
int skt = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (0 > skt) {
perror("create socket error");
return -1;
}
// 指定 can0 设备
struct ifreq ifr = { 0 };
strcpy(ifr.ifr_name, "vcan0");
ioctl(skt, SIOCGIFINDEX, &ifr);
struct sockaddr_can addr = { 0 };
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
// 将 can0 与套接字进行绑定
int rv = bind(skt, (struct sockaddr*)&addr, sizeof(addr));
if (0 > rv) {
perror("bind error");
close(skt);
return -2;
}
// 设置过滤规则
// setsockopt(skt, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
// 接收数据
struct can_frame frame = { 0 };
while (true) {
rv = read(skt, &frame, sizeof(struct can_frame));
if (rv < 0) {
perror("read can frame error");
break;
}
// 校验是否接收到错误帧
if (frame.can_id & CAN_ERR_FLAG) {
printf("error can frame \n");
break;
}
// 校验帧格式
if (frame.can_id & CAN_EFF_FLAG) {
printf("扩展帧 <0x%08x> ", frame.can_id & CAN_EFF_MASK);
} else {
printf("标准帧 <0x%03x> ", frame.can_id & CAN_SFF_MASK);
}
// 校验帧类型:数据帧还是远程帧
if (frame.can_id & CAN_RTR_FLAG) {
printf("remote request frame \n");
continue;
}
// 打印数据
printf("[%d] ", frame.can_dlc);
for (int idx = 0; idx < frame.can_dlc; idx++) {
printf("%02x ", frame.data[idx]);
} printf("\n");
}
close(skt);
return 0;
}
? 2.3 CMakeLists.txt 代码
cmake_minimum_required(VERSION 3.0)
# 设置统一输出目录
set(CMAKE_ARCHIVE_OUTPUT_DIRECTORY ${PROJECT_BINARY_DIR}/lib)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_BINARY_DIR}/bin)
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_BINARY_DIR}/bin)
# 设置统一链接目录
link_directories(${CMAKE_ARCHIVE_OUTPUT_DIRECTORY})
link_directories(${CMAKE_LIBRARY_OUTPUT_DIRECTORY})
# 主要工程项目
add_executable(vcan_recv vcan_recv.cpp)
add_executable(vcan_send vcan_send.cpp)
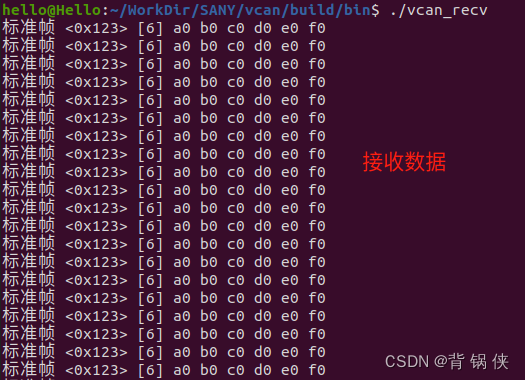
?? 2.4 虚拟 CAN 收发测试
?? 
三、VCAN 的其它操作
?
?安装 can 工具:sudo apt install can-utils
?
? 3.1 启用 VCAN
# 启用 CAN
sudo ip link set vcan0 up? 3.2 关闭 VCAN
# 关闭 CAN
sudo ip link set vcan0 down? 3.3 重启 VCAN
# 重启CAN
sudo canconfig vcan0 restart? 3.4 停止 VCAN
# 停止CAN
sudo canconfig vcan0 stop
? 3.5 设备波特率
# 设置波特率
sudo ip link set vcan0 up type can bitrate 250000? 3.6 显示 VCAN 详细信息
# 显示 CAN 详细信息
sudo ip -details link show vcan0?3.7 VCAN 回环测试
# 回环测试
sudo canconfig vcan0 ctrlmode loopback on?3.8 发送 VCAN 数据
# 向 CAN 总线发送数据
sudo cansend vcan0 --identifier=ID+数据
? 3.9 接收 VCAN 数据
# 接收 CAN 总线数据
sudo candump vcan0? 3.10 查看 VCAN 状态
# 查看CAN总线状态
sudo canecho vcan0? 3.11 VCAN 数据过滤
# 使用滤波器接收 ID 匹配的数据
sudo candump vcan0 --filter=ID:mask
文章来源:https://blog.csdn.net/wxl5018/article/details/135283703
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!