Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds
题目:基于点云的 6D 机器人抓取目标-辅助行为-评价
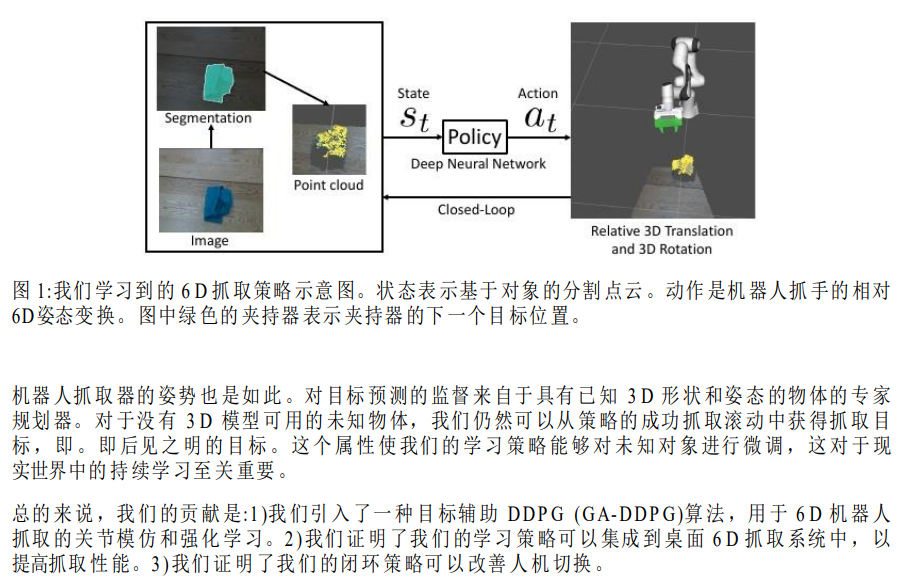
摘要:6D 机 器 人 抓 取超 越 自上 而 下捡 垃 圾桶 场 景是 一 项具 有 挑战 性 的任 务 。 以往基于 6 D 抓 取综 合和 机器 人运 动 规划 的解 决方 案 通常 在开 环设 置下 运 行, 对抓 取综 合 误差 很敏 感。 在这 项工 作中 ,我 们提 出了 一种 学习 6 D 抓取 闭环 控制 策略 的新 方 法 。我 们 的 策 略以 来 自 自 我中 心 相 机 的物 体 的 分 割点 云 作 为 输入 , 并 输 出机 器 人抓 手抓 取物 体的 连续 6 D 控制 动作 。我 们将 模仿 学习 和强 化学 习相 结合 ,并 引 入了 一种 用于 策略 学习 的 目标-辅助 行为 者-批评 家算 法。 我 们证 明了 我们 学习 到 的策 略可 以集 成到 桌面 6 D 抓取 系统 和人 机切 换系 统中 ,以 提高 对看 不见 的物 体 的抓取性能 。
一、介绍
二、相关工作
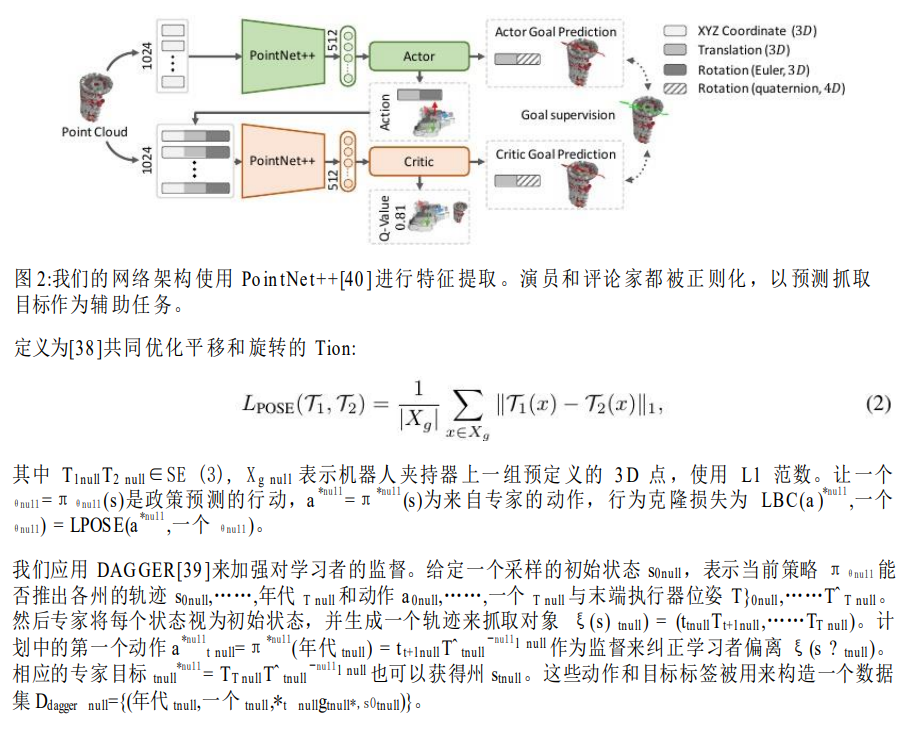
三、学习6D抓取策略
我们的目标是学习6D机器人抓取的闭环策略。 我们首先介绍相关的背景知识, 然后介绍我们学习策略的方法。




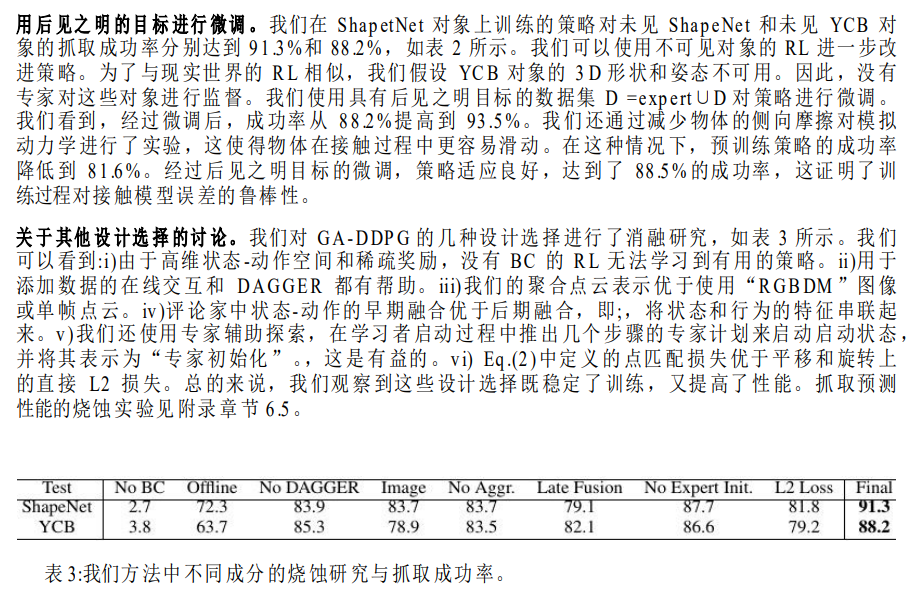
四、实验



五、结论
我们引 入目标 辅助 D DP G 算 法,从 点云 中高效 学习 6 D 抓取 控制策 略。 我们的 方法 使用来 自专 家 运动 和抓 取 计划 者 的演 示, 并 利用 抓取 目 标预 测 作为 辅助 任 务来 提高 演 员和 评 论家 的表 现 。我 们 证明, 我们 在仿 真中 训练 的策 略可 以集 成到 桌面 6 D 抓取 系统 和人-机器 人切 换系 统中 ,以 提高 看 不见 的物 体 的抓 取 性能 。对 于 未来 的工 作 ,我 们 计划 研究 由 于仿 真中 的 接触 建 模而 导致 的 策略 学 习中的模拟与真 实差 距,并 将该 方法扩 展到 混乱场 景中 的 6 D 抓取 。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!