【Mode Management】CanSM详细介绍
1.?Introduction and functional overview
AUTOSAR BSW栈为每个通信总线指定一个总线特定的状态管理器。CANSM实现CAN总线的数据流控制。CanSM隶属于通信服务层。CanSM和通信硬件抽象层以及系统服务层交互。

CanSM只用用于控制CAN通信。CanSM的任务就是操作CanIf模块去控制一个或者多个CAN控制器或者收发器驱动。
2.Dependencies to other modules
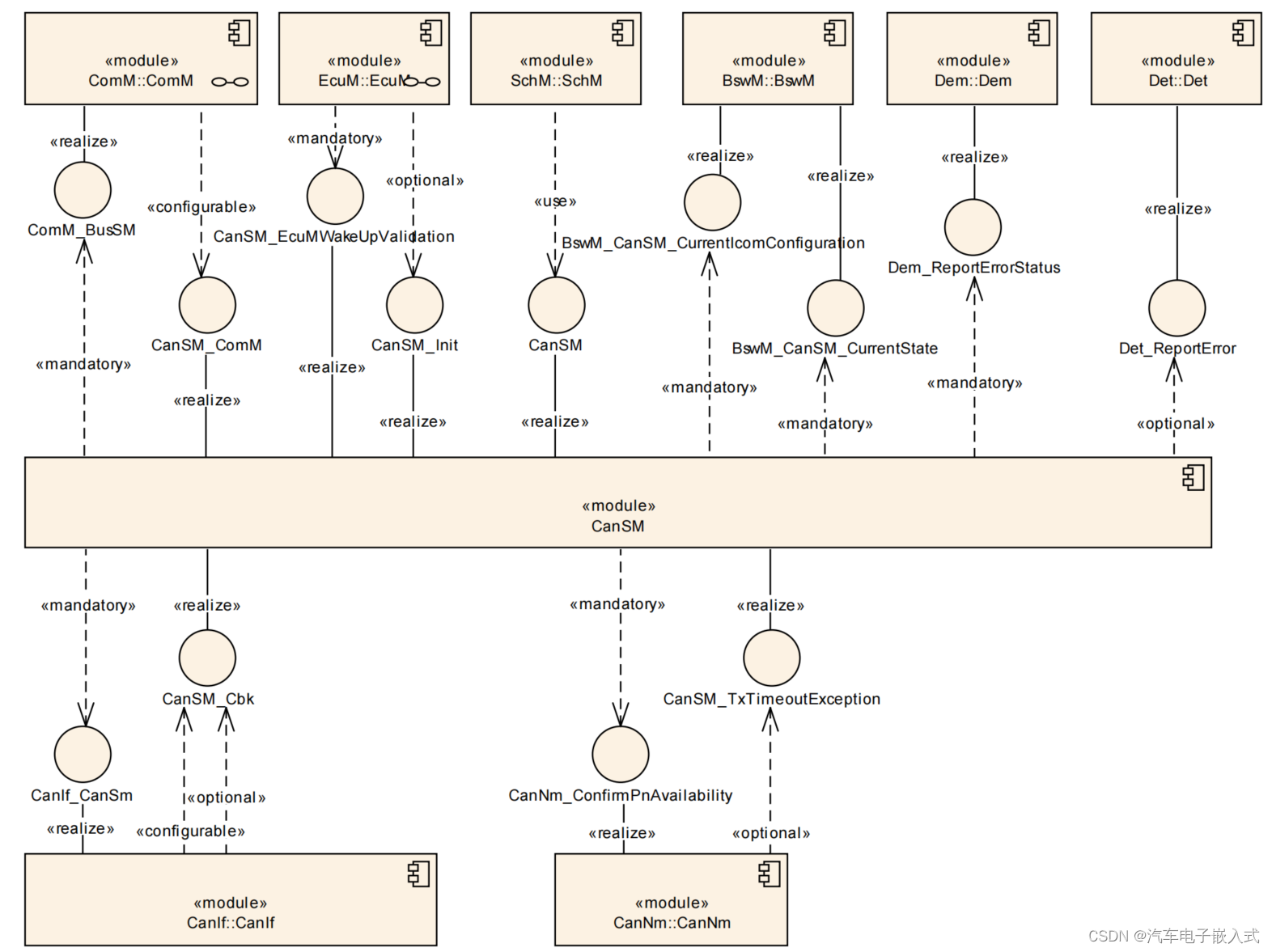
ECU State Manager (EcuM)
EcuM模块初始化CanSM模块,并与CanSM模块进行交互,以进行CAN唤醒验证。
BSW Scheduler (SchM)
SchM模块周期调用CanSM模块的MainFunction函数。
Communication Manager (ComM)?
ComM模块使用CanSM模块的API来请求CAN网络的通信模式,并使用唯一的网络句柄进行标识。CanSM模块通知当前CAN网络的通信模式给ComM模块。
CAN Interface (CanIf)
CanSM模块使用CanIf模块的API来控制分配给CAN网络的CAN控制器和CAN收发器的操作模式。CanIf模块将外设事件通知给CanSM模块。
Diagnostic Event Manager (DEM)
CanSM模块将特定的总线错误上报给DEM模块。
Basic Software Mode Manager (BswM)
CanSM模块将总线模式的改变通知到BswM模块。
CAN Network Management (CanNm)
CanSM模块需要将能用的CAN网络通知给CanNM模块,CanSM模块也需要处理CanNM模块通知的超时异常。
Default Error Tracer (DET)
CanSM模块将运行时的错误上报给DET模块。
3.Functional specification
一个ECU可以有不同的通信网络。每个网络都必须用一个唯一的网络句柄来标识。通信模块向网络请求通信模式。它通过它的配置知道哪个句柄被分配给了什么类型的网络。对于CAN,它使用CanSM模块。CanSM模块负责CAN网络的控制流抽象:它根据来自ComM模块的模式请求改变配置的CAN网络的通信模式。
因此CanSM模块使用CanIf模块的API。CanIf模块负责所配置的CAN控制器和CAN收发器的控制流抽象(CanIf模块的数据流抽象与CanSM模块无关)。CAN控制器模式和CAN收发器的任何改变
模式将由CanIf模块通知到CanSM模块。根据CAN网络状态机的通知和状态,CanSM模块将通知ComM和BswM, CanSM模块将为每个配置的CAN网络实现这些通知和状态
3.1General requirements
CanSM模块应该将每一个配置了的CAN通道的当前模式存储下来。
一个CAN网络没有配置CanSMTransceiverId参数,那么CanSM模块将绕过所有指定的CAN网络的CanIf_SetTrcvMode调用,并继续不同的状态转换,就像它已经获得了假定的 CanSM_TransceiverModeIndication。也就是说,一个CAN网络没有配置CanSMTransceiverId参数,当上层模块调用CanIf_SetTrcvMode函数,CanSM模块认为CAN模式转换成功,切换CanSM内部存储的CAN模式,同时调用CanSM_TransceiverModeIndication模式切换函数通知到上层模块。
上层模块对每一个CAN网络的最近一次调用CanSM_RequestComMode函数且返回成功E_OK的请求应该被CanSM模块存储下来,这些请求时CAN网络状态机切换的条件。
3.2State machine for each CAN network
CanSM模块为每一路CAN网络维持一个内部的状态机,包括:CANSM_BSM_S_FULLCOM,CANSM_BSM_S_PRE_FULLCOM,CANSM_BSM_S_CHANGE_BAUDRATE,CANSM_BSM_WUVALIDATION,CANSM_BSM_S_SILENTCOM_BOR,CANSM_BSM_S_SILENTCOM,CANSM_BSM_S_PRE_NOCOM,CANSM_BSM_S_NOCOM,CANSM_BSM_S_NOT_INITIALIZED?9种状态。
以下对于CanSM内部状态机切换的描述都是站在一路CAN状态机的角度来描述的。

3.2.1Trigger: PowerOn
ECU上电后,每一路CanSM状态机默认进入CANSM_BSM_S_NOT_INITIALIZED状态。
3.2.2Trigger: CanSM_Init
EcuM模块调用CanSM_Init函数,CanSM状态从CANSM_BSM_S_NOT_INITIALIZED切换到CANSM_BSM_S_PRE_NOCOM状态。
3.2.3 Trigger: CanSM_DeInit
只有在CANSM_NO_COMMUNICATION状态下调用CanSM_DeInit函数才会发生状态改变,CanSM状态从CANSM_NO_COMMUNICATION状态且切换到CANSM_BSM_S_NOT_INITIALIZED状态。
CanSM_DeInit函数被调用且成功后会触发CanSM模块管理的所有CAN网络发生状态改变。
3.2.4 Trigger: T_START_WAKEUP_SOURCE
CanSM状态机处于CANSM_BSM_S_PRE_NOCOM或者CANSM_BSM_S_NOCOM状态下, 上层模块调用CanSM_StartWakeUpSource开始唤醒源检测(一般是在EcuM模块调用),并且函数返回E_OK,则CanSM状态机切换到CANSM_BSM_WUVALIDATION状态。
3.2.5 Trigger: T_STOP_WAKEUP_SOURCE
CanSM状态机处于CANSM_BSM_WUVALIDATION状态时,上层模块调用 CanSM_StopWakeUpSource函数停止唤醒源检测,并且函数返回E_OK,则CanSM状态机切换到CANSM_BSM_S_PRE_NOCOM状态。
3.2.6 Trigger: T_FULL_COM_MODE_REQUEST
CanSM状态机处于CANSM_BSM_WUVALIDATION或者CANSM_BSM_S_NOCOM状态时,上层模块调用CanSM_RequestComMode且函数参数ComM_Mode等于COMM_FULL_COMMUNICATION时(ComM模块调用),则函数参数 network标识的网络CanSM状态机切换到CANSM_BSM_S_PRE_FULLCOM状态。
3.2.7 Trigger: T_NO_COM_MODE_REQUEST
CanSM状态机处于CANSM_BSM_S_FULLCOM或者CANSM_BSM_S_PRE_FULLCOM或者CANSM_BSM_S_SILENTCOM状态时,上层模块调用CanSM_RequestComMode且函数参数ComM_Mode等于COMM_NO_COMMUNICATION时,则函数参数 network标识的网络CanSM状态机切换到CANSM_BSM_S_PRE_NOCOM状态。
3.2.8 Trigger: T_BUS_OFF
CanSM状态机处于CANSM_BSM_S_SILENTCOM状态时,CAN网络发生BusOff实践,CanSM模块的回调函数 CanSM_ControllerBusOff被调用,CanSM状态机切换到CANSM_BSM_S_SILENTCOM_BOR状态。
3.2.9 Trigger: T_REPEAT_MAX
CanSM状态机处于CANSM_BSM_S_SILENTCOM_BOR状态时,CanSM模块调用CanIf模块的接口尝试从新开启CAN控制器,如果没有返回E_OK且没有收到预定的开始CAN控制器的成功通知的次数(失败的次数)大于配置参数T_REPEAT_MAX后,状态机机切换到CANSM_BSM_S_PRE_NOCOM状态。
3.2.10 Guarding condition: G_FULL_COM_MODE_REQUESTED
CanSM状态机处于CANSM_BSM_S_CHANGE_BAUDRATE状态时,上层模块(ComM)调用CanSM_RequestComMode函数请求Can通信模式的最后的请求是全通信模式(ComM_Mode等于COMM_FULL_COMMUNICATION),状态机切换到CANSM_BSM_S_FULLCOM状态。
3.2.11 Guarding condition: G_SILENT_COM_MODE_REQUESTED
CanSM状态机处于CANSM_BSM_S_CHANGE_BAUDRATE状态时,上层模块(ComM)调用CanSM_RequestComMode函数请求Can通信模式的最后的请求是静默模式(ComM_Mode等于COMM_SILENT_COMMUNICATION),状态机切换到CANSM_BSM_S_SILENTCOM状态。
3.2.12 Effect: E_PRE_NOCOM
CanSM状态机处于CANSM_BSM_S_FULLCOM或者CANSM_BSM_S_SILENTCOM或者CANSM_BSM_S_SILENTCOM_BOR状态,CanSM状态机由于满足T_NO_COM_MODE_REQUEST,T_REPEAT_MAX或者T_NO_COM_MODE_REQUEST条件切换到CANSM_BSM_S_PRE_NOCOM状态,则BswM_CanSM_CurrentState函数将被调用( Network := CanSMComMNetworkHandleRef and CurrentState := CANSM_BSWM_NO_COMMUNICATION)。
3.2.13 Effect: E_NOCOM
CanSM状态机处于CANSM_BSM_S_PRE_NOCOM状态切换到CANSM_BSM_S_NOCOM状态时,如果已经存在网络的通信模式请求,且存储的通信模式请求为COMM_NO_COMMUNICATION,那么CanSM_BSM状态机的效果E_NOCOM将使用参数Channel:= CanSMComMNetworkHandleRef和ComMode:= COMM_NO_COMMUNICATION调用API ComM_BusSM_ModeIndication。
3.2.14 Effect: E_FULL_COM
CanSM状态机从CANSM_BSM_S_PRE_FULLCOM状态切换到CANSM_BSM_S_FULLCOM状态时,将会产生以下的动作(Effect)。
(1)如果 ECU被动模式(ECU passive mode)等于true,则 CanIf_SetPduMode被调用( ControllerId := CanSMControllerId, PduModeRequest :=CANIF_ONLINE.)。
(2)如果 ECU被动模式(ECU passive mode)等于false,则 CanIf_SetPduMode被调用( ControllerId := CanSMControllerId, PduModeRequest :=CANIF_TX_OFFLINE_ACTIVE.)。
(3)CanSM模块将会调用 ComM_BusSM_ModeIndication函数(Channel :=
CanSMComMNetworkHandleRef, ComMode := COMM_FULL_COMMUNICATION)。
(4)CanSM模块将会调用 BswM_CanSM_CurrentState函数( Network :=
CanSMComMNetworkHandleRef,CurrentState :=CANSM_BSWM_FULL_COMMUNICATION)。
3.2.15 Effect: E_FULL_TO_SILENT_COM
CanSM状态机从CANSM_BSM_S_FULLCOM状态切换到CANSM_BSM_S_SILENTCOM状态时,将会产生以下的动作(Effect)。
(1)CanSM模块将会调用 BswM_CanSM_CurrentState函数( Network :=
CanSMComMNetworkHandleRef,CurrentState :=CANSM_BSWM_SILENT_COMMUNICATION)
(2)CanIf_SetPduMode被调用( ControllerId := CanSMControllerId, PduModeRequest :=CANIF_TX_OFFLINE.)。
(3)CanSM模块将会调用 ComM_BusSM_ModeIndication函数(Channel :=
CanSMComMNetworkHandleRef, ComMode := COMM_SILENT_COMMUNICATION)。
3.2.16 Effect: E_BR_END_FULL_COM
CanSM状态机从CANSM_BSM_S_CHANGE_BAUDRATE状态切换到CANSM_BSM_S_FULLCOM状态。产生的动作(Effect)和3.2.14一样。
3.2.17 Effect: E_BR_END_SILENT_COM
CanSM状态机从CANSM_BSM_S_CHANGE_BAUDRATE状态切换到CANSM_BSM_S_SILENTCOM状态。产生的动作(Effect)和3.2.15一样。
3.2.18 Effect: E_SILENT_TO_FULL_COM
CanSM状态机从CANSM_BSM_S_SILENTCOM状态切换到CANSM_BSM_S_FULLCOM状态。产生的动作(Effect)和3.2.14一样。
3.2.19 Sub state machine CANSM_BSM_WUVALIDATION
CANSM_BSM_WUVALIDATION状态包含:S_TRCV_NORMAL,S_TRCV_NORMAL_WAIT,S_CC_STOPPED,S_CC_STOPPED_WAIT,S_CC_STARTED,S_CC_STARTED_WAIT,WAIT_WUVALIDATION_LEAVE六个子状态。
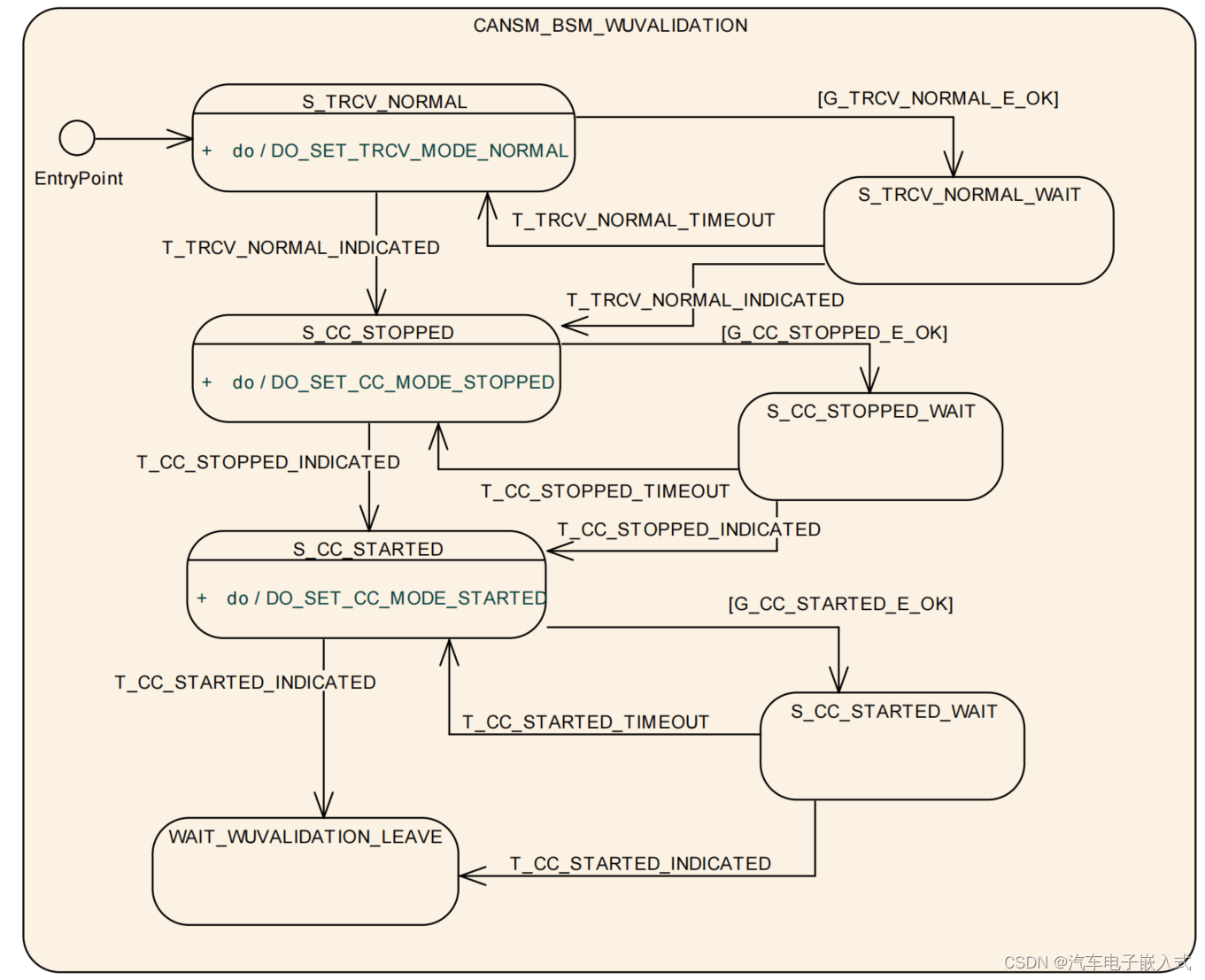
默认进入S_TRCV_NORMAL状态,CanSM模块会调用 CanIf_SetTrcvMode( TransceiverMode == ?CANTRCV_TRCVMODE_NORMAL)函数设置CanTrcv收发器到 CANTRCV_TRCVMODE_NORMAL状态,如果接收到CanIf的Indication(CanTrcv转换到CANTRCV_TRCVMODE_NORMAL模式),则进入到S_CC_STOPPED状态。如果没有接收到CanIf的Indication,则进入到S_TRCV_NORMAL_WAIT状态(S_TRCV_NORMAL_WAIT状态下也可以接收到CanIf的Indication切换到S_CC_STOPPED状态)。
同样的逻辑:
S_CC_STOPPED 切换到 S_CC_STARTED状态的条件:CanSM模块调用CanIf_SetTrcvMode( TransceiverMode == ?CAN_CS_STOPPED)且接收到CanTcv切换到CAN_CS_STOPPED模式的Indication。同样存在TimeOut的情况。
S_CC_STARTED切换到WAIT_WUVALIDATION_LEAVE状态的条件:调用CanIf_SetTrcvMode( TransceiverMode == ?CAN_CS_STARTED)且接收到CanTcv切换到CAN_CS_STARTED模式的Indication。同样存在TimeOut的情况。
最后,如果整个子状态机从WAIT_WUVALIDATION_LEAVE退出,则进入到CANSM_BSM_S_PRE_FULLCOM状态,否则(超过重复请求最大次数,T_REPEAT_MAX)进入到CANSM_BSM_S_PRE_NOCOM状态。
3.2.20 Sub state machine: CANSM_BSM_S_PRE_NOCOM
CANSM_BSM_S_PRE_NOCOM状态包含:CANSM_BSM_DeinitPnNotSupported,CANSM_BSM_DeinitPnSupported
CANSM_BSM_DeinitPnSupported两个子状态。

进入CANSM_BSM_S_PRE_NOCOM状态后,根据配置参数CanTrcvPnEnabled进入不同的子状态:
CanTrcvPnEnabled == FALSE,进入CANSM_BSM_DeinitPnNotSupported子状态。
CanTrcvPnEnabled == TRUE,进入CANSM_BSM_DeinitPnSupported子状态。
CANSM_BSM_DeinitPnSupported子状态下又包含极为复杂的子状态,一般我们CanTrcvPnEnabled 配置为FALSE,这里不再深入讲解。

CANSM_BSM_DeinitPnNotSupported子状态下又包含:S_CC_STOPPED,S_CC_STOPPED_WAIT,S_CC_SLEEP,S_CC_SLEEP_WAIT,S_TRCV_NORMAL,S_TRCV_NORMAL_WAIT,S_TRCV_STANDBY,S_TRCV_STANDBY_WAIT八个子状态。
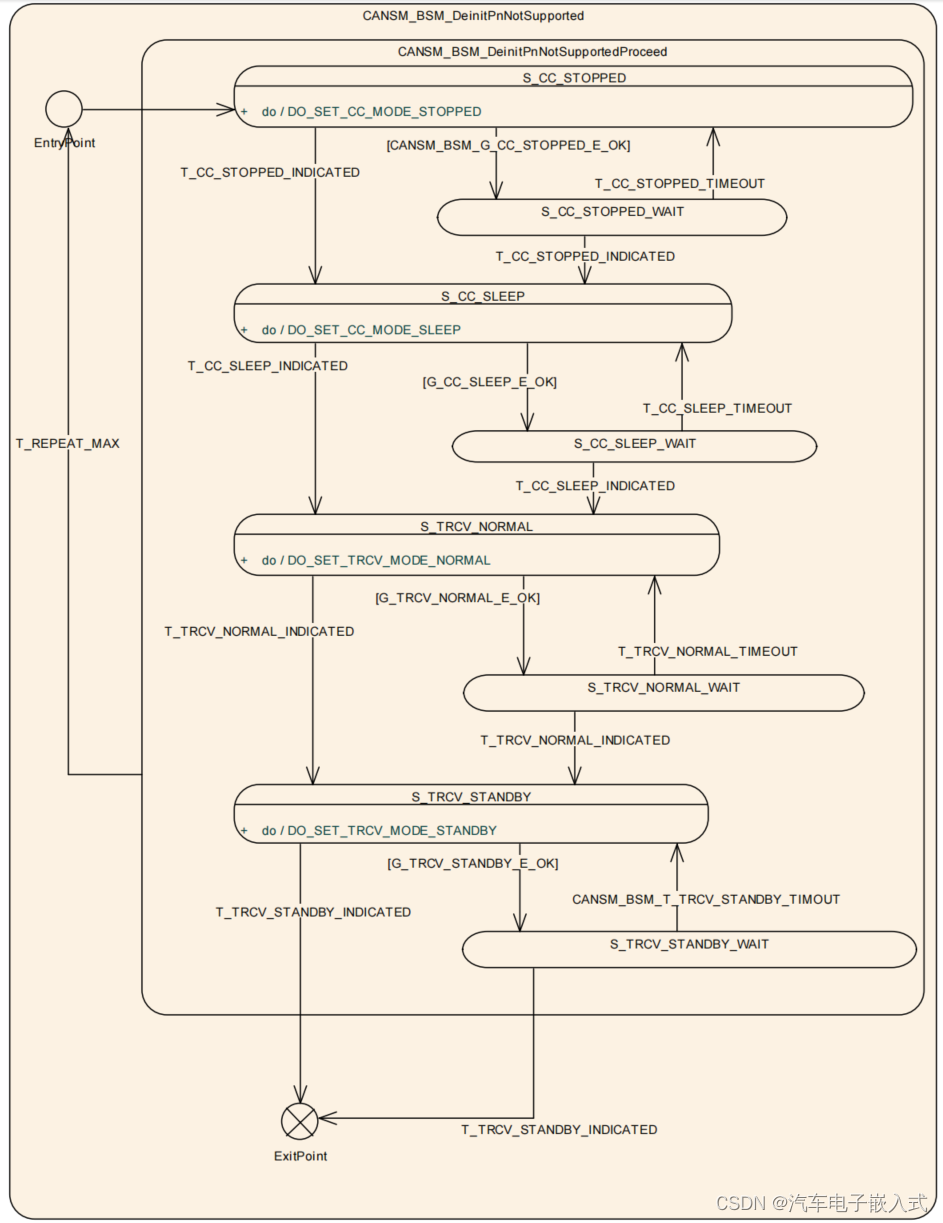
默认进入S_CC_STOPPED子状态,随后的逻辑和3.2.19中子状态迁移逻辑类似。
S_CC_STOPPED状态切换到S_CC_SLEEP状态:CanSM调用CanIf_SetControllerMode(ControllerMode == ?CAN_CS_STOPPED)且接收到Can控制器模块(Can Controller)的模式切换成功的Indication。
S_CC_SLEEP状态切换到S_TRCV_NORMAL状态:CanSM调用CanIf_SetControllerMode(ControllerMode == ??CAN_CS_SLEEP,)且接收到Can控制器模块(Can Controller)的模式切换成功的Indication。
S_TRCV_NORMAL状态切换到S_TRCV_STANDBY状态:CanSM调用CanIf_SetTrcvMode(TransceiverMode == CANTRCV_TRCVMODE_NORMAL)且接收到Can收发器(CanTrcv)模块的模式切换成功的Indication。
S_TRCV_STANDBY状态退出整个CANSM_BSM_DeinitPnNotSupported状态:CanSM调用CanIf_SetTrcvMode(TransceiverMode == CANTRCV_TRCVMODE_STANDBY)且接收到Can收发器(CanTrcv)模块的模式切换成功的Indication。
整个子状态切换过程中,任何一个状态切换如果没有收到对应的Indication,则会进入到超时TimeOut状态,然后重试Repeat,一旦重试次数大于T_REPEAT_MAX,则状态机退出整个CANSM_BSM_DeinitPnNotSupported状态。
3.2.21 Sub state machine: CANSM_BSM_S_SILENTCOM_BOR
CANSM_BSM_S_SILENTCOM_BOR状态下包括:S_RESTART_CC,CANSM_BSM_S_RESTART_CC_WAIT两个子状态。
默认进入S_RESTART_CC子状态,在S_RESTART_CC子状态下CanSM模块调用CanIf_SetControllerMode( ControllerMode == ?CAN_CS_STARTED)函数,如果接收到Can控制器模式切换成功的Indication,则退出CANSM_BSM_S_SILENTCOM_BOR状态,否则CanIf_SetControllerMode函数调用后进入CANSM_BSM_S_RESTART_CC_WAIT子状态。
3.2.22 Sub state machine: CANSM_BSM_S_PRE_FULLCOM
CANSM_BSM_S_PRE_FULLCOM状态下包括:S_TRCV_NORMAL,S_TRCV_NORMAL_WAIT,S_CC_STOPPED,S_CC_STOPPED_WAIT,S_CC_STARTED,S_CC_STARTED_WAIT六个子状态。
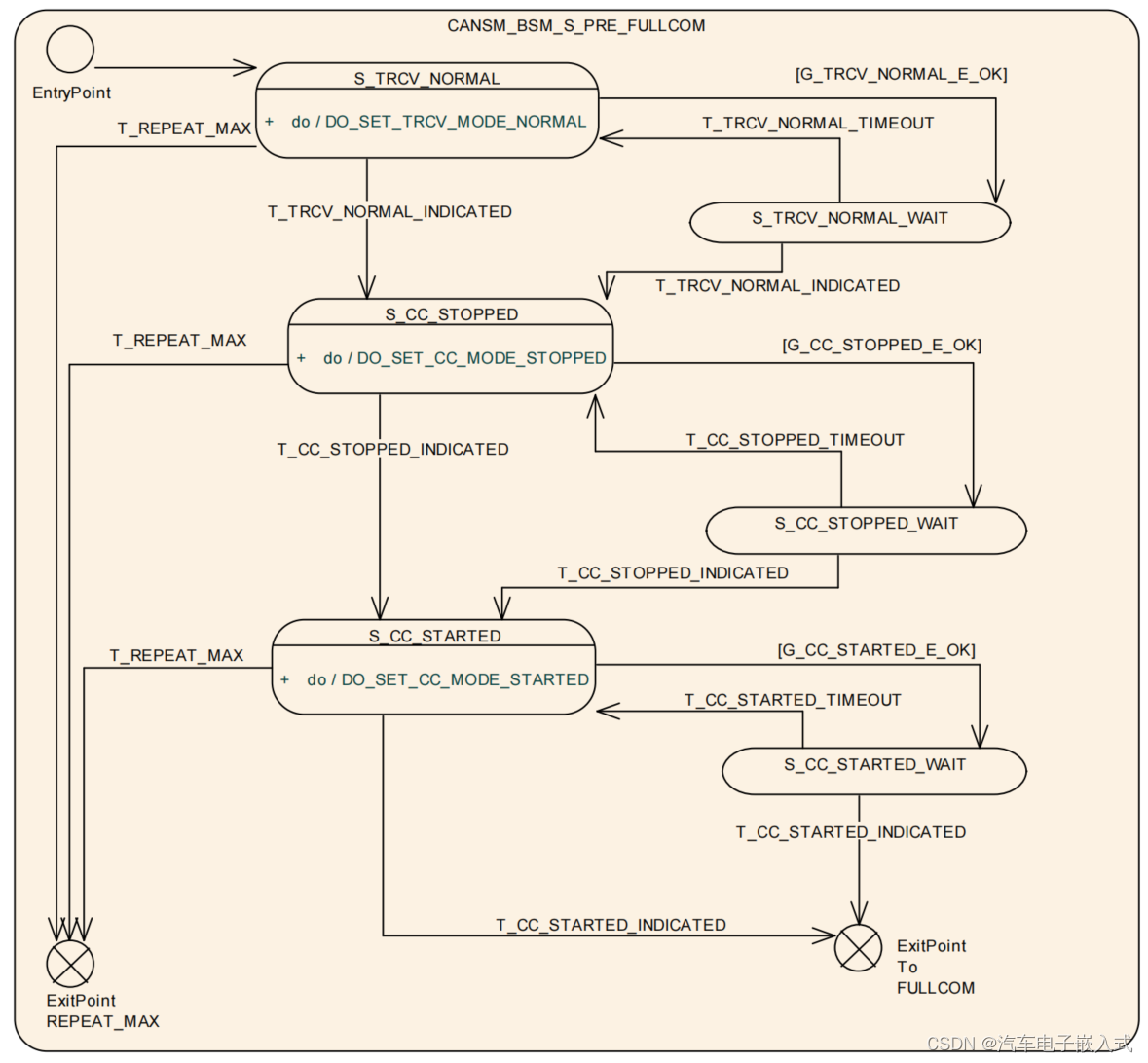
默认进入S_TRCV_NORMAL状态。
S_TRCV_NORMAL状态切换到S_CC_STOPPED状态:CanSM调用CanIf_SetTrcvMode(TransceiverMode == CANTRCV_TRCVMODE_NORMAL)函数,且接收到Can收发器(CanTrcv)模块的模式切换成功的Indication,否则进入到S_TRCV_NORMAL_WAIT状态。
S_CC_STOPPED状态切换到S_CC_STARTED状态:CanSM调用CanIf_SetControllerMode(ControllerMode== ?CAN_CS_STOPPED)函数,且接收到Can控制器(Can Controller)模块的模式切换成功的Indication,否则进入到S_CC_STOPPED_WAIT状态。
S_CC_STARTED状态切换到退出整个CANSM_BSM_S_PRE_FULLCOM状态:CanSM调用CanIf_SetControllerMode(ControllerMode== ??CAN_CS_STARTED,)函数,且接收到Can控制器(Can Controller)模块的模式切换成功的Indication,否则进入到S_CC_STARTED_WAIT状态。
整个子状态切换过程中,任何一个状态切换如果没有收到对应的Indication,则会进入到超时TimeOut状态,然后重试Repeat,一旦重试次数大于T_REPEAT_MAX,则状态机退出整个CANSM_BSM_S_PRE_FULLCOM状态。
3.2.23 Sub state machine CANSM_BSM_S_FULLCOM
CANSM_BSM_S_FULLCOM状态下包括:S_BUS_OFF_CHECK,S_RESTART_CC,S_NO_BUS_OFF,CANSM_BSM_S_TX_TIMEOUT_EXCEPTION,CANSM_BSM_S_RESTART_CC_WAIT,S_TX_OFF六个子状态。

S_BUS_OFF_CHECK状态切换到S_NO_BUS_OFF状态:CANSM_BOR_TX_CONFIRMATION_POLLING功能被Enabled且 CanSM函数调用CanIf_GetTxConfirmationState函数返回 CANIF_TX_RX_NOTIFICATION。
S_NO_BUS_OFF状态退出CANSM_BSM_S_FULLCOM状态切换到CANSM_BSM_S_CHANGE_BAUDRATE状态:CanSM调用CanSM_SetBaudrate且没有被拒绝。如果切换成功,CanSM调用 BswM_CanSM_CurrentState(Network := CanSMComMNetworkHandleRef,CurrentState
:= CANSM_BSWM_CHANGE_BAUDRATE).
S_BUS_OFF_CHECK状态切换到S_RESTART_CC状态:CanSM模块的回调函数CanSM_ControllerBusOff被调用。如果状态切换成功,CanSM调用 BswM_CanSM_CurrentState( Network := CanSMComMNetworkHandleRef and CurrentState
:= CANSM_BSWM_BUS_OFF),CanSM调用ComM_BusSM_ModeIndication( Channel := CanSMComMNetworkHandleRef,ComMode := COMM_SILENT_COMMUNICATION)。
S_RESTART_CC状态切换到S_TX_OFF状态:CanSM模块调用CanIf_SetControllerMode(ControllerMode?== CAN_CS_STARTED)且接收到CAN控制器模式切换成功的Indication,否则进入CANSM_BSM_S_RESTART_CC_WAIT状态。
S_TX_OFF状态切换到S_BUS_OFF_CHECK状态:
条件:1 || 2 || 3
(1)CanSMEnableBusOffDelay == FALSE,且Bus-Off恢复从第1级(短恢复时间)切换到第2级(长恢复时间)之前的Bus-Off计数小于 CanSMBorCounterL1ToL2,且总线恢复计时满足快恢复时间 CanSMBorTimeL1。
(2)CanSMEnableBusOffDelay == FALSE,且Bus-Off恢复从第1级(短恢复时间)切换到第2级(长恢复时间)之前的Bus-Off计数大于 CanSMBorCounterL1ToL2,且总线恢复计时满足慢恢复时间 CanSMBorTimeL2。
(3)CanSMEnableBusOffDelay == TRUE,总线恢复后随意指定的时间后即可。
执行的动作:
(1)CanSM调用 CanIf_SetPduMode(ControllerId := CanSMControllerId, PduModeRequest :=
CANIF_ONLINE)
(2)CanSM调用CanIf_SetPduMode(ControllerId := CanSMControllerId,PduModeRequest :=
CANIF_TX_OFFLINE_ACTIVE)
(3)CanSM调用 BswM_CanSM_CurrentState( Network := CanSMComMNetworkHandleRef ,CurrentState := CANSM_BSWM_FULL_COMMUNICATION)
(4)CanSM调用ComM_BusSM_ModeIndication(CanSMComMNetworkHandleRef ,ComMode :=
COMM_FULL_COMMUNICATION)
S_NO_BUS_OFF状态切换到CANSM_BSM_S_RESTART_CC_WAIT状态:回调函数 CanSM_TxTimeoutException被调用。
CANSM_BSM_S_RESTART_CC_WAIT状态下包括:S_CC_STOPPED,S_CC_STOPPED_WAIT,S_CC_STARTED,S_CC_STARTED_WAIT四个子状态。
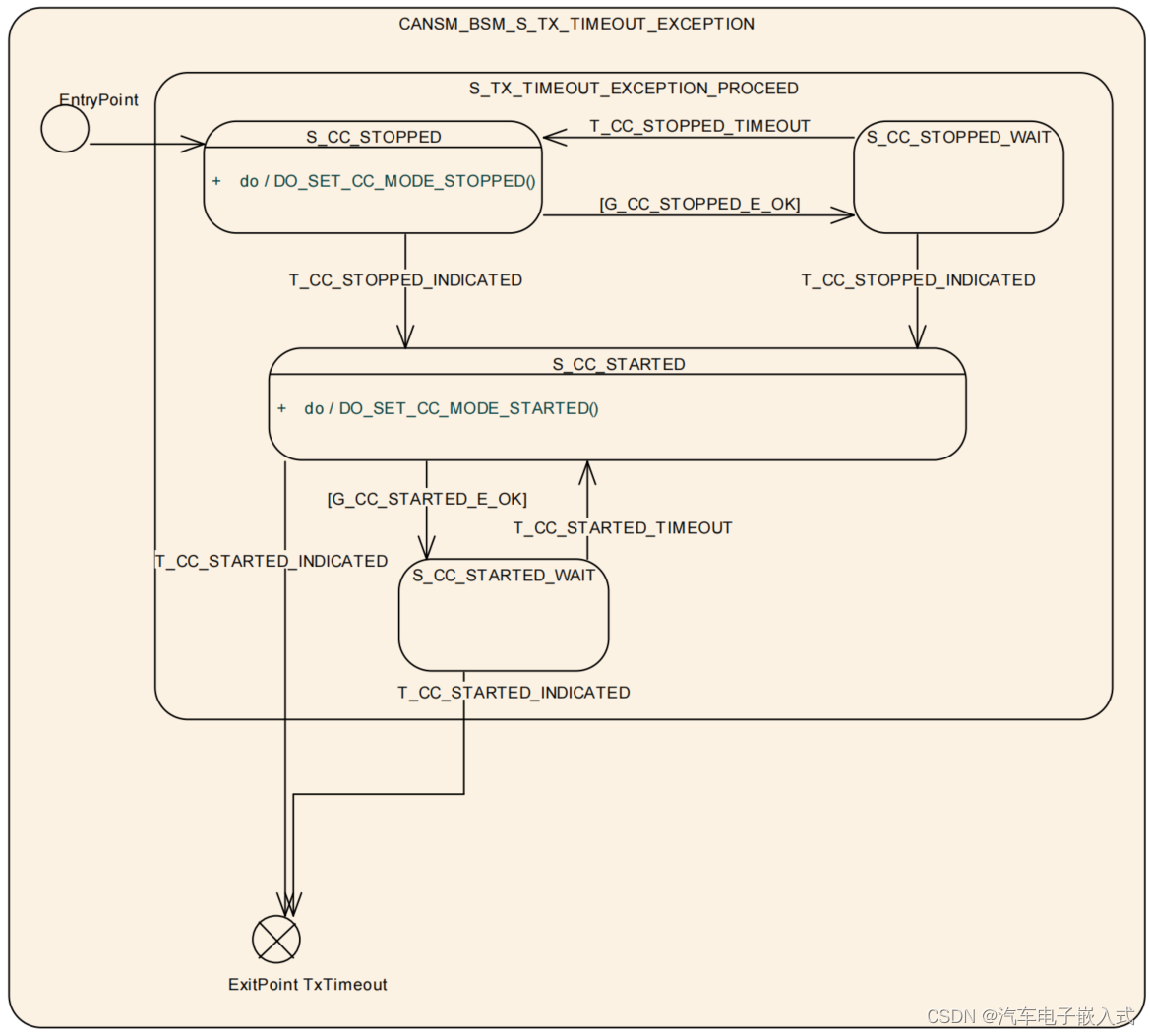
默认进入S_CC_STOPPED子状态,和之前分析一样,调用CanIf_SetControllerMode先进入 CAN_CS_STOPPED状态后尝试恢复CAN控制器(S_CC_STARTED)。不过值得注意的事,没有超时退出CANSM_BSM_S_TX_TIMEOUT_EXCEPTION状态的机制。
3.2.24 Sub state machine: CANSM_BSM_S_CHANGE_BAUDRATE
CANSM_BSM_S_CHANGE_BAUDRATE状态下包括CANSM_BSM_CHANGE_BR_SYNC,S_CC_STOPPED,S_CC_STOPPED_WAIT,S_CC_STARTED,S_CC_STARTED_WAIT五个子状态。
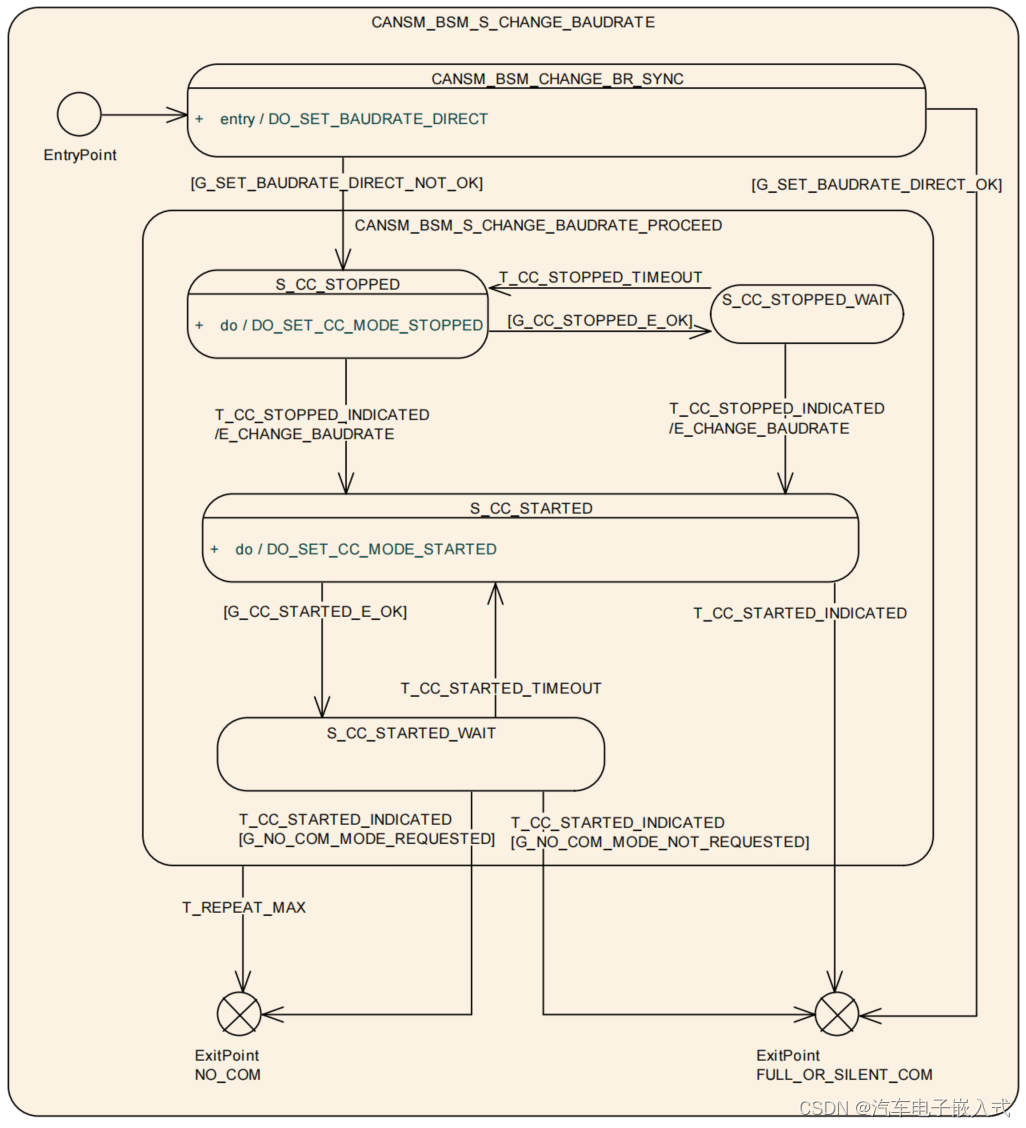
实际项目中一般不会在运行时动态改变波特率,这里不再详细讲解。
4.关键API
4.1Function definitions
CanSM_RequestComMode
Std_ReturnType CanSM_RequestComMode(NetworkHandleType network,ComM_ModeType?ComM_Mode)
改变network参数标识的网络的通信模式为Mode。
CanSM_GetCurrentComMode
Std_ReturnType CanSM_GetCurrentComMode(NetworkHandleType network,ComM_ModeType* ComM_ModePtr)
通过指针参数ModePtr获取network标识的网络的通信模式。
CanSM_StartWakeupSource
Std_ReturnType CanSM_StartWakeupSource(NetworkHandleType network)
EcuM模块调用该函数开始CAN唤醒源检测。
CanSM_StopWakeupSource
Std_ReturnType CanSM_StopWakeupSource(NetworkHandleType network)
EcuM模块调用该函数停止CAN唤醒源检测。
4.2Call-back notifications
CanSM_ControllerBusOff
void CanSM_ControllerBusOff(uint8 ControllerId)
通知到CanSM模块ControllerId标识的网络发生Bus-Off事件。
CanSM_ControllerModeIndication
void CanSM_ControllerModeIndication(uint8 ControllerId,Can_ControllerStateType ControllerMode)
通知到CanSM模块,ControllerId标识的网络发生了模式切换到了ControllerMode事件。
CanSM_TransceiverModeIndication
void CanSM_TransceiverModeIndication(uint8 TransceiverId,CanTrcv_TrcvModeType TransceiverMode)
通知到CanSM模块,TransceiverId标识的收发器发生了模式切换到了TransceiverMode事件。
4.3 Scheduled functions
CanSM_MainFunction
void CanSM_MainFunction(void)
5.CanSM和其他模块交互时序分析
CanSM模块的所有交互接口都依赖于CanIf,ComM,BswM,Dem,CanNM等模块。这里以CanSM模块调用CanIf模块接口控制Can控制器为例,说明CanSM模块和其他模块的交互过程。
5.1CanSm_StartCanController时序图
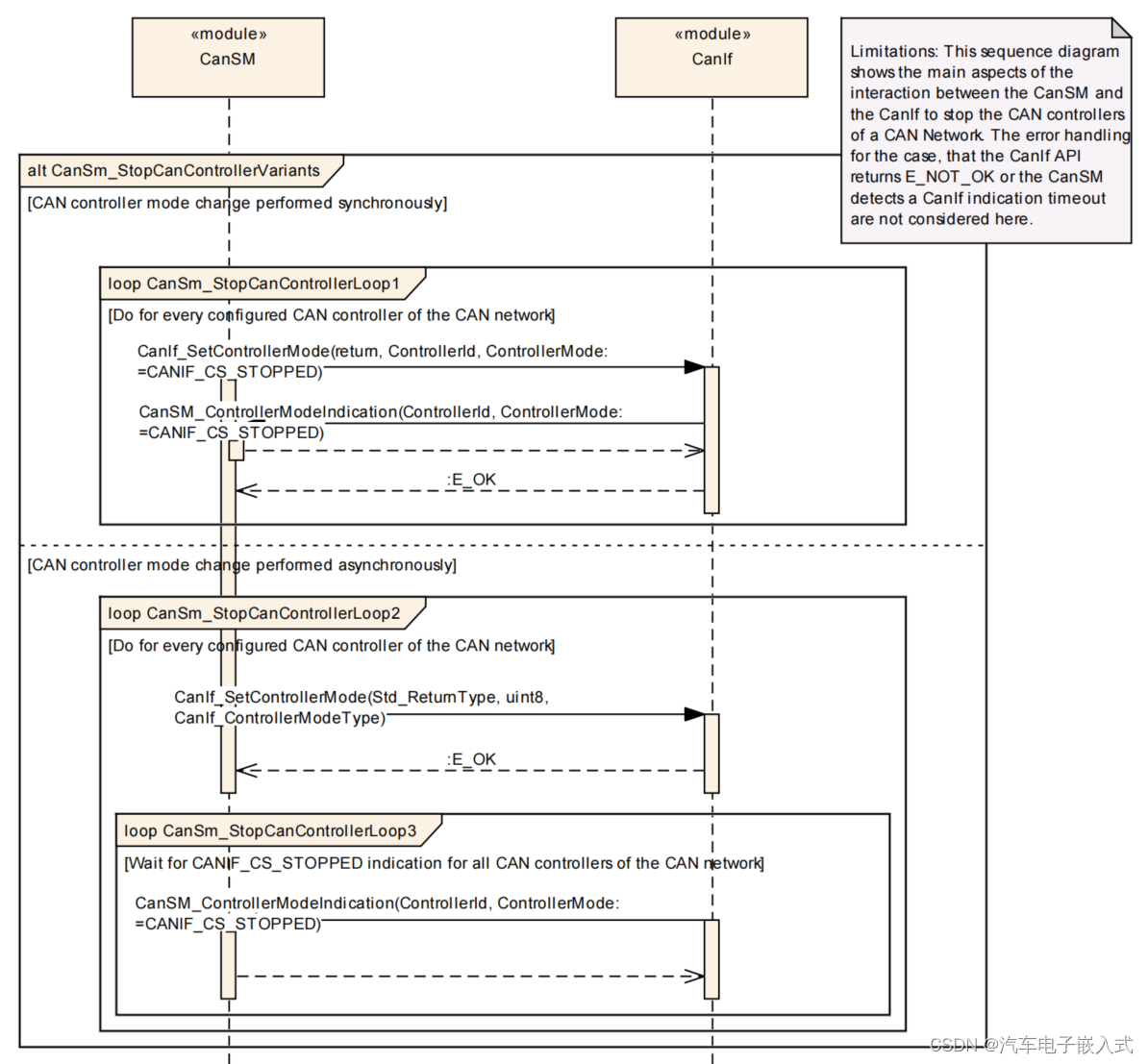
CanSM模块可同步或者异步的设置Can控制器模式。
同步:CanSM模块调用CanIf模块的接口函数CanIf_SetControllerMode设置Can控制器模式,直到接收到CanIf模块的的回调通知CanSM_ControllerModeIndication后CanIf_SetControllerMode函数才返回E_OK,此时Can控制器已经切换到预定的模式。
异步:CanSM模块调用CanIf模块的接口函数CanIf_SetControllerMode后立即返回,之后在CanSM模块的MainFunction中轮询CanIf模块的Indication通知。

5.2CanSm_StopCanController时序图
和CanSm_StartCanController基本类似。
6.CanSM模块配置
CanSM配置主要包括CanSMConfiguration和CanSMGeneral的配置。
CanSMConfiguration: CAN网络的特殊配置,主要包括一些全局配置参数及一些子配置容器的配置。
CanSMGeneral: 通用配置项,主要配置一些预编译功能的开闭。
6.1CanSMGeneral
CanSMDevErrorDetect: 配置是否开启Error检测上报功能。
CanSMGetBusOffDelayFunction: 该参数设置<User_GetBusOffDelay> callout函数的名称,CanSM使用该函数获取额外的L1/L2延迟时间。此功能仅在启用了CanSMEnableBusOffDelay的通道中调用。
CanSMGetBusOffDelayHeader: 该参数配置包含<User_GetBusOffDelay> callout函数原型的头文件。
CanSMIcomSupport: 配置CanSM中对虚拟网络特性的支持。
CanSMMainFunctionTimePeriod: 配置主函数的调度周期。
CanSMPncSupport: 配置是否支持局部网络功能。
CanSMSetBaudrateApi: 配置是否支持Can_SetBaudrate API的使用。
CanSMTxOfflineActiveSupport: 配置是否支持ECU被动功能。
CanSMVersionInfoApi: 配置是否支持版本检测API。
6.2CanSMConfiguration
CanSMModeRequestRepetitionMax: CanSM在进行模式切换请求过程中未收到对应模块模式切换成功的Indication后最大的重试次数。
CanSMModeRequestRepetitionTime: CanSM模块使用CanIf模块的接口重复进行模式切换请求的重复间隔时间。
CanSMManagerNetwork: 这个容器包含每个CAN网络的特定参数。
CanSMBorCounterL1ToL2: 此阈值定义Bus-Off恢复从第1级(短恢复时间)切换到第2级(长恢复时间)之前的Bus-Off计数。
CanSMBorTimeL1: 这个时间参数以秒为单位定义一级(短恢复时间)中Bus-Off恢复时间的持续时间。
CanSMBorTimeL2: 这个时间参数以秒为单位定义第2级(长恢复时间)中Bus-Off恢复时间的持续时间。
CanSMBorTimeTxEnsured: 此参数以秒为单位定义Bus-Off事件检查的持续时间。
CanSMBorTxConfirmationPolling: 如果CanSM轮询CanIf_GetTxConfirmationState API来决定要恢复的总线关闭状态,而不是使用CanSMBorTimeTxEnsured参数来决定,则应该配置此参数。
CanSMEnableBusOffDelay: 这个参数定义了是否应该为这个网络调用<User_GetBusOffDelay>。
CanSMComMNetworkHandleRef: ComM模块中标识一个Can网络的唯一句柄(handle, ComMChannel)。
CanSMTransceiverId: 标识CAN收发器的句柄。
6.2.1 CanSMController
CanSMControllerId: 标识CAN控制器的句柄。
6.2.2 CanSMDemEventParameterRefs
容器中引用DemEventParameter元素,当发生相应的错误时,应该使用API Dem_SetEventStatus调用这些元素。
CANSM_E_MODE_REQUEST_TIMEOUT: 参考配置的DEM事件来报告这个CAN网络的总线关闭错误。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!