MIT_线性代数笔记:第 16 讲 投影矩阵和最小二乘法
投影 Projections
上一讲介绍了投影矩阵 P=A(
A
T
A^T
ATA)
?
1
^{-1}
?1
A
T
A^T
AT,当它作用于向量 b,相当于把 b 投影到矩阵 A 的列空间。
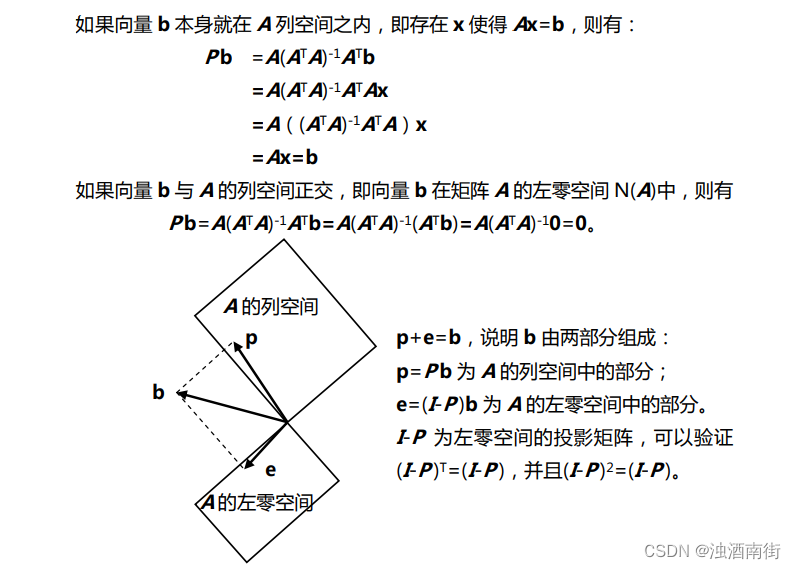
p+e=b,说明 b由两部分组成:
p =Pb为A 的列空间中的部分;
e = (I?P)b为A 的左零空间中的部分。
I ? P 为左零空间的投影矩阵,可以验证
(
I
?
P
)
T
( I ? P )^T
(I?P)T = ( I ? P ),并且
(
I
?
P
)
2
( I ? P ) ^2
(I?P)2 =( I ? P )。
最小二乘法 Least Squares
应用投影矩阵求方程组最优解的方法,最常用于“最小二乘法”拟合曲线。
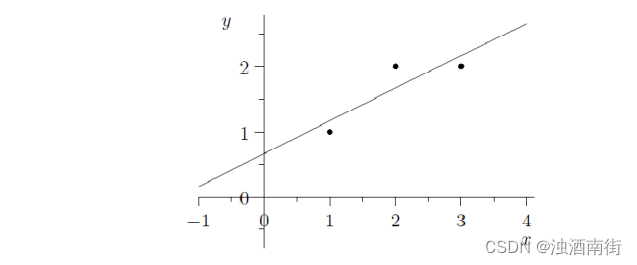
三个点{(1,1), (2,2), (3,2)},求直线方程 b=C+Dt,要求直线尽量接近于三个点。
C
+
D
=
1
C
+
2
D
=
2
C
+
3
D
=
2
矩阵形式为
[
1
1
1
2
1
3
]
[
C
D
]
=
[
1
2
3
]
\begin{align*} C + D =1 \\ C + 2D =2 \\ C + 3D =2 \end{align*} \qquad \qquad \qquad 矩阵形式为 \begin{bmatrix} 1 & 1 \\ 1 & 2 \\ 1 & 3 \end{bmatrix} \begin{bmatrix} C \\ D \end{bmatrix} =\begin{bmatrix} 1 \\ 2 \\ 3 \end{bmatrix}
C+D=1C+2D=2C+3D=2?矩阵形式为
?111?123?
?[CD?]=
?123?
?
这个的方程 Ax=b 是无解的,解决办法就是求其最优解,最优解的含义即为误差最小,这里误差就是每个方程误差值的平方和
∥
e
∥
2
=
∥
A
x
?
b
∥
2
{\begin{Vmatrix} e \end{Vmatrix}}^2 ={\begin{Vmatrix} Ax - b \end{Vmatrix}}^2
?e?
?2=
?Ax?b?
?2 ,因此就是寻找具有最小误差平方和的解 x,这就是所谓的“最小二乘”问题。 其中最接近的解为将b投影到A矩阵的系数x。
∥
e
∥
2
=
∥
A
x
?
b
∥
2
=
∥
e
1
∥
2
+
∥
e
2
∥
2
+
∥
e
3
∥
2
{\begin{Vmatrix} e \end{Vmatrix}}^2 ={\begin{Vmatrix} Ax - b \end{Vmatrix}}^2 ={\begin{Vmatrix} e1 \end{Vmatrix}}^2 +{\begin{Vmatrix} e2 \end{Vmatrix}}^2 +{\begin{Vmatrix} e3 \end{Vmatrix}}^2
?e?
?2=
?Ax?b?
?2=
?e1?
?2+
?e2?
?2+
?e3?
?2
误差即为数据点到直线距离的平方和。这部分工作可称为线性回归,在数据点中没有“离群值” 时,这是非常有用的方法。
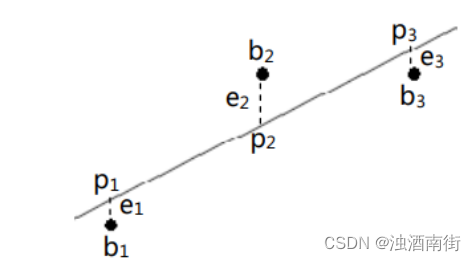
从几何上讨论求解过程,就是试图寻找数据点到直线距离的平方和
e
1
2
e_1^2
e12? +
e
2
2
e_2^2
e22? +
e
3
2
e_3^2
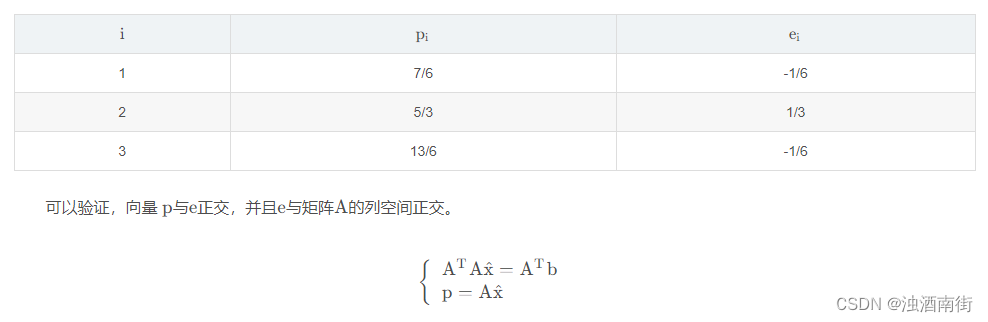
e32? 最小的情况,此时得到的 C+Dt 分别为 p1,p2和 p3,它们是满足方程并最接近于 b的结果。另一种看法是,对于 R3空间上的向量 b,它投影到矩阵 A 的列空间中会得到向量 p=[p1 p2 p3]T,投影到矩阵 A 的零空间中则为 e。

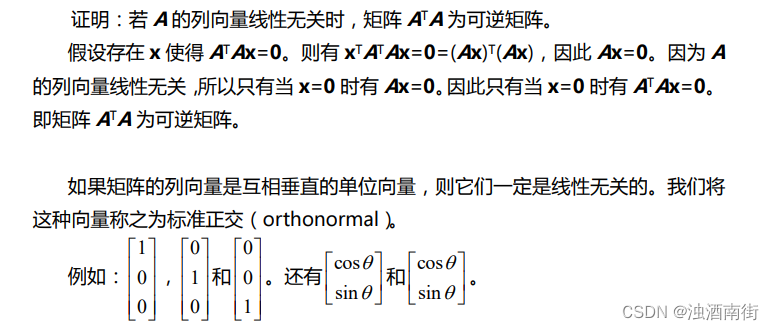
投影向量p与误差向量e是正交的:
矩阵 A T A^T ATA
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!