雨雪天气下的点云滤波-几种常见的滤波算法实现及效果对比
2023-12-13 04:17:52
一、背景
针对常见的雨雪天气,分别采用ApproximateVoxelGrid、StatisticalOutlierRemoval、RadiusOutlierRemoval方法对原始lidar点云数据进行滤波,并做效果对比。
二、代码实现
代码如下:
#include <ros/ros.h>
#include <pcl_ros/point_cloud.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/filters/median_filter.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/radius_outlier_removal.h>
ros::Publisher median_pub;
ros::Publisher gaussian_pub;
ros::Publisher statistical_pub;
ros::Publisher ror_pub;
void cloudCallback(const sensor_msgs::PointCloud2ConstPtr& input_cloud)
{
// Convert PointCloud2 to PCL point cloud
pcl::PointCloud<pcl::PointXYZ>::Ptr pcl_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::fromROSMsg(*input_cloud, *pcl_cloud);
pcl::VoxelGrid<pcl::PointXYZ> voxel_filter;
voxel_filter.setLeafSize(0.1, 0.1, 0.1);
voxel_filter.setInputCloud(pcl_cloud);
voxel_filter.filter(*pcl_cloud);
// Apply median filtering
// pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud_median(new pcl::PointCloud<pcl::PointXYZ>);
// pcl::MedianFilter<pcl::PointXYZ> median_filter;
// median_filter.setInputCloud(pcl_cloud);
// median_filter.filter(*filtered_cloud_median);
// // Convert back to PointCloud2
// sensor_msgs::PointCloud2 output_median;
// pcl::toROSMsg(*filtered_cloud_median, output_median);
// output_median.header = input_cloud->header;
// median_pub.publish(output_median);
// Apply Gaussian filtering
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud_gaussian(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> voxel_grid;
voxel_grid.setInputCloud(pcl_cloud);
voxel_grid.filter(*filtered_cloud_gaussian);
// Convert back to PointCloud2
sensor_msgs::PointCloud2 output_gaussian;
pcl::toROSMsg(*filtered_cloud_gaussian, output_gaussian);
output_gaussian.header = input_cloud->header;
gaussian_pub.publish(output_gaussian);
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor;
sor.setInputCloud(pcl_cloud);
// 设置邻域点的数量
sor.setMeanK(100);
// 设置标准差倍数阈值
sor.setStddevMulThresh(0.01);
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud_statistical(new pcl::PointCloud<pcl::PointXYZ>);
sor.filter(*filtered_cloud_statistical);
sensor_msgs::PointCloud2 output_statistical;
pcl::toROSMsg(*filtered_cloud_statistical, output_statistical);
output_statistical.header = input_cloud->header;
statistical_pub.publish(output_statistical);
pcl::RadiusOutlierRemoval<pcl::PointXYZ> ror;
ror.setRadiusSearch(0.2);
ror.setMinNeighborsInRadius(4);
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud_ror(new pcl::PointCloud<pcl::PointXYZ>);
ror.setInputCloud(pcl_cloud);
ror.filter(*filtered_cloud_ror);
sensor_msgs::PointCloud2 output_ror;
pcl::toROSMsg(*filtered_cloud_ror, output_ror);
output_ror.header = input_cloud->header;
ror_pub.publish(output_ror);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "point_cloud_filter");
ros::NodeHandle nh;
ros::Subscriber cloud_sub = nh.subscribe<sensor_msgs::PointCloud2>("/hesai/pandar", 1, cloudCallback);
median_pub = nh.advertise<sensor_msgs::PointCloud2>("/median", 1);
gaussian_pub = nh.advertise<sensor_msgs::PointCloud2>("/gaussian", 1);
statistical_pub = nh.advertise<sensor_msgs::PointCloud2>("/statistical", 1);
ror_pub = nh.advertise<sensor_msgs::PointCloud2>("/ror", 1);
ros::spin();
return 0;
}
CMakeLists.txt比较简单,大家自行编写,有需要留言。
三、效果对比
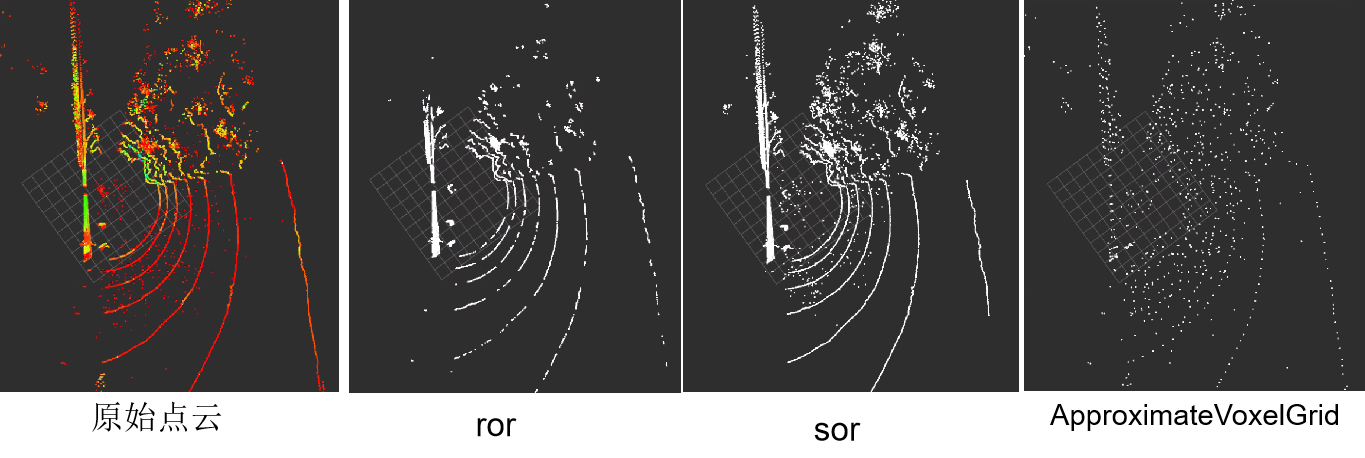
可以看到针对雨雪天气点云噪点情况,ror的滤波效果最好。
文章来源:https://blog.csdn.net/zhaoliang38/article/details/134947564
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!